集成电机推进器构型及特点分析
2011-01-20郑珂
郑 珂
(中国舰船研究院,北京 100192)
集成电机推进器构型及特点分析
郑 珂
(中国舰船研究院,北京 100192)
集成电机推进器(IMP)是一种新型的水下电动力推进装置,通过一种典型IMP构型介绍了其工作原理、结构,并分析其技术特点及发展趋势,认为集成电机推进器有较好的发展和应用潜力。
集成电机推进器(IMP);直流无刷电机;泵喷射推进器;无人水下航行器(UUV)
0 引言
科学技术的发展,使无人作战平台在未来现代化战争中将扮演越来越重要的角色,成为兵力的倍增器。无人水下航行器(Unmanned Underwater Vehicles,UUV)作为一种水下无人作战力量,受到各国海军的追捧,也得到了飞速的发展。
集成电机推进器(Integrated Motor/Propulsor,IMP),是将电机移出航行器壳体外直接同推进器组合的一种全新概念的推进装置,具有高功率密度、安静、高效率等特点,特别适用于UUV推进。
1 一型IMP构型简介
本文以一型UUV用IMP为例(见图1),就其构型及工作原理进行阐述。
1.1 推进器
该IMP采用单转桨导管推进(即泵喷射)方式,主要由转子、定子和导管(导流罩)3部分组成。电机通过驱动螺旋桨转子对流体做功,将电能转化为动能,为系统运动提供所需的推力。

图1 IMP系统构成示意图Fig.1 IMP structure
导管可以分成加速导管和减速导管。IMP采用减速型导管,起到减速、增压的效果,从而推迟空泡产生,达到较好的降噪性能。导管外形与航行器尾部结构相匹配,既保证具有良好的流线形,又有足够的空间安装电机定子和其驱动电路。导管设计采用面元法,计算导管流场为转子叶片提供伴流。
IMP的定子装在转子后面,称为“后漩”式泵喷射推进结构,能获取较好的空泡性能,降低噪声。定子除了起扭矩平衡作用外,还为供电电路提供安装空间。设计中建立顶端带环的桨叶和导管尾涡模型,着重考虑稍部和端环模型的载荷修正、气隙尺寸对水动力影响。转子和定子采用升力面理论涡格法设计,进行流场分析和水动力性能预报。叶数选取必须避开伴流谐波高峰数。
转子和定子的设计采用NACA系列翼型,设计时保证在设计点附近较宽的升力或迎角范围内,翼型都应具有良好的空化特性和流体动力特性。
材料的选取考虑重量(在考虑强度、低噪声的基础上)的因素,导管材料选用铝合金,转子螺旋桨采用非金属材料。IMP的特殊结构加之材料的选择使其重量远远低于传统水下航行器电机+轴承+螺旋桨的总重量。转子轴承采用了水润滑轴承,减少油润滑轴承的密封环境。
1.2 电机
IMP采用了高能量密度的永磁无刷电机(BLDCM);在电机的构型上采用在螺旋桨叶片上加永磁体端环,电机定子安装在导流罩内的方式。
IMP的流体性能要求电机结构尺寸越薄越小越好,因此要减薄电机定转子的厚度,通过增加电机的极对数,提高电机的电磁负荷。
由于IMP对流体特性的要求,所以电机构型采用不同于普通电机的“锥形电机”(见图2),即电机定转子呈锥形,可见,该IMP的驱动电机定转子及气隙线型不是常规的相对转轴平行,而是相对转轴呈一定斜角。

图2 IMP锥形电机设计草图Fig.2 Sketch of IMP cone-shaped motor
电机控制中,主功率模块采用智能功率模块IPM,控制器采用DSP。考虑水流会对电机的转矩产生较大的波动,不适合无传感器方案,所以采用带霍
尔位置传感器的控制方式。
2 特点分析
IMP是满足UUV安静、远程、高性能等要求的重要技术途径,因其具备的主要特点成为未来的发展方向。
2.1 节省空间、减轻重量
水下航行器设计中的一个重要约束条件就是体积和重量。UUV设计中追求的远航程、多装设备、多装载荷等问题,都与其体积和重量密切相关。
IMP安装在航行器的外部,这样省去了传统推进系统需要的联轴节等传动装置,节省空间、减轻重量,同时提高了电机功率密度。以某型水下航行器为例,如果换装IMP,其推进装置重量可减轻约60%;节省的空间如果用于加装电池,可多装25%以上。
2.2 降低噪声
目前水下探测最常用和最有效的方式是声探测。降低推进器噪声不仅可以降低水下航行器被探测的概率,而且可提高自身声呐作用距离。
由于IMP在水下航行器尾部同壳体只有1个联接接口,从而大幅消除了内置电机与壳体联结产生的振动噪声;由于不需传动机构,也消除了传动机构产生的磨擦噪声;集成电机定子同时又是螺旋桨导流罩,可推迟螺旋桨叶片空泡起始并屏蔽转子旋转产生的流噪声,这是一种真正意义上的安静性推进装置。
2.3 提高效率
IMP采用的泵喷射推进方式在效率方面会比传统的对转桨推进低约4%~6%;IMP的特种电机在效率上与传统电机基本一致;同时,采用传统推进装置的水下航行器传动轴与壳体之间均需要动密封处理,特别是低速航行器在动密封环节的效率损失约占到5% ~10%,而IMP避免了此动密封环节,省去了效率损耗;由于IMP始终在海水环境中工作,它所产生的热量可以通过水流进行自然散热冷却,从而可使结构更加紧凑,提高了装置的比功率和效率;加之IMP省去了传统推进的传动环节,所以IMP在效率方面较传统推进,尤其在低速航行器,有一定的优势。
2.4 提高保障性
IMP提高了无人水下航行器的可靠性、安全性和维修性。这是因为其取消了独立的传动机构和轴密封装置,避免了泄漏、轴承等主要故障源。零部件的减少也降低了维修量。此外,IMP作为一个整段可以方便地从尾部拆下维修,并可随时换装,这就降低了反复试验和训练之间的维修成本,缩短了周期[3]。
美国海军水下战中心开发了1个正浮力轻型鱼雷试验床原型,以验证IMP等关键技术和性能。在2006年7~8月期间,在美国海军水下战中心的靶场成功地进行了39条次实航试验,虽然在试验中检查了油压,但在39个条次中未进行任何维护[1],显示了条次间技术准备的简易性。有时在8 h内连续完成6个条次,每个条次间的技术准备时间只有38 min[3]。
2.5 IMP带来的新问题
任何事物均有其两面性,IMP同样也会带来以下一些新的问题:
1)由于电机的定子安装在导流罩内,导流罩厚度受到限制,对航行器整体流场产生影响,增加了航行器的阻力。
2)在浅吃水航行时,特别是沙砾较多的水域,会存在将碎石和沙砾吸入系统的危险[4]。
3)可能给航行器带来重心后移、与鳍舵匹配等问题,需要在航行器总体设计中加以考虑。
4)电机在水中工作,存在新的绝缘和防蚀问题。
3 发展趋势
IMP如何适用于大功率推进是目前需要重点研究和攻关的问题。电机产生足够强度、高质量的旋转磁场需要大的安装空间,导流罩需要较好的水动力外形,同时还要保证为螺旋桨转子、定子提供良好伴流条件,所以,IMP的大功率及集成化的优化设计是将来发展的重点。
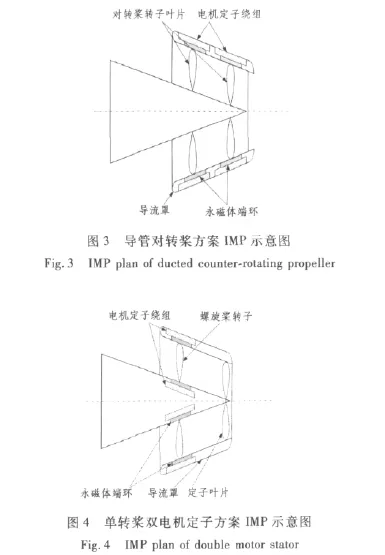
研究UUV用大功率IMP,笔者有2种构型方案:一是采用导管对转桨IMP方案(如图3),即在导流罩内集成2套电机定子绕组,分别驱动2套螺旋桨转子,实现导管对转桨的方案,这样能较大提高推进器功率;二是仍采用单转桨方案(如图4),螺旋桨转子的内、外缘各安装1套永磁体转子端环,在导流罩内和尾段壳体内各对应集成1套电机定子绕组,实现功率翻番的目的。进一步考虑,甚至可以将此2种方案一并使用获取更大的功率。
总之,IMP由于其结构新颖,具有低噪声、高效推进、可为能源/载荷提供较多携带空间等突出优点,使其在军事和民用上都拥有广阔的应用前景。IMP可应用于电动力鱼雷、UUV、自航水雷、蛙人运载器、水下运载器等武器和平台,甚至经过研究发展可用于潜艇推进。
[1]DUBOIS N J.Rechargeable electric propulsion for lightweight torpedoes[R].Europe UDT,2007.
[2]张强,程鹏,张敬南.无刷直流电动机在集成电机推进器中的应用及设计[J].微特电机,2010,38(3):16-17,23.
[3]钱东,崔立,薛蒙.美国新一代电动力轻型鱼雷研发策略分析[J].鱼雷技术,2007,15(6):1-4.
[4]刘文峰,胡欲立.新型水下集成电机推进装置的泵喷射推进器结构原理及特点分析[J].鱼雷技术,2007,15(6):5-8.
[5]钱东,孟庆国,薛蒙,张少悟.美国海军UUV的任务与能力需求[J].鱼雷技术,2005,13(4):7 -12.
Analysis of construction principle and characteristics of integrated motor/propulsor
ZHENG Ke
(China Ship Research and Development Academy,Beijing 100192,China)
Integrated motor/propulsor(IMP)is a new type of underwater electrical propulsor.The mechanical structures,working principle,technology features and development of the IMP are introduced.IMP is an important tendency of development of the underwater electrical propulsor.
IMP;brushless DC motor;pump-jet;UUV
V43
A
1672-7649(2011)06-0096-03
10.3404/j.issn.1672-7649.2011.06.022
2011-05-06
郑珂(1981-),男,硕士,工程师,主要从事水下无人航行器研究。
