弹性限位浮筏系统的随机振动建模与算法
2011-02-05温建明
温建明,冯 奇
(同济大学 航空航天与力学学院,上海 200092)
弹性限位浮筏系统的随机振动建模与算法
温建明,冯 奇
(同济大学 航空航天与力学学院,上海 200092)
对具有弹性限位的浮筏隔振系统,采用单边约束动力学方程,引入接触力,建立系统的确定性方程。再设系统的激励受随机因素的影响,导出系统的随机离散动力学模型,给出离散的计算格式。由于浮筏系统中限位器的个数很多,系统受冲击后,限位器接触状态的可能性非常多,因此对于限位器的接触状态的判别采用了人工神经网络,使得接触计算得以实现。最后通过实例分析对系统的随机动力学特性进行分析,给出噪声对系统振动周期性的影响,以及限位器间隙与位移方差之间的关系。
浮筏隔振系统;弹性限位器;随机模型;人工神经网络
浮筏隔振系统是为了适应舰艇的抗冲隔振要求而形成的一种新型隔振系统[1],不仅要具有良好的隔振性能,而且还要满足抗冲击的要求。为了限制冲击载荷引起的大位移,通常在隔振系统中增加限位装置。限位器一般分为两种:刚性限位器和弹性限位器。刚性限位器在承受冲击作用时,会造成极大的二次冲击。因此,限位器在设计时一般都具有一定的柔度,以避免在减小位移时产生过大的二次冲击。带限位器的隔振系统由于本质属于非线性动力学系统,因此在工程界受到了广泛关注。现有的文献对弹性限位浮筏系统进行的动力学研究主要集中在确定性系统[2-4],实际上由于噪声存在的普遍性,建立系统的随机动力学模型更符合实际。具有弹性限位器的浮筏系统受冲击后,在运动的过程中不断出现限位器和筏体或限位器和机组之间的接触,系统表现出明显的非光滑特性。因此文中采用F.Pfeiffer给出的具有单边约束动力学方程,引入接触力,建立系统的确定性方程[5]。再设系统的激励受到噪声的影响,受冲击后,限位器发生接触,且接触的时间间隔较小,这样即使是低强度的白噪声摄动,系统的均方响应也不为零,这时低强度的白噪声对系统的影响就应该引起注意。因此有必要建立弹性限位浮筏系统的随机动力学模型,导出系统的离散计算格式。由于浮筏系统中限位器的个数很多,对于限位器的接触状态的判别采用了人工神经网络,使得计算得以实现。最后,通过实例分析对系统的随机动力学特性进行分析。
1 随机离散模型的建立
图1为主变流机组浮筏隔振系统的简化模型,系统包含有3个机组,通过中层筏体进行双层隔振,系统中设置有隔振器和限位器。

图1 浮筏隔振系统的简化模型Fig.1 Simplified model of floating raft
带弹性限位装置的浮筏隔振系统的运动微分方程可以写成如下式[6-7]:

其中,M为系统的质量矩阵,C为系统的阻尼矩阵,K为系统的刚度矩阵,X为系统的广义坐标列向量,λN为接触力向量,WN为接触力的系数矩阵,F为系统的外激励。
假设在某一确定的接触状态下,将接触力项合并到KX项中,系统的运动微分方程可写为:

Kc表示某一确定的接触状态下的刚度,需要根据接触条件确定。
方程(2)中的外激励F由于受到外界各种因素的影响,一般都具有随机特性,在此将激励分为确定性的简谐激励和随机激励,

为了导出一个离散的随机模型,假定系统的响应由确定性部分的响应和随机部分的响应两部分组成。引进关系:

这样方程(2)可以分解为确定性振动和随机振动两部分:

1.1 系统受确定性激励的响应
方程(4)是确定性的多自由度线性微分方程,令

1.2 系统受随机激励的响应
1.3 离散的随机模型
将确定性部分和随机部分叠加,可以得到一个关于系统平均响应的计算格式:

上式中tk+1,tk为对应的限位器某两个接触状态下的时间点,Δtk为两接触状态之间的时间差。
2 实例分析
浮筏隔振系统的上层组件共安装3×10只减振器和3×6只抗冲击限位器,下层组件共安装3×12只减振器和3×6只抗冲击限位器,下层限位器安装在基础上,上层限位器安装在筏体上,限位器的刚度取为隔振器的0.7倍。根据德国海军冲击规范,冲击加速度取为:

冲击时间:τ=0.012 s。
冲击和冲击后的位移、速度采用解析方法计算得到,限位器的接触状态通过人工神经网络算法确定[8-9],该算法已经被文献[10]证明是可靠的。
2.1 人工神经网络算法
利用高斯原理构造目标函数如下:

得到满足约束条件下目标函数G最小。
设在某一时刻t,神经网络状态变量为:Z=[Z1…Zn]T,输出变量为:V=[V1… Vn]T,n为系统的自由度。
根据要求的目标函数,设计Hopfield能量函数E,令V=μ
Hopfield能量函数E不是直接与状态变量Z有关,而是与输出变量V直接有关,状态变量Z与输出变量V的关系为:

2.2 实例计算
将冲击荷载作用后获得的位移和速度作为冲击后阶段运动的初值,冲击后系统受到小强度噪声摄动和柴油机的第一阶不平衡惯性力与惯性力矩的共同作用。柴油机的第一阶不平衡惯性力与惯性力矩:

噪声摄动的强度:D=0.2,计算时间为冲击后0 s~10 s,图2是冲击后的稳态均值,图3是取冲击后在时间为10 s之内方差的最大值。
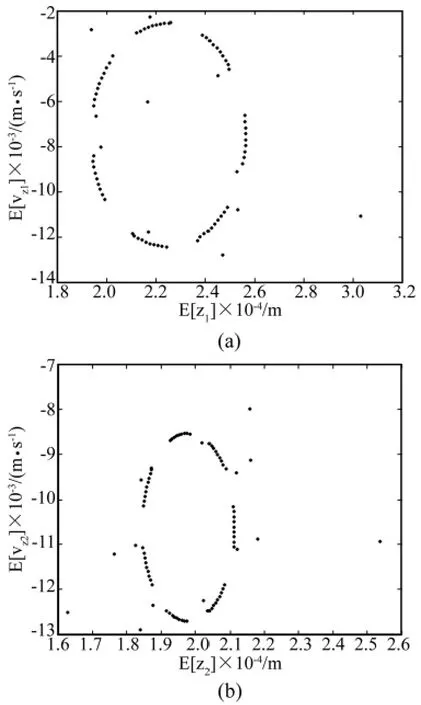
图2 垂向平均庞加莱图Fig2.The vertical mean pioncarémap
图2(a)为筏体的垂向平均庞加莱图,横坐标为垂向平均位移E[z1],纵坐标为垂向平均速度 E[vz1],图2(b)为机组的垂向平均庞加莱图,横坐标为平均位移E[z2],纵坐标为垂向平均速度 E[vz2]。图示表明,由于噪声的影响,浮筏隔振系统在振动过程中的平均庞加莱图不再是封闭的环形,其周期性被破坏。
图3(a)为筏体的垂向位移方差最大值与限位器间隙的关系,图3(b)为机组1的垂向位移方差最大值与限位器间隙的关系,横坐标为限位器间隙,纵坐标为垂向位移方差最大值,σz1max表示筏体的位移方差最大值,σz2max表示机组1的位移方差最大值。可以看出,限位器间隙不同,位移方差的最大值是不一样的,筏体的位移方差最大值在限位器间隙为10 mm达到了最大,机组1的位移方差最大值在限位器间隙为6 mm达到了最大,当限位器间隙比较大时,对位移方差和速度方差的最大值没有明显影响。
3 结论

图3 垂向位移方差最大值与限位器间隙的关系Fig.3 The relationship between the maximum of vertical displacement variance and the gap of limiter
本文建立了具有弹性限位器的浮筏隔振系统的随机离散模型,给出了系统的平均响应离散计算格式,采用人工神经网络算法判别限位器的接触状态。通过实例分析指出,在噪声摄动的影响下,系统的周期特性被破坏;限位器的间隙对筏体和机组的位移方差的影响不一样,筏体的位移方差最大值在限位器间隙为10 mm达到了最大,机组1的位移方差最大值在限位器间隙为6mm达到了最大。当限位器间隙比较大时,对位移方差和速度方差的最大值没有明显影响。这是由于限位器间隙比较大时,冲击后没有发生限位器的接触。
[1]林 立.浮筏隔振技术在舰船上的应用与发展[J].声学技术,1999,18(11):1-4.
[2]翁雪涛,朱石坚,何 琳.限位器抗冲击计算[J].中国造船,2002,43(2):85-89.
[3]王国治,李良碧.船舶浮筏系统动力学特性的影响因素研究[J].中国造船,2002,43(1):43-51.
[4]祝 华.浮筏装置的理论建模与分析方法[J].舰船科学技术.1994,7(2):152-155.
[5]Pfeiffer F,Glocker C.Multibody dynamics with unilateral contacts[M].Wiley.1996.
[6]Pfeiffer F.Mechanical system dynamics[M].Springer,2008.
[7]彼得·艾伯哈特,胡 斌.现代接触动力学[M].南京:东南大学出版社,2003.6.
[8]田景文,高美娟.人工神经网络算法研究及应用[M].北京:北京理工大学出版社.2006.
[9]Hopfield J.Neurons networks and physical system with emergent collective computational properties[J].Proc.Natl.Acad.Sci.,1992,79:2554-2558.
[10] Feng Q,Tu J.Modeling and algorithm on a class of mechanical systems with unilateral constraints[J].Archive of Applied Mechanics,2006,76(1-2):103-116.
Stochastic vibration model and algorithm for a floating raft with elastic limiters
WEN Jian-ming,FENG Qi
(School of Aerospace Engineering and Applied Mechanics,Tongji University,Shanghai 200092,China)
Here,for a floating raft with elastic limiters,using the unilateral kinetics equations,the deterministic model was established through adding the contact force.Supposing the external force of the system was affected by the white noise.It was necessary to establish the random dynamical model for the system.Considering the universality of noise,based on the random vibration theories,a stochastic non-smooth model of the floating raft with elastic limiters was built up and the discrete computing algorithms were derived.There were many limiters in the floating raft system.So,it was difficult to determine the contact configurations of limiters.The artificial neural network could be used to distinguish the contact state of elastic limiters.The random responses of the floating raft were analyzed with an example.The effect of noise on the vibration of the system and the relations between the displacement variance and the gap of limiters were obtained.
floating raft;elastic limiter;stochastic model;artificial neural network
O324
A
国家自然科学基金项目(10702051)
2010-04-21 修改稿收到日期:2010-06-24
温建明 女,博士,副教授,1972年11月生
