双磁棒旋转搜索电磁定位/跟踪的搜索策略研究
2011-01-26王法葛鑫邬小玫
【作 者】王法,葛鑫,邬小玫
复旦大学电子工程系医学电子教研室,上海,200433
1 研究背景和意义
在微创介入手术中,对手术器械进行定位是一个重要课题。相比传统的定位方法,电磁定位/跟踪具有无辐射[1][2],可实现六自由度跟踪[3],无损等优点。但同时存在精度不够高,易受到干扰,数学迭代运算复杂且不够稳定的问题[4]。本研究小组提出的基于双磁棒旋转搜索的电磁跟踪方法[5],利用空间旋转磁棒在指向传感器时可检测到最强磁场这一核心思想,构建了由两个旋转磁棒和一个三轴磁场传感器组成的定位/跟踪系统,可以动态跟踪传感器的位置,同时利用磁感应强度的方向计算确定传感器的空间姿态。此方法不依赖磁场分布的理论模型,且避免了传统电磁定位/跟踪系统所使用的迭代算法,具有搜索速度快,计算量小,可靠性好的优点。
磁棒在空间旋转搜索传感器的策略是影响旋转磁场定位/跟踪性能的重要因素之一。本文的研究即围绕该问题展开。
2 原理和方法
双磁棒旋转搜索磁定位/跟踪系统组成如图1所示[6],包括三轴磁传感器、两个可分别在水平和垂直两个方向旋转以实现空间任意指向的磁棒以及控制装置。其工作过程为:两磁棒通过一定的搜索策略旋转并最终指向传感器,利用磁棒的指向信息以及磁棒指向传感器时,传感器检测到的磁感应强度方向信息,通过几何方法就可计算出传感器的空间位置和姿态,实现三维六自由度的定位和跟踪。可以看出,搜索策略的优劣,将直接影响跟踪性能。
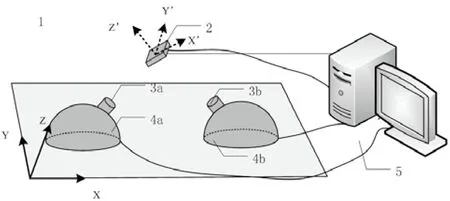
图1 系统组成Fig.1 System components
磁棒搜索的基本思路是,先随机地确定磁棒旋转方向进行试探,若磁棒在旋转后磁传感器检测到的磁感应强度大于旋转前检测到的磁感应强度,则表明旋转方向正确;否则旋转方向错误,需反向搜索。根据这个规则,磁棒先水平后垂直地旋转直至找到磁感应强度最大点,即磁棒指向传感器。若定义磁棒每次旋转的角度为步长,则磁棒旋转步长将对搜索效率和定位精度产生很大影响。
若每次磁棒旋转相同的角度,称之为定步长搜索方法。图2 所示为定步长搜索策略下的搜索过程,实心点表示起点,空心点表示终点。
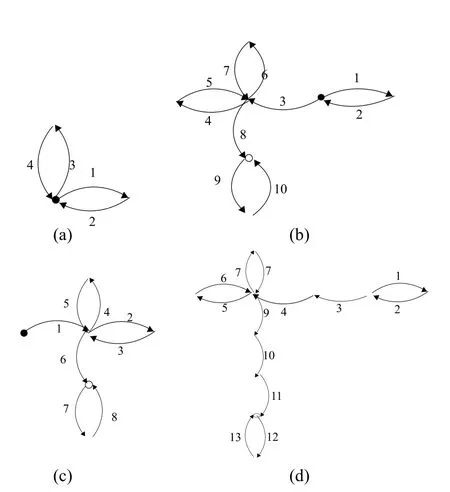
图2 定步长搜索策略下的搜索过程Fig.2 Search process using the fi xed-step method
由图2a可见,目标在没有移动的情况下,需要搜索4步才能确定目标。图2b所示在最不利的情况下,目标移动2步可能需要搜索10步,一般情况下是少于10步的(图2c)。一般地,给出每次最大跟踪步数和目标移动的关系为:

在公式(1)中,△x和△y分别为跟踪目标水平和垂直方向上的移动距离(步长单位为长度),加大步长可以提高搜索效率。如图2d所示,若将搜索步长增加一倍,则搜索步数可以相应减少。但是在通过增加搜索步长而提高搜索效率的同时,会降低定位精度,如图3所示。
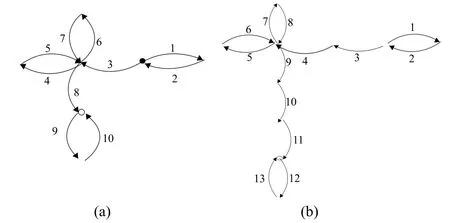
图3 搜索步长与定位精度的关系Fig.3 The balance of step and precision
图3a实心点为跟踪目标起始位置,空心点移动后的位置,三角形点为搜索到的位置。较大的搜索步长可以让磁棒较快对准目标的附近区域,但同时磁棒很难完全对准跟踪目标,造成比较大的定位误差。
图3b实心点为物品起始位置,空心点为移动后的位置。比较小的步长可以让磁棒较为精度地对准目标,但需要更多的步数,这就意味着更长的搜索时间。
针对定步长搜索策略所存在的搜索效率和定位精度的矛盾问题,本文提出了一种自适应的步长搜索策略。其基本思路是在大步长(基础步长的4倍或2倍)粗搜的基础上,再进行小步长(基础步长)细搜,这样就可以在保证定位精度的情况下,提高搜索效率。其搜索过程如图4所示。
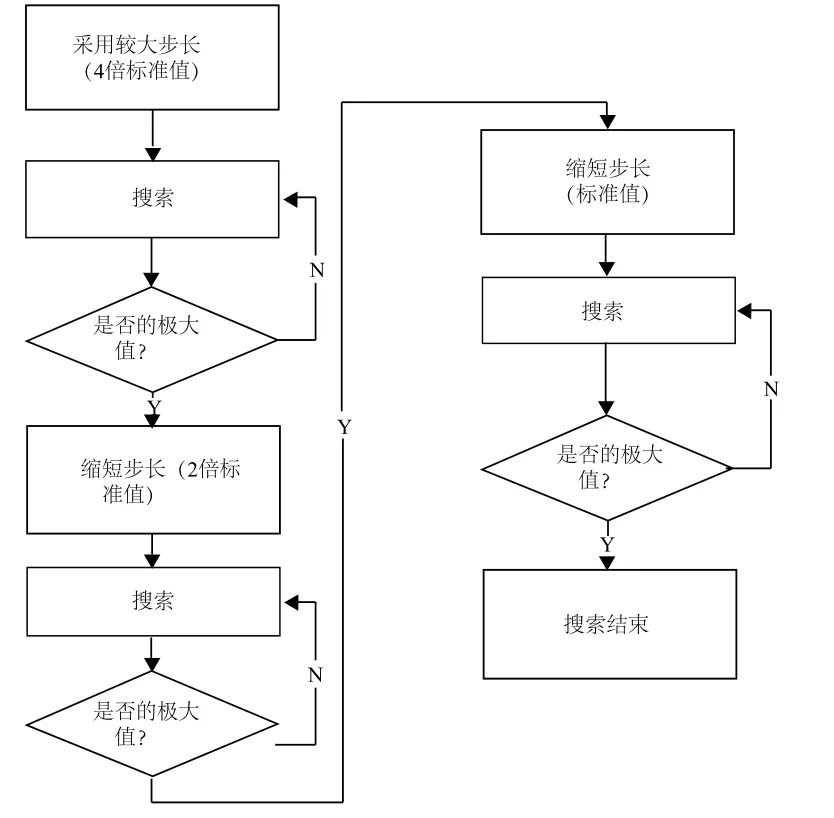
图4 自适应步长策略搜索流程Fig.4 Flow chart of self-adaption step search method
一般地,可以给出自适应步长与目标移动的关系:

式中方括号表示取整,其中各相关符号的定义与公式(1)相同。
比较公式(1)和公式(2)可以看出,自适应步长在目标距离比较远时,可在保证一定定位精度的前提下,大大降低搜索所需步数,从而提高搜索效率。其性能分析如图4所示。由图5可见,当目标与搜索起点距离为>5步时(即>12-8),自适应步长搜索效率比较高。
3 系统仿真与性能评估
有限单元法可通过数学近似的方法,将连续的通电线圈的磁场分布抽象为一组离散的磁感应强度的组合体。本方法利用ANSYS,模拟了通电磁棒的空间磁场分布,并在matlab的平台上仿真了磁棒的搜索定位过程。通过随机给定目标位置和姿态,仿真计算定位/跟踪的位置和姿态的误差,以及搜索所需的步数,分析搜索策略对系统性能的影响。分别仿真研究了定步长搜索策略中步长为0.5o、1o情况下的定位精度和搜索效率,以及自适应步长搜索策略中基准步长为0.5°情况下的定位精度和搜索效率。图6所示为上述三种情况下空间位置误差的仿真结果;图7为三种情况下空间姿态误差的仿真结果;图8则为三种情况下搜索步数的仿真结果。
从图6可以看出,自适应步长的位置误差和0.5o的固定步长非常接近,最大误差都在10mm以内,平均误差在0.5 mm之内。而1o的固定步长的最大位置误差则接近20 mm,平均误差在1 mm左右。
由图7可以看出,在方向误差上,自适应步长也有较高的精度,跟0.5o固定步长很接近,都分布在2o之内,均值在0.3o;1o固定步长最大方向误差接近4.5o,均值为0.5o。
由8图可以看出,自适应步长在搜索所需步数比两种固定步长方法都有优势很大,最大搜索步数仅仅为24,比固定0.5o步长的250步和固定1o步长的55步都有很大提升。并且自适应步长步数分布均匀,每次搜索时间相对接近。
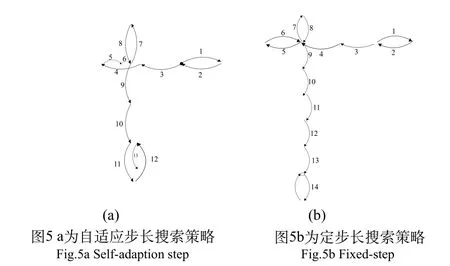
图5 定步长和自适应步长搜索策略下的搜索过程比较Fig.5 Comparison between the search processing using fi xed-step and self-adaption step.
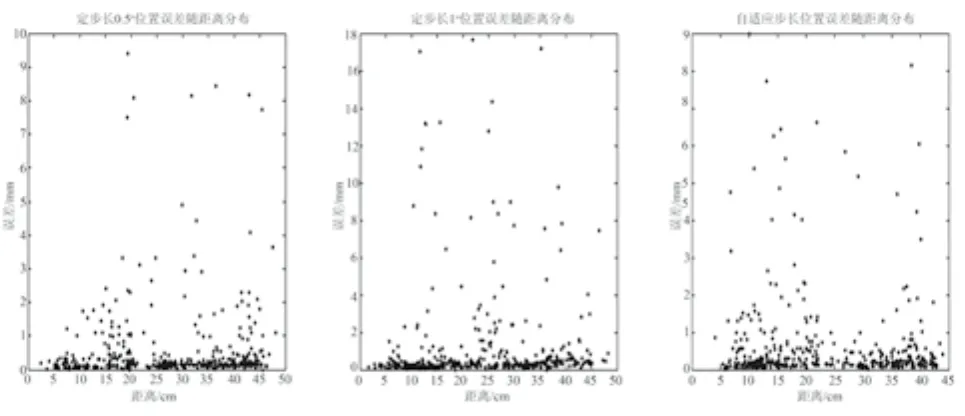
图6 三种步长位置误差随距离分布Fig.6 Position error distribution with distance using three different search method
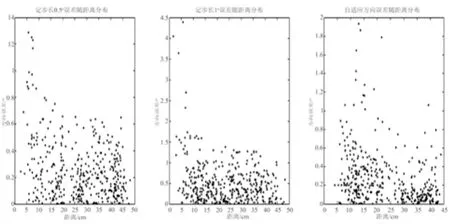
图7 三种步长方向误差随距离分布Fig.7 Orientation error distribution with distance using three different search method
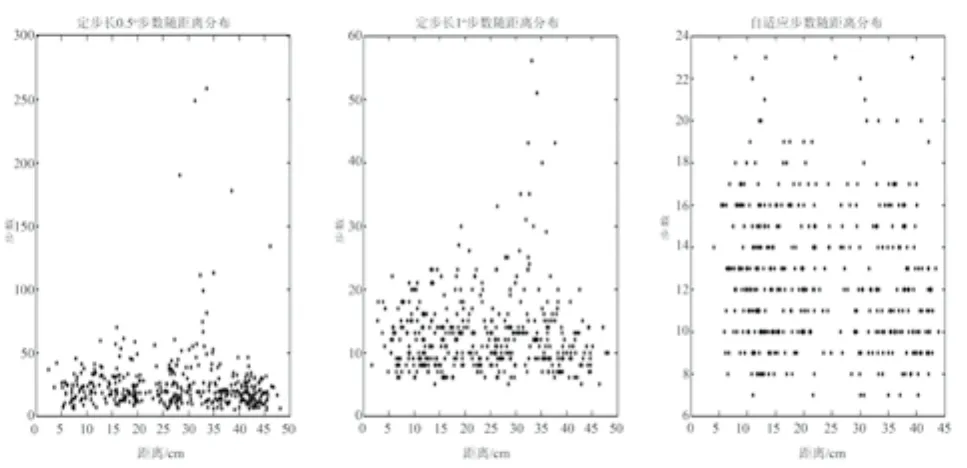
图8 三种步长步数随距离分布Fig.8 Step number distribution with distance using three different search method
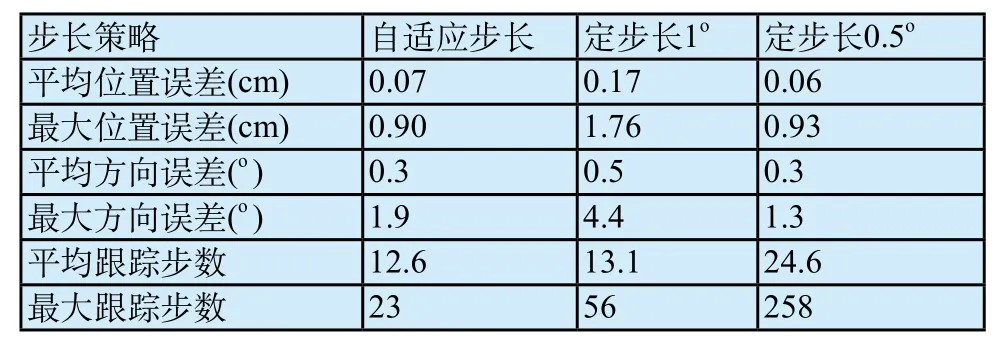
表1 三种搜索步长的仿真结果Table 1 The result of emulate three search methods
由表1可以得出结论,自适应步长在具有与固定步长0.5o相近精度的同时,大大降低了搜索所需步数,提高了搜索效率。
4 结果与讨论
本研究结果表明,自适应步长搜索方法可以在保证定位精度的前提下,能有效提高搜索效率。本研究仿真时采取的近距离(0到25 cm)1o,远距离(25 cm到45 cm)为0.5o的基准步长,但可根据定位/跟踪范围及对精度和效率的要求,进行更具体的设计。
[1] Kuipers J. Object tracking and orientation determination means,system and process[P], US, 3868565, 1975-2-25
[2] Raab F H. Remote object position locater[P], US, 4054881, 1977-10-18
[3] Govari A. Electromagnetic position single axis system [P], US,6484118, 2002-11-19
[4] Schneider M. Measuring position and orientation using magnetic fi elds[P], US, 6073043, 2000-06-06
[5] Xin Ge, Dakun Lai, Xiaomei Wu, et al, A novel non-modelbased 6-dof electromagnetic tracking method using non-iterative algorithm [C]. 31st Annual International Conference of the IEEE EMBS.Minneapolis, Minnesota, USA, September 2-6, 2009
[6] 葛鑫, 邬小玫, 方祖祥,等.一种基于双磁棒旋转搜索的电磁跟踪方法及系统[P]. 中国, 201010179332.2, 2010-05-20
