一种内河船舶监控通信系统的设计与实施
2011-02-09余明艳王贵恩支和才
余明艳,王贵恩,支和才
(广东交通职业技术学院,广州 510800)
0 引言
目前我国内河航运信息化管理的程度不高,内河航运企业对运营船舶的监管通过船载移动电话进行信息交流,不利于航运高效管理,且通信成本较高。同时,内河航运安全的监控大多还处于人工操作阶段,即在航道上设置若干助航标志,主要依靠船舶驾驶人员的经验来保障航行的安全性,驾驶人员的劳动强度很大,存在较大的安全隐患。因此,随着内河航行作业的船舶数量和运输量大幅度上升,产生了诸如船只动态数据管理、水上安全监控与保障、紧急事故处理、水上油品、化学品和危险品的污染监测、防治处理等一系列问题。目前这些系列问题主要依靠航道管理部门人员的人工监管来实现,管理效率低下,容易造成监管不到位的情况。

图1 内河船舶监控通信系统拓朴图
一种内河船舶通信监控系统,包括GPS卫星、监控中心、中转基站服务器、安装在船舶上的船载远程终端,其系统的拓朴结构如图1所示。船载远程终端接收GPS卫星的发送信号,确定船舶的实时地理位置,通过中转基站将信息发送到处于岸基的监控中心,由监控中心的通信子系统、监控子系统、GIS子系统等进行一系列协同数据传送、分析、处理后向船载远程终端发出预警信息,示意船舶正处于危险区域,提醒船员做好防范工作,确保安全通过危险区域。该系统实现了对内河船舶的航行路线、航行速度、内部系统、到港时间等进行实时监控管理,有效解决了船舶驾驶过程中船舶故障预警、船舶航线安全预警等一系列难点问题,进一步提高了内河船舶航行的安全性。
1 嵌入式船载远程终端的设计与实现
1.1 嵌入式船载远程终端的硬件设计
针对内河船舶通信管理的实际[8],为了将内河船舶的位置、航向以及警报等信息实时地传送到监控计算机[4],设计开发了基于GPS/GPRS技术、嵌入式系统和现代控制技术的船载远程终端,船载远程终端硬件设计图如图2所示。船位和预警信息经过处理器,由移动通信网络发送到监控中心,监控计算机从串行端口读出数据进行地图匹配和显示。监控中心的管理和调度信息通过移动通信网络以短信息(SMS)的形式发送到远程终端,并在液晶屏上显示。该系统的硬件设计主要包括ARM微处理器、GPRS模块、GPS模块、数据采集模块、现场调试模块、键盘、显示器、报警器、执行器等部分。

图2 船载远程终端硬件设计图
1.1.1 ARM微处理器
本系统采用W77E58微处理器,其内部包含32KB的E2PROM和1KB的SRAM,可以省去外部扩展存储器。具有2个增强型串口和1个调试接口,12级中断和3个16位定时/计数器,外部数据访问周期可编程,因而完全满足本系统的要求。
本系统集成了SIEMENS公司的MC35i模块作为GPRS解决方案,该模块支持EGSM900和GSM1800双频;支持数字、语音、短消息和传真;数据交换最高速率为9.6kbps;支持电压范围从5V至24V,低功耗;采用工业接口GSM Phase2/2+标准,内部包含针对GPRS/CDMA的PPP-TCP/IP协议栈。集成了标准的RS232接口以及SIM卡,可以由微处理器用AT命令通过串口进行设置。因而采用MC35i模块与本系统的串行端口相连接,使硬件部分简单实用,远程通信的开发主要集中在软件方面。
1.1.2 GPRS模块
GPRS模块具体采用MC35i模块作为GPRS解决方案,支持EGSM900和GSM1800双频;支持数字、语音、短消息和传真;数据交换最高速率为9.6kbps;支持电压范围从5V至24V,低功耗;采用工业接口GSM Phase2/2+标准,内部包含针对GPRS/CDMA的PPP-TCP/IP协议栈。集成了标准的RS232接口以及SIM卡,可以由微处理器用AT命令通过串口进行设置。因而采用MC35i模块与本系统的串行端口相连接,使硬件部分简单实用。
1.1.3 GPS模块
GPS模块具体为GPS15模块,为并行12通道GPS接收机,可同时跟踪12颗卫星、定位精度高、功耗低。结构紧凑、易于应用、接收机信息可方便的显示于显示单元或PC机上。全屏蔽封装、具备优秀抗电磁干扰特性。 用户无需初始化,安装完毕接收机即可自动传送导航数据。3.3V供电电压。该模块单点定位精度小于15m,导航速度精度小于0.05m/s,串口波特率4800bps~9600bps,定位数据输出更新率1Hz。
船舶GPS定位采用GARMIN公司的GPS15模块,为并行12通道GPS接收机,可同时跟踪12颗卫星、定位精度高、功耗低。结构紧凑、易于应用、接收机信息可方便的显示于显示单元或PC机上。全屏蔽封装、具备优秀抗电磁干扰特性。用户无需初始化,安装完毕接收机即可自动传送导航数据。3.3V供电电压。该模块单点定位精度小于15m,导航速度精度小于0.05m/s,串口波特率4800bps~9600bps,定位数据输出更新率1Hz。
1.1.4 数据采集模块信号采集端口
数据采集模块预留8个通用I/O口,其中输入端口4位,输出端口4位,可作为船舶报警信息输入量和警报信号输出量与处理器的接口。
1.1.5 液晶显示器
显示器每屏最多可显示32个汉字字符和128个英文或数字字符。显示内容分为初始化、船舶位置信息、时间信息和短信息等四个页面,可通过专用按键进行翻页操作。其中,船舶位置信息页面可显示当前船舶的经度、纬度、航速和航向,时间信息显示当前北京时间和公历年、月、日等。若收到来自监控中心4的短信息,页面会有提示,可通过专用按键操作显示。
1.1.6 键盘
键盘包括复位、翻页、上翻、下翻、发送5个按键。复位按键用于船载远程终端的热启动,可使系统复位重新运行;翻页按键与上翻、下翻按键配合使用,用于切换查看液晶显示主界面、日期时间界面和短信息界面;发送按键用于切换自动发送/停止自动发送定位信息功能,每按下一次则切换自动发送/停止自动发送;报警按键对应3个级别的警报发送,按下相应按键则发送相关级别的警报信息。
1.1.7 现场调试模块
现场调试模块方便用户以后对船载远程终端2进行部分参数更改,以适应不同时候不同环境的系统需求。
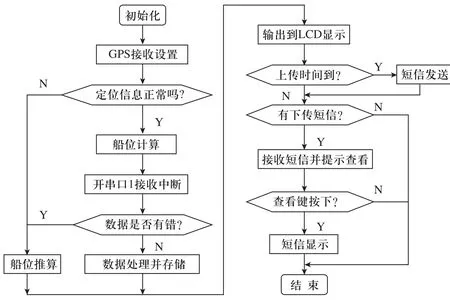
图3 主程序流程图
1.2 船载远程终端的程序设计
在船位推算方法辅助GPS进行船舶定位的基础上[5][6],设计了远程终端的微处理器程序,共分为初始化、GPS定位信息接收、GPRS通信信息的发送和接收[2]、显示控制、按键处理、定位信息处理和推算等几个功能模块,主程序流程如图3所示。
GPRS的发送和接收控制采用串行中断方式,通过AT指令进行短信息操作3,如设置短信格式为 AT+CMGF, 设 置 短 信 存 储 载 体 为 AT+CPMS,设置短信接收提示方式为AT+CNMI, 发送短信为AT+CMGS, 显示短信为AT+CMGL。短信息发送采用PDU(用户分组数据单元)格式,用户数据最长可用到140字节。
为了提高数据传输的加密和解密功能,监控中心发送英文和数字则短信息前加“*”,如“*AAA123或*321Aa”,而发送中文则信息前加“**”,并转换为GB2312码,如发送“有台风”信息则应转换为“**D3D0CCA8B7E7”。
按照信息功能和类别,远程终端发送的信息分为三种情况,即定位信息、报警信息和查位信息。
1.2.1 船舶定位信息
在终端系统处于自动发送状态时(发送指示灯亮),终端以短信息方式向监控中心自动发送船位等GPS信息,格式如下:
“$GPRMC,004004,A,2301.0039,N,11320.3514,E,,,010110,2.0,W*�”,
其中包括北纬和东经等船舶位置信息,程序中设计了报头判别和信息转换,若未能取得有效的定位信息,则采用船位推算方法进行补偿。 如 本 信 息 中,“$GPRMC”是GPS定 位 信息报头,“004004”为世界时信息,“A”或“V”分别表示该定位信息是有效信息或无效信息,“2301.0039,N,11320.3514,E”表示当前船舶处于北纬23°01.0039′东经113°20.3514′的位置。
默认情况下,每次发送间隔为1分钟以短信息方式发送一次GPS信息,如果GPS没有定位,开始将会有信息提示,此时可以关闭发送。
1.2.2 报警信息
在按下报警按键时(报警指示灯闪烁1次),终端以短信息方式向监控中心警报信息,包括警报级别、船舶位置和报警时间等信息,其格式如下:
“$ALARM,A, $GPRMC,093031,A,2322.2573,N,11311.8652,E,0.0,62.3,151107,2.0,W*�”
或 “$ALARM,B, $GPRMC,000515,A,2314.337 4,N,11312.0330,E,,,010110,2.0,W*�”
或 “$ALARM,C, $GPRMC,001534,V,2314.3374,N,11312.0330,E,,,010110,2.0,W*33,050”
其中,“$ALARM”是报警信息报头,报头后的“A”、“B”或“C”表示警报级别,其后为报警时的船舶位置和时间等信息。
1.2.3 查位信息
当监控中心向船载终端发送“*find”指令时,表示监控中心欲查询某船舶的位置信息。此时,收到此短信息的船载终端将立即自动向监控中心发送一次本船舶的位置信息,并在终端液晶显示器显示“find”短信,查位信息格式如下:
“$GPRMC,000145,V,3851.3330,N,09447.9410,W,,,010110,3.1,E*�0,000,00*find”
查位信息与定位信息格式相似,不同的是查位信息的最后带有“*find”字串。
预警提示
当监控中心接收到船位信息并判断船舶处于预警危险区域范围内,自动向船载终端发送预警短信息,其信息格式为:“**D7A2D2E2A3BA”+预警内容的GB2312编码字串,船载终端收到后,控制蜂鸣器短响三声进行预警提示。

图4 监控中心的构成
2 监控中心的组成
监控中心的组成包括通讯子系统、监控子系统和GIS子系统。通讯子系统包括数据接收接口、数据发送接口。监控中心的构成图如图4所示。监控子系统包括监控模块、数据处理模块、用户管理模块、信息库;GIS子系统包括GIS数据库、GIS数据处理模块。GIS数据处理模块包括数据输入子模块、数据编辑子模块、数据查询与分析子模块、数据管理子模块、数据输出子模块。
数据输入模块负责GIS数据库中点、线、面数据的输入;数据编辑模块负责建立空间数据的拓扑关系,实现空间数据和属性数据的关联,完成数据的增加、删除和修改;数据管理模块负责数据库的定义、建立、访问和维护;数据管理模块负责对空间数据进行放大、缩小、漫游等操作,对空间数据及属性数据进行双向查询,对空间数据进行分析等;数据输出模块负责显示或输出地形图、专题图、文档与表格。
3 内河船舶监控通信系统的工作过程
3.1 自检和初始化
船载远程终端上电开机后,首先进行自检和初始化,自检及初始化过程结束后,终端系统对GPS模块进行检查,若GPS模块尚未取得有效的定位信息,则显示“GPS没有定位”的信息提示界面,并保持显示约5s;若GPS模块已取得有效的定位信息,或GPS没有定位提示信息显示5s后,则显示提示东经、北纬、航速、航向的信息界面,完成船载远程终端的初始化。船载远程终端接收到监控中心的命令后,通过ARM微处理器进行分析处理后,由执行器对船舶各个系统进行操作,实现远程操作。
3.2 信息传输及信息处理
船载远程终端与GPS卫星之间相互通信,通过GPS卫星的定位确定船舶的实时地理位置7〕,如船舶所在的经度和纬度。船载远程终端获取到船舶的地理位置信息后,通过中转基站服务器将该信息发送到处于岸基的监控中心,数据通过通讯子系统的数据接收接口传输到监控子系统中,并由监控模块、数据处理模块进行分析、处理,最后将数据与GIS数据库中存储的地理位置信息进行比较,从而在GIS数据库中提取出船舶所处的实时经纬度所对应的地理位置信息,该地理位置信息为已知的点、线、面数据。被提取的点、线、面数据再经过GIS数据处理模块进行处理后,可建立起船舶航行的地理位置信息地图,达到实时监控船舶航行的目的。另外,当船舶所处经纬度不能从GIS数据库中提取出对应的地理位置信息时,可通过数据处理模块、GIS数据处理模块对新的地理位置信息进行录入,并储存到GIS数据库中相应的位置,以便以后可以直接调用。
3.3 预警实现
在河道中,总有一些危险区域,例如桥梁、暗礁或弯道等。在本系统中,设置一个预警危险区域表[1],把桥梁、暗礁或弯道等危险区资料存放在此表中。在监控启动后,接收到船舶上船载远程终端发来的方位信息,并从GIS数据库提取出具体地理位置信息后,与表中预警危险区域比较,经过数据处理模块、监控模块的分析处理后,最后由通讯子系统中的数据发送接口向船载远程终端发出预警信息,示意船舶正处于危险区域,提醒船员做好防范工作,确保安全通过危险区域。[9][10]船员可通过船载远程终端上的“上翻”或“下翻”按键,查看来自监控中心的短信息。按下“切换”按键,则返回主界面。当液晶屏显示 “find” 短信息时,表明监控中心正在进行查位操作,船载终端系统会自动向监控中心发送本船舶的位置和航向信息。 当监控中心接收到船位信息并判断船舶处于预警危险区域范围内,自动向船载远程终端发送预警短信息,船载远程终端收到后,控制报警器进行预警提示。
4 结束语
本文涉及的一种内河船舶监控通信系统是一种集监控、查询、预警等多功能于一体的远程监控系统。不仅能够对船舶的航行路线、航行速度、内部系统进行实时监控和查询,且能够自动对船舶发出预警信息,进一步提高了船舶航行的安全性。
[1] 王贵恩,孙永林,吴晶.基于小波神经网络的船舶航迹盲区补偿方法[J].通信技术,2009(1).
[2] 余臻,基于AT指令集的远程通信的实现[J].厦门大学学报,2004(3).
[3] 江泽西,吕风,GSM网络AT指令仿真系统的研究与开发[J].现代计算机技术,2005(17).
[4] 吴泉源,刘江宁,人工智能与专家系统[M].国防科技大学出版社,1995.
[5] Joseph Giarratatano,Gary Riley,Expert Systems Principles and Programming[M].机械工业出版社,2000.
[6] 王贵恩,孙永林,基于船位推算和GPS的嵌入式内河船舶远程终端设计[J].交通与计算机,2007(3).
[7] 孙永林,王贵恩,朱强,基于GSM移动通信网络的内河船舶监控系统的研制[J].交通与计算机,2008(1).
[8] 许焕明,王贵恩,基于INMARSAT Fleet 33的河海船舶监管通信系统的研究[J].航海技术,2007(6).
[9] 朱强,王贵恩.分层对等网搜索模型研究[J].计算机与数字工程,2007(6).
[10] 许焕明,王贵恩,孙永林.内河船舶监督预警通信管理系统运行模式的研究[J].通信技术,2008(9).
