基于dsPIC30F4013控制器旋转角度检测系统的研究
2011-02-10翁惠辉陈永军
曹 宇,翁惠辉,陈永军
(长江大学电子信息学院,湖北荆州434023)
冯 定
(长江大学机械工程学院,湖北荆州434023)
传统的测量角度装置,一般由带通孔的转盘外加2支正交安装的光电传感器或机械齿轴外加正交安装的磁感应传感器测试,实现对机械旋转角度的检测。在这种机构下要提高测量精度必需加大转盘或齿轮的尺寸,笔者针对高造斜分支钻井井下工具空间小的特殊环境,提出基于多传感器差分的旋转角度检测方法,即在有限齿轮不增加齿数的条件下,靠增加传感器个数方式来提高控制精度,并选用体积小、灵敏度高、抗干扰能力强的KMI16/1霍尔传感器作为感测元件,以美国微芯公司的dsPIC30F4013单片机为主构成角度测量方法,实现对旋转角度的高精度检测。
1 霍尔传感器KM16/1的工作原理
KMI16/1芯片内含高性能磁钢、磁敏电阻传感器和IC,其组成原理如图 1所示。它利用IC来完成信号变换功能,其输出的电流信号频率与被测角度成正比,电流信号的变化幅度为7~14mA。由于其外围电路比较简单,因而很容易配二次仪表测量角度。传感器的测量范围宽,灵敏度高,齿轮转动频率范围是0~25k Hz,传感器和被测物的距离最大磁感应距离为2.9mm,同时该传感器抗干扰能力强,同时具有方向性,对轴向振动不敏感[1]。

图1 霍尔传感器组成原理
2 旋转角度传感器差分检测方法
高造斜分支钻井井下工具的导向装置主要是依靠内部的2个偏心环完成导向钻进,通过检测和控制2偏心环的旋转角度,达到导向钻进的目的。
偏心环共有45个凹凸齿,每个齿面4°。实现1°的检测精度要求在1个齿面上安装4个传感器,基于机械安装难度,采用如图2所示的差分安装。图中A,B,C,D分别为4支KMI16/1霍尔传感器,差分安装具体位置如下:传感器A中心线与齿端差0°;传感器B中心线与齿端相差1°;传感器C中心线与齿端相差2°;传感器D中心线与齿端相差3°。

图2 机械安装原理图

图3 顺时针检测波形图
当齿轮旋转1°时,传感器 A正好与凸齿面错开,磁力线被屏蔽 (分流),传感器A首次跳变为低电平;当齿轮旋转2°时,传感器 A,B与凸齿面错开,传感器A产生电流保持在低电平,传感器B首次跳变为低电平;当齿轮旋转3°时,传感器 A,B,C与凸齿面错开,传感器A,B保持在低电平,传感器C首次跳变为低电平;当齿轮旋转4°时,传感器A,B,C与凸齿面错开,传感器A,B,C保持在低电平,传感器D首次跳变为低电平;当齿轮旋转5°时,传感器A中心线与凸齿端对正,传感器A产生的信号由低变高,传感器B,C,D与凸齿面错开,传感器B,C,D保持在低电平;当齿轮旋转6°时,传感器A中心线与凸齿面对正,传感器A产生的信号继续保持高电平,传感器B中心线与凸齿端对正,传感器B产生的信号由低变高,传感器C、D与凸齿面错开,传感器C、D产生的信号保持在低电平;当齿轮旋转7°时,传感器A,B中心线与凸齿面对正,传感器A,B产生的信号继续保持高电平,传感器C中心线与凸齿端对正,传感器C产生的信号由低变高,传感器D与凸齿面错开,传感器D产生的信号保持在低电平;当齿轮旋转8°时,传感器A,B,C与凸齿面对正,传感器A,B,C产生的信号继续保持高电平,传感器D中心线与凸齿端对正,传感器D产生的信号由低变高。依此类推,凹凸齿面传感器的跳变信号共有8个,其角度检测的精度达到1°。具体检测波形如图3所示。同理可推出逆向旋转时的检测波形,如图4所示。

图4 逆时针检测波形图
3 系统实现
角度检测系统的内核为美国微芯的dsPIC30F4013单片机,dsPIC30F4013是MIROCHIP公司专门为数字信号高速采集与控制所设计的1种16位微处理器,具有强大的数字信号处理能力,所有的输入端口都是施密特触发输入,可以提高器件的抗噪音干扰能力。它具有以下基本特点[3]:①1个16位CPU和1个DSP内核;②当内部时钟频率为最高120MHz时,进行1次16位乘法运算为8.3ns;③包括2048字节的寄存器RAM、48KB的片内程序空间、1024字节的EEPROM;④中断7个、I/O口共21条I/O口线;⑤1路全双工的UART功能模块、1个同步串行SPI功能模块、1个 I2C串行通讯模块和 1个 CAN串行通讯模块;⑥片内设有1个6通道的A/D转换器,工作在 10位模式,采样保持时间、转换时间、阀值检测方式和零偏补偿校正均可编程;⑦5个16位定时器;有4路捕捉器、2路比较/标准脉宽调制单元 (PWM)模块。DIP封装引脚图如图5所示。
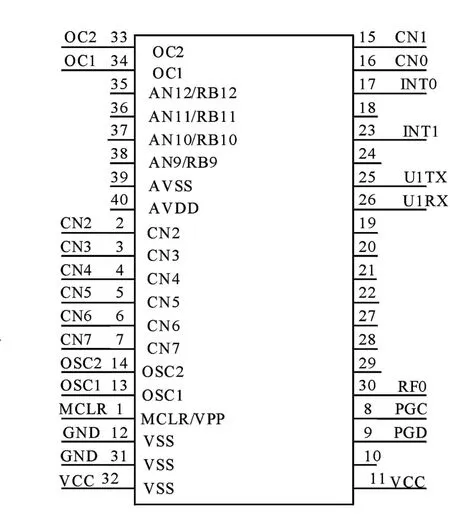
图5 DIP封装引脚图

图6 数字信号控制器与KMI16/1电气连接图

图7 控制程序流程图
该数字信号控制器的I/O口具有复用功能,复用了输入电平变化中断模式,使dsPIC30F4013器件能够向处理器发出中断请求,以响应所选输入引脚的状态变化。利用单片机这一电平变化中断模式,可以方便的组成检测电路,数字信号控制器与KMI16/1电气连接图仅给1路传感器硬件接口电路,其它3路完全一样 (见图6)。差分安装的4支传感器A、B、C、D相应调理电路分别接到单片机的 CN0~CN3,CN 0~CN3每一电平跳变一次代表旋转1°。另从图3看出,对于顺时针旋转时有:传感器A信号|传感器B信号=1(传感器A信号跳变),传感器B信号|传感器 C信号 =1(传感器B信号跳变),传感器C信号|传感器D信号 =1(传感器C信号跳变),传感器D信号|传感器 A信号 =1(传感器D信号跳变);对于逆时针旋转时有:传感器A信号|传感器 B信号 =0(传感器A信号跳变),传感器B信号|传感器C信号 =0(传感器B信号跳变),传感器C信号|传感器D信号 =0(传感器C信号跳变),传感器D信号|传感器 A信号 =1(传感器D信号跳变)。为此,基于dsPIC30F4013单片机程序流程图如图7所示。
4 结 语
利用DSPIC4013的电平跳变中断模式实现了角度信号的采集,简化看了外围电路,释放了更多的有效空间。根据实践检测可知,传感器差分安装方法能更有效的提高角度检测精度。目前该方法已经成功地应用于高造斜分支钻井工具的样机研究中。
[1]王金华.KMI集成转速传感器的原理以及在齿轮流量计设计中的应用 [J].计测技术,2008,28(B10):106-107.
[2]李红果.一种光电编码器位置检测系统研究与应用 [J].单片机开发与应用,2008(24):88-91.
[3]刘和平.dsPIC通用数字信号控制器原理及应用[M].北京:北京航空航天大学出版社,2007.