异步电机的自适应节能控制研究
2011-02-03王培全王鹏韩正之
王培全 王鹏 韩正之
(上海交通大学 电子信息与电气工程学院,上海 200240)
0 引言
基于矢量控制的异步电机节能增效控制方法,本质上是通过调节电机运行时磁链幅值来实现的。在采用转子磁场定向的电机矢量控制系统中,定子电流励磁分量和转矩分量是解耦的,转子磁链与励磁分量成正比,因此可以通过控制励磁电流来优化电机效率。目前异步电机节能控制方法大体上分为两种:模型法(Loss Model Control,LMC)[1,2]和 搜 索 法 (Search Control,SC)[3~6]。模型法通过建立异步电机最小损耗模型,直接由计算获得最优励磁,系统响应速度快,但是需要精确建模,受电机参数和合环境温度变化影响大,对不同电机缺乏通用性。搜索法省去了繁琐的铁芯分析,通过搜索电机运行的最小电流或者最小输入功率来确定最优运行点,不依赖于电机参数和模型的先验信息,寻优精度高,但是对电流、功率、转速等的测量要求高,并且算法收敛时间较长。Rosenbrock法、梯度法和黄金搜索法是早期研究的一些搜索算法。近年来,智能控制技术的发展为以多变量、强耦合、非线性、大滞后、时变等为特征的电机系统研究提供了有力的工具。滑模变结构、遗传算法、模糊控制[4-6]和人工神经网络等方法纷纷引入电机控制领域。
1 异步电机节能运行原理
异步电机的损耗包括定子铜耗、转子铜耗、铁耗、机械损耗以及杂散损耗。铜耗与定子和转子电流的平方成正比;铁耗与气隙磁通密度和电源频率有关;机械损耗与电流和气隙磁场无直接联系但是和机械转速有关,低速时机械损耗较小;杂散损耗是由于齿槽相对运动,磁阻变化等因素引起,难于建模也不易控制。因此,异步电机节能运行的重点是寻求铜耗和铁耗的平衡。当电机运行在额定工况时,损耗以铜耗为主,铁耗次之。而电机轻载运行时,若仍然保持磁通恒定,铜耗大大下降了,铁耗却变化不大。这时若适当降低磁通,铁耗和定子铜耗会随之降低。同时,为了维持转矩不变,转矩电流必须增加,从而导致转子铜耗有所升高。若磁通降得过低,虽然铁耗很小,但转子铜耗和由转矩电流而产生的定子铜耗会有明显增加。因此,对于某一给定转矩、转速的运行点,存在一个最优磁通,使铁损和铜耗达到某种平衡,电机的总损耗最小,此时系统运行实现最优化。
若忽略漏感,磁饱和与温升对电机参数的影响,电机的可控损耗总和为

由于ploss一阶导数存在零点且对其求二阶导数得

图1揭示了3个信息

图1 不同转矩与转速下的最优磁链
(1)对任意给定工况(一定转矩和转速),随着磁链由额定值向零变化,损耗先单调递减然后单调递增,磁通是损耗的凸函数,总是存在一个最优磁通,使电机运行在此磁通时损耗最小。
(2)低速或者低转矩工况下节能空间更大;
(3)在最优点两侧,损耗曲线并非对称变化,而是在弱磁区变化的更快。这一特性影响了本文后面的模糊控制规则的不对称设计。
图2中逆变器直流侧输入功率Pd等于可控损耗ploss与逆变器损耗、机械损耗、杂散损耗之和,电机稳态时后三者变化不大,加之磁链Ψr与励磁电流id是一一对应的关系,则可以近似认为Ψr是id的凸函数。

图2 异步电机矢量控制结构框图
2 控制系统
2.1 系统描述
节能优化控制是由模糊 神经网络控制器实现的。模糊控制是一种非线性控制,对控制对象的非线性特征和参数变化有较好的适应能力,鲁棒性强。模糊控制通过模糊推理,在寻优过程中自适应地调节搜索步长,算法的收敛性和收敛速度优于Rosenbrock法、黄金搜索法等传统的一维搜索方法。Bp神经网络是由静态神经元组成的三层前向网络。他能够实现输入到输出的任何复杂非线性映射,而BP学习算法对神经网络权值的调整具有较强的容错性及自学习能力,经过训练的BP神经网络,对于不是样本集中的输入也能给出合适的输出。
基于模糊控制和神经网络的优点,本文将两者结合起来设计节能控制器。在给定工况(一定的转矩和转子转速)下通过模糊推理在线搜索,使异步电机输入功率最低的最优励磁电流值。最优点一旦找到,电磁转矩、转子转速以及相应的最优励磁电流值将被记录,作为神经网络的训练样本。经过在不同工况下采集的样本的广泛训练后,神经网络能够学习到转矩、转速与最优励磁电流的映射关系,这时神经网络便可取代模糊控制器,无需搜索而对任意工况下的最优励磁电流进行预测。

图3 异步电机运行状态图
这种控制方法可以分为以下几步:
(1)电机启动、收到调速指令或者扰动引起负载变化时,电机采用标准矢量控制,磁链恢复到额定值以满足快速输出所需转矩的要求。
(4)当神经网络经过丰富的典型样本训练之后,就可以取代模糊控制器直接计算最优励磁电流。
2.2 模糊控制器
模糊控制器选取双输入单输出的结构。模糊系统的输入为当前逆变器直流侧输入功率和前一采样时刻功率值的增量,以及前一采样时刻励磁电流增量,经过模糊推理、模糊决策得到模糊输出,再经过解模糊化得到精确控制变量。

图4 模糊控制器结构框图
为了使模糊控制器能够应用于不同功率、不同参数的电机,需要作标幺化处理,将输入输出统一设定到归一化论域(-1,1)。其中功率增量和励磁电流增量的比例因子按照下式得到

比例因子是转速和转矩估计值的函数,能使模糊控制输出的励磁电流对转矩和转速有自适应功能,优化收敛速度。
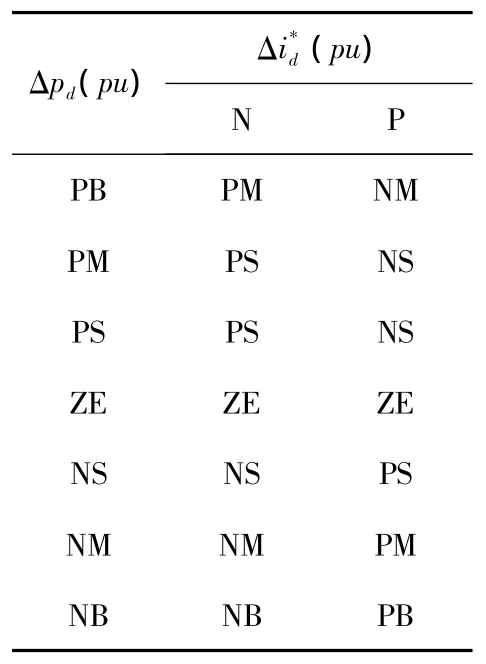
表1 模糊规则库
模糊控制器的输入Δpd(pu)和输出Δ(pu)采用经典的七段划分,自然语言表述为:正大、正中、正小、零、负小、负中和负大,对应的符号语言为 PB、PM、PS、ZE、NS、NM 和 NB。LΔ(pu)只需要区分正负,因此只划分为P或者N。
模糊控制表可以解释为:当上一次励磁电流增量引起输入功率下降时,继续沿相同方向搜索;否则,输入功率上升,沿相反的方向搜索,搜索步长与功率变化成正比。例如最后一条规则

表示,上一次励磁电流正向变化(P),引起输入功率大幅度下降(NB),则继续以大步长增加励磁电流(PB)。
Δpd(pu)的隶属度函数中ZE选用梯形曲线,规定功率增量绝对值减少到一定程度时,终止模糊搜索,避免搜索算法在最优点附近震荡。Δ(pu)=PB的隶属度函数采用不对称结构。从图1可知,损耗曲线是磁链的单谷函数,但是并非关于极值点对称,而是极值点左侧的曲线远比右侧陡峭。因此搜索到左侧区域时,功率对励磁调节会更加敏感。为了避免深度削磁带来的系统不稳定和超调引起的系统振荡,有必要调节模糊控制算法,自动缩减在这一区域的搜索步长。于是如图5(c)所示“压缩”Δpd(pu)右半轴曲线。
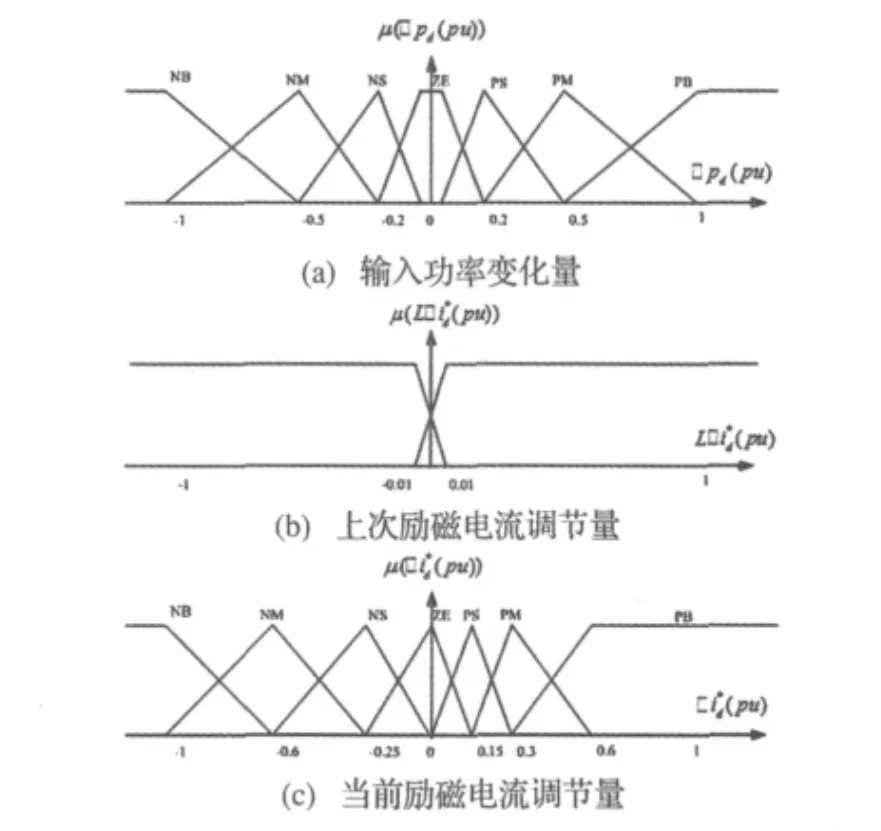
图5 模糊控制器各个变量的隶属度函数
2.3 BP神经网络控制器
对于任意给定工况,转子转速和负载转矩给定,总是存在一个使系统输入功率最小的励磁电流,记对应的最优运行状态为,Te,ωr),由公式(3)知是(Te,ωr)的函数,Rm,Rs,Rr是变参数,而在电机稳态运行时它们都是常量。将最优运行点组成的点集作为训练样本,赋予BP神经网络作曲面拟合,经过广泛的训练,神经网络便能自动学习(Te,ωr)到的映射关系,进而可直接由(Te,ωr)计算任意工况对应的最优励磁电流。
BP神经网络以(Te,ωr)作为两个输入,作为输出。根据Kolmogorov定理,BP神经网络构建中隐含层数目n2=sqrt(n1+m+1)+a,其中n1和m分别为输入层和输出层数目,a为常数且a=1~10。取隐层神经网络单元数位5,各单元激励函数选用Sigmoid函数。BP算法基本思想是应用梯度搜索技术,期望通过调整权值减小输出层的实际值与期望值的误差均方值.在其网络学习过程中,误差一边向后传播一边修正权系数。加权系数的调整采用误差纠正学习规则,为了加快收敛速度,在实际应用中采用自适应调整学习速率的改进δ规则学习算法。神经网络学习和搜索控制同步进行,无需额外的时间,可满足实时控制的要求。
3 仿真分析
基于MATLAB/Simulink环境,对前文设计的控制算法作仿真研究,仿真电机选用 Y100L1-4(额定功率 2.2kW,380V,50HZ,2 对极),具体参数如下:Rs=0.865Ω,Rr=1.39Ω,Ls=Lr=0.8mH,Lm=156mH,Rm=98Ω,J=0.054kg·m2,采样周期Ts=2e-6s,搜索步长0.2s。如图6所示,0s启动电机,负载转矩4.5N·m(0.3pu),给定转速 1100r/min(0.8pu)。前 1.5s秒为电机启动时间,之后电机进入稳态运行。1.5s时加入节能控制算法。由于实施了转矩电流前馈补偿,电磁转矩Te和转子转速n并未发生明显变化。而在1s内转子磁链Ψr从约0.9Wb调节到约0.6Wb,之后保持稳定。输入功率 pd从 830W 下降到730W。
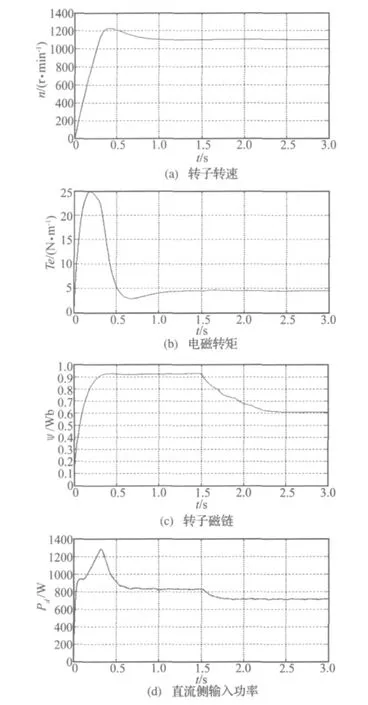
图6 异步电机动态响应
4 结论
本文提出一种新的基于矢量控制变频调速异步电机的节能控制策略。以逆变器直流侧输入功率为控制目标,采用模糊控制方法能够快速稳定地搜索到使电机能耗最低的最优励磁电流。同时将特定工况下获得的最优状态信息(转矩、转速以及励磁电流)作为神经网络的样本集,经过反复训练之后,神经网络能够准确预测任意工况下最优励磁电流。仿真结果证明该方法能具有良好的节能效果。
[1] LIM S,NAM K.Loss-minimizing control scheme for induction motors[J].IEE Proc of Electric Power Applications,2004,151(4):385-397.
[2] 丁宝,孙满意.基于矢量空间最小励磁电流的电机节能研究[J].中国电机工程学报,2006,26(1):142-145.
[3] 刘晓虎,谢顺衣,郑力捷.一种改进的感应电机最大效率控制技术研究[J].中国电机工程学报,2005,25(6):95-98.
[4] 张立伟,温旭辉,郑琼林.异步电机用混合式模糊搜索效率优化控制研究[J].中国电机工程学报,2007,27(27):83-87.
[5] Durval de Almeida Souza,et al.Adaptive fuzzy controller for efficiency optimization of induction motors. IEEE Trans. Ind. Electron.,2007,54(4).
[6] 徐占国,邵 诚.基于模糊技术感应电机最大效率控制策略的研究[J].控制与决策,2009,24(5):743-748.
[7] Energy efficient control of three-phase induction motor-a review[J].International Journal of Computer and Electrical Engineering,2009,1(1).
[8] 李健健,刘新正.基于矢量控制的异步电机节能运行的的研究[J].微电机,2010,43(3):14-17.
