国外潜艇作战系统发展综述
2011-01-20张仁茹左艳军高天孚姜典杰邓尧文
张仁茹,左艳军,高天孚,姜典杰,邓尧文
(1.中国舰船研究院,北京 100192;2.中国船舶重工集团公司第七一四研究所,北京 100192)
国外潜艇作战系统发展综述
张仁茹1,左艳军2,高天孚1,姜典杰1,邓尧文1
(1.中国舰船研究院,北京 100192;2.中国船舶重工集团公司第七一四研究所,北京 100192)
重点阐述国外典型潜艇作战系统的体系结构、系统组成等,分析了潜艇作战系统的技术特点,归纳总结了国外潜艇作战系统的发展趋势。
潜艇;作战系统;发展趋势
0 引言
潜艇作战系统是指潜艇平台上用于执行警戒、跟踪、目标识别、数据处理、威胁估计及控制武器完成对敌独立或协同作战的各要素及人员的综合体。潜艇作战系统主要由声呐、导航、通信、作战指挥及武器控制、雷达、电子侦察、光电等分系统和设备组成。随着信息技术的发展与推动,自20世纪90年代以来,各海军强国纷纷开发技术更先进、功能更强大的新一代潜艇作战系统。通过对这些典型系统进行跟踪研究有利于把握世界潜艇作战系统的未来发展方向与趋势,为国内开展潜艇作战系统研究提供借鉴和参考。
1 潜艇作战系统发展现状
20世纪90年代以来,世界各海军强国纷纷开发了新一代潜艇作战系统,技术水平领先,其典型技术体制和性能特点代表了潜艇作战系统的未来发展方向。表1列出了美欧几个海军强国最新的典型潜艇作战系统型号及装备情况。
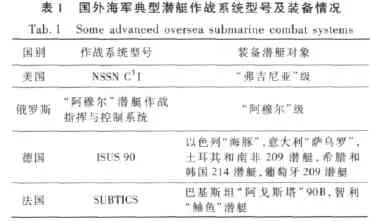
?
1.1 美国NSSN C3I系统
NSSN C3I于1996年5月由LMFS、雷西昂系统公司和诺斯罗普·格鲁曼公司研制,首套系统于2001年在“弗吉尼亚”级潜艇上完成了安装和集成。该系统代表了美国潜艇作战系统的最新发展方向[1]。
NSSN C3I系统采用ATM/SONET光纤局域网构建了分布式体系结构(见图1),该系统由声呐系统、指控系统、结构子系统、PBS-15雷达、电子战支援子系统、舰艇控制子系统、全舰监视子系统、战术支援设备子系统、潜艇区域战子系统、外部通信子系统、导航传感器系统、图像子系统、内部通信子系统、海军战术处理子系统和特殊用途子系统共15个子系统组成。
该系统装备了性能优异的传感器,包括4.575 m球形舰首阵、轻型宽孔径阵、高频探测阵、高频导航阵、TB-16拖曳阵、TB23/TB29拖曳线列阵和辅助声呐。
系统装备了威力强大的武器,包括“战斧”对陆攻击导弹、“鱼叉”反舰导弹、MK48 ADCAP鱼雷和先进的MK60 CAPTOR水雷以及无人潜航器等。
系统配有AN/UYQ-70多功能通用显控台,具有X-windows图形环境,能为用户提供图形、视频、雷达扫描转换和商用接口模块,所有作战部门可共用。
系统采用POSIX操作系统,且支持软件移植和实时应用(包括互操作性)。在系统软件中还采用了很多最新软件技术,如图像软件、通信软件、通用“战斧”巡航导弹软件等,其中76%为COTS产品。
NSSN C3I系统具有以下特点:
1)全开放的分布式体系结构
系统采用ATM/SONET光纤局域网构建全开放的分布式体系结构,主干网速达到了2.5 Gb/s,系统构建时采用了大量COTS产品,其中COTS硬件和软件应用比例分别达到了78%和76%。系统硬件和软件中间件实现了标准化,软硬件可以根据作战系统需求在功能上进行灵活重组,重用度很高。
2)态势感知能力强
NSSN C3I系统装备了一体化声呐系统,声传感器功能强大,一体化声呐信号处理能力强,能同时综合水下、水面和机载传感器信息,具有很强的态势感知能力,完全满足“弗吉尼亚”级潜艇在复杂浅海环境下的作战需求。
3)支撑协同作战
NSSN C3I系统拥有水声、综合浮标、卫星、数据链等多种连通手段,实现了与水面舰艇、飞机以及其他作战平台的协同信息交互和实时共享,重视与国家级C4ISR系统的链接,完全兼容美国联合海上指挥情报系统(JMCIS),有效地支撑潜艇与各作战平台和军种的协同作战。这完全符合美国网络中心战[2]中对海军潜艇作战平台的作战能力要求[2-3]。
4)能对多武器装备进行综合控制
NSSN C3I中指控分系统集成了“战斧”巡航导弹、各型鱼雷的火控功能,4台多功能显控台可完成12管垂直发射巡航导弹和4管水平发射鱼雷以及无人潜航器的发控操作。
5)作战网与平台网融为一体
NSSN C3I系统主干网络集成了传感器、武器、指控、全艇监视、内通、外通、导航、潜艇控制及平台控制等系统和设备,实现了作战系统网络和平台系统网络的有效融合,全艇信息化能力得到大幅提升。
1.2 俄罗斯“阿穆尔”级潜艇作战系统
俄罗斯“阿穆尔”级常规潜艇作战系统采用分布式体系结构,装备了高度自动化的作战指挥与控制系统。该系统基于俄罗斯的控制系统理论,将作战情报处理、作战决策、武器控制、本艇操艇机动控制以及动力系统的控制等功能进行了综合。
该作战指挥与控制系统由包含8个多功能控制台、监控设备、技术装置控制备份设备、鱼雷管监控设备、武器与自防御诱饵辅助控制备份设备等62个仪器组成,如图3所示。
系统具有如下主要功能:
1)控制艇上通用系统和主动力装置,监视平台装置与居住参数,为作战辅助决策和模拟训练提供信息支持;
2)综合信息显示,作战及战术态势预测,不同作战态势下使用专家系统进行决策信息支持,潜望镜控制,通过潜望镜观察电视图形;
3)集中收集、处理与显示环境数据,分析作战态势,显示战场态势、确定射击阵位、自动解算多批目标运动要素,为武器与自防御诱饵使用提供目标指示,控制武器发射。
俄罗斯“阿穆尔”级潜艇作战指挥与控制系统具有以下典型特点:
1)分布式体系结构。系统采用了新型计算机、数据总线、数据库等技术构建了分布式作战系统体系结构。
2)一体化程度高。该系统一体化程度高,在主控室内安装有全自动的管理系统,自动控制系统可确保艇员对潜艇进行集中而有效的操控,艇员只需通过主控室内的多个彩色多功能控制台便可操作艇上的所有系统。
3)综合武器控制能力强。系统1次可跟踪20个目标,并同时对其中最有威胁的6个目标发动攻击。装有6具具有单射和齐射等组合功能的533 mm鱼雷发射管,可综合控制所有鱼雷和巡航导弹的发射,同时,还具有外挂布雷能力和多种声对抗防御器材,可灵活地执行各种战斗任务。
1.3 德国ISUS90潜艇作战系统
ISUS90作战系统是由德国STN-ATLAS公司研制的最新型作战系统,该系统在继承ISUS83作战系统模块化技术基础上,更多地采用COTS技术,强调性能更优、可靠性更高、体积更小。该系统已在“海豚”级、“萨乌鲁”级、209型、212A以及214型等多型潜艇上应用。图4为ISUS90作战系统体系结构。
ISUS90系统具有以下特点:
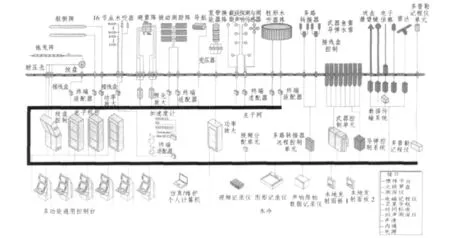
图4 德国ISUS 90潜艇作战系统体系结构Fig.4 ISUS 90 submarine combat system architecture
1)ISUS90系统采用了双冗余以太网构建分布式体系结构,系统具有典型的网络化、层次化特征,实现了所有作战系统要素全部上网,信息关系扁平化特征明显;
2)艇载的各类传感器、指控系统、武器系统、导航及各种支持功能由标准的硬件和软件部件集成;
3)全系统范围内具有统一的人机接口,使用高清晰度多功能通用显控台,每个多功能通用显控台的任务整体可互换;
4)采用了数字基阵技术,能由声呐电子机柜中的信号处理机完成多声阵信号统一的自动探测、跟踪、分析等处理;
5)综合了攻击潜望镜、雷达、ESM等非声传感器的控制和运行,并通过优化鱼雷和导弹的控制及导引,实现先进的指挥控制功能;
6)对所有的关键任务进行了冗余设计,系统生命力强。武器装备配置了相应的本地发射面板,保证备用工作方式下的系统基本作战功能;
7)具备统一的面向对象的数据库系统,可以对各类目标特征数据库、本艇特征数据库等数据库进行存储、加载、下载等管理。
1.4 法国SUBTICS潜艇作战系统
法国SUBTICS潜艇作战系统由DCNS和汤姆逊-辛特拉CSF公司组成的UDS国际联合公司研制和生产。该系统被广泛应用在“阿戈斯塔”90B、“鲉鱼”等型潜艇上。
SUBTICS的核心是1个开放式模块化体系结构。这些模块包括探测、跟踪、分析与定位处理模块,目标运动分析、分类、识别和航迹管理处理模块,综合导航系统数据处理模块,态势评估模块、决策指挥模块和交战与发射模块。目前,在SUBTICS的基础上法国又研制并生产了更新的SUBTICS潜艇战术综合作战系统,系统提供多种类的数据综合,艇员能连续掌控目标监视、威胁评估和武器发射的态势信息。图5和图6为SUBTICS潜艇作战系统。
SUBTICS潜艇作战系统主要特点如下:
1)采用开放的分布式体系结构和模块化设计,能根据作战需求对各模块进行灵活配置。同时各模块还能在生命周期内根据新任务进行不断升级,保持潜艇水下作战优势;
2)采用声呐一体化设计技术,声呐系统具备先进的探测性能;
3)集成了多种数据链,能与其他作战平台进行有效的协同,完成各种类型的联合作战任务;

图5 法国SUBTICS潜艇作战系统示意图Fig.5 SUBTICS submarine combat system
4)作战网络独立于平台网,作战系统主干网采用快速冗余以太网,声传感器、非声传感器、导航传感器、武器及诱饵分别自成子网;
5)采用了多功能显控台,艇上所有操纵功能均可通过多功能通用显控台来完成;
6)硬件具有通用性,软件功能可重组,设备间有很强的通用性,因此,潜艇作战系统站位的复用程度高,艇员战位配置减少。
2 潜艇作战系统发展趋势
通过对国外先进国家潜艇作战系统的分析,未来潜艇作战系统的发展趋势可以归纳为以下几点:
1)采用开放式的分布式体系结构
开放式的分布式系统结构为潜艇作战系统提供了一种宽松耦合的连接环境,各分系统之间采用标准化接口定义,分系统之间访问直接通过中间件接口实现,具有良好的互操作性和更明显的网络化和层次化特征。这利于更多地引入COTS技术,节约成本;确保每个分系统都能进行技术升级而对整个系统影响不大,保证系统在交付时能反映当时的最新技术水平;有利于系统硬件与软件、数据与应用分离,促进软硬件通用化、标准化程度不断提高[4-5];有利于增强设备间的通用性,进而提高潜艇作战系统站位的复用程度,减少艇员配置,提高潜艇作战系统效能。
2)一体化程度更高
潜艇作战系统能完成声呐系统的一体化设计和信息的综合处理,完成指火控一体化设计,鱼雷、导弹武器控制高度集成,充分体现潜艇“集中指挥、综合控制”的作战思想。同时,潜艇作战系统网络将进一步综合潜艇上的所有电子装备,系统集成化程度高,战位配置简洁。作战系统网络、通信系统网络、平台管理系统网络等将会通过统一技术体制、统一标准规范得到进一步整合,作战系统上网设备间,作战系统网络与通信系统网络、平台管理系统网络间的信息能互联互通,在网络上各系统相互之间能有效传递所需信息,艇内信息实现了充分共享,潜艇信息化水平整体能力将会不断得到提升。

图6 法国SUBTICS潜艇作战系统体系结构Fig.6 SUBTICS submarine combat system architecture
3)支持多平台协同作战
在网络中心战概念的引导下,随着信息技术的不断进步,潜艇通信向大深度发展,隐蔽性进一步提高;潜艇水下通信向双向高速率发展,水下协同信息传输能力不断增强;潜艇具备卫通、浮标等多种通信手段,对潜指挥通信的顽存能力不断提高。未来潜艇作战平台会更有效地实现与其他作战平台间的信息共享,能不断扩大获取的信息量和信息范围,在有效实现单艇隐蔽作战的同时,还能更好地发挥潜艇在网络中心战中海军作战网络中的节点作用,与其他作战平台更好地协同。
4)智能化程度不断提高
随着新型传感器技术的应用,潜艇对外部平台信息的隐蔽接收能力的增加,信息融合和综合处理能力的逐步提高,潜艇作战数据库的不断累积,潜艇作战系统能对未来战场态势做出更为清晰的分析判断,经过作战系统综合处理后的目标数据将具有更高的可信度,从而使辅助决策指挥算法更好地发挥作用,为潜艇艇长的决策指挥提供更加可靠的辅助决策支持。
3 结语
潜艇是执行特定海域封锁任务以及对抗航母编队并可对其远程打击的重要手段,先进的潜艇作战系统能有效地提升潜艇水下单独作战能力和与其他作战平台的协同作战能力。本文分析介绍了国外潜艇作战系统的现状和发展趋势,为国内开展相关研究提供借鉴参考。
[1]赵莲芳,新型攻击型潜艇C3I系统体系结构分析[J].情报指挥控制系统与仿真技术,2001,(1):10-22.
[2]ALBERT D S,CARSTKA J J,et al.Network centric warfare[M].2nd Edition,US Library of Congress,1999.
[3]赵祖铭,潜艇指控系统技术和发展分析[J].指挥控制与仿真,2007,(2):1 -9.
[4]黄坤,徐俊,闵绍荣,潜艇作战系统站位复用技术初探[J].中国舰船研究,2009,(5):63 -66.
[5]黄坤,闵绍荣,基于构件的潜艇作战系统软件体系结构[J].中国舰船研究,2009,(2):65 -70.
Development of oversea submarine combat system
ZHANG Ren-ru1,ZUO Yan-jun2,GAO Tian-fu1,JIANG Dian-jie1,DENG Yao-wen1
(1.China Ship Research and Development Academy,Beijing 100192,China;2.The 714 Research Institute of CSIC,Beijing 100192,China)
An architecture of and some compositions of some typical overseas submarine combat systems are addressed.The technology characteristics of them are analyzed.The development trends of them are summed up.
submarine;combat system;development trend
U674.76
A
1672-7649(2011)06-0011-05
10.3404/j.issn.1672-7649.2011.06.003
2011-05-06
张仁茹(1963-),男,研究员,从事指挥自动化和控制研究。
