高速公路汽车智能防撞系统研究
2011-01-12车威
车威
(1.黄淮学院 电子科学与工程系,河南 驻马店 463000;2.武汉理工大学 汽车工程学院,湖北 武汉 430070)
高速公路汽车智能防撞系统研究
车威1,2
(1.黄淮学院 电子科学与工程系,河南 驻马店 463000;2.武汉理工大学 汽车工程学院,湖北 武汉 430070)
高速公路的交通事故中,车辆追尾事故占很大一部分.发生车辆追尾事故的主要原因是车间距离不足.设计了一个汽车智能防撞系统,主要通过车间距离的自动报警提示和强制减速达到安全驾驶的目的.
高速公路;车间距离;智能防撞;强制制动
近年来,随着我国经济的发展,道路交通发生了很大的变化.截至2009年底,我国汽车保有量已达7619.31万辆,高速公路通车里程达6.5万公里.公安部交通管理局发布的全国道路交通事故情况显示,2009年全国共发生道路交通事故238351起,共造成67759人死亡,275125人受伤,直接财产损失9.1亿元,这些数字虽然较2008年都有所下降,但是损失还是非常惨重的.追尾事故在高速公路交通事故中所占比例最高,而追尾事故发生的主要原因就是驾驶员未能保持安全的车间距离.因此,设计一个智能防撞系统显得很有必要.本文所设计智能防撞系统的基本思想是:当车间距离不足时,系统提醒驾驶员减速,若驾驶员不采取有效措施,则系统自动执行减速操作直到车间距离超过安全距离.
1 系统的基本组成
所设计汽车智能防撞系统由4部分组成,如图1所示.
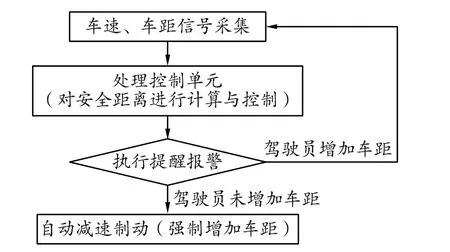
图1 汽车智能防撞系统组成框图
信号采集单元的作用是通过车速传感器测出当前车速,通过测距雷达测出自车与前车距离.处理控制单元的作用是测出实际车距,并根据当前速度计算出安全距离,再将两距离进行比较.当车辆间距离小于规定的安全距离时通过报警信号提醒驾驶员减速以增大车距.自动减速制动单元的作用是当报警信号发出后若驾驶员未采取有效措施,则系统自动执行减速操作.
2 制动防抱死系统(ABS)的改造[1]
当测距雷达测量出车辆与前车的距离达到危险报警距离时,若驾驶员仍未通过踩制动踏板、松油门等措施增加车辆间距,系统必须自动启动强制刹车系统,并保证车辆不发生抱死.当车间距离增大到安全距离后,强制制动系统解除,以防止车速降低过多而造成后车追尾.为了强制制动系统正常工作,需要对原有的防抱死制动系统进行改造,改造方法是模拟制动踏板力向制动防抱死系统提供液压力.
辅助强制刹车系统如图2所示.当辅助强制系统工作时,电磁换向阀受微处理器控制向右移动,由蓄能器通过左工作通道提供压力,通过电磁换向阀向系统供油;当需要停止辅助强制刹车时,电磁换向阀向左移动,右通道打开,压力油回到储油室.压力传感器的作用是检测系统油压,当压力油都回到储油室时,压力传感器输出信号变为零,此时电磁换向阀由微控制器控制回到中间位置.蓄能器的压力由定量泵提供,而定量泵的动力由发动机提供.
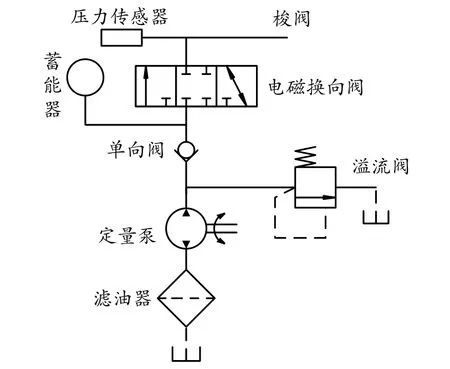
图2 辅助强制刹车系统装置
图3为汽车制动系统结构图,它增加了辅助强制刹车系统.梭阀用于人为制动与辅助强制制动间的转换.当有制动踏板作用时,辅助刹车系统不起作用,这是由于制动踏板产生的液压力大于辅助刹车系统的液压力;当制动踏板不起作用时,辅助刹车系统起作用.一般情况下辅助刹车系统不会干扰驾驶员对车辆的操控,只有驾驶员未采取刹车措施或者刹车力不够时,强制辅助刹车系统才起作用.

图3 汽车制动系统图
3 智能防撞系统的数学模型
行驶于车道后方的车辆称为自车,行驶于自车前方与自车距离最近的车辆称为前车[2].要避免车辆发生追尾,就要时刻保证车辆间实际距离d大于自车车速下的安全距离d0.为了确保数学模型安全可靠,我们取前车静止,后车从制动到静止需要的安全距离这种情况.驾驶员制动的时间分为反应时间和实际制动时间.大多数追尾交通事故是由于车辆间距离过小和驾驶员反应时间过长、行为迟钝造成的,所以将反应时间区分出来可以有效地提醒驾驶员制动.设v1为自车速度,a1为自车加速度(制动减速度),thum为驾驶员反应时间,tx为制动器协调时间,ts为制动减速度增长时间,dw为提醒报警距离,db为危险报警距离,不难推出以下关系:

根据《中华人民共和国道路交通安全法实施条例》第七十八条的规定,高速公路应当标明车道的行驶速度,最低车速不得低于60 km/h,小型载客汽车最高车速不得超过120 km/h,摩托车不得超过80 km/h,其他机动车不得超过100 km/h.本模型中为了提高实用性与安全性,设定最高车速为120 km/h,最低车速为30 km/h.
a1主要与路面附着系数有关,附着系数与制动减速度之间的换算关系如表1所示[3―4].本模型中,对于干燥沥青路面和干燥水泥混凝土路面,a1取6.0 m/s2;对于潮湿沥青路面和潮湿水泥混凝土路面,a1取5.0 m/s2;对于冰雪路面,a1取2.85 m/s2.
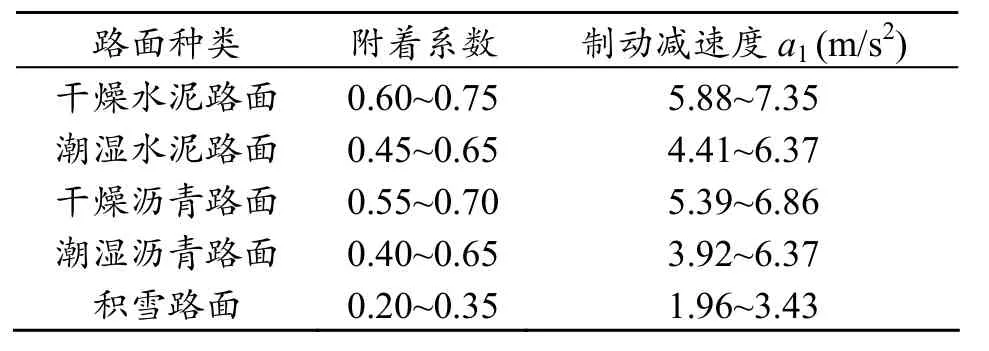
表1 附着系数与制动减速度的换算
根据测定,驾驶员的反应时间thum一般在0.3~1.2 s之间,且性别、年龄等因素对反应时间的影响较大.出于安全驾驶考虑,本模型中thum取为1.2 s.
制动器协调时间tx由制动器的制动间隙和驾驶员踩制动踏板的速度决定[5―6].汽车制动方面的相关资料表明,气压式制动器的协调时间为0.2~0.9 s,液压式制动器的协调时间为0.1~0.2 s.本系统中的tx选为0.2 s.制动减速度增长时间ts主要与制动系统的结构形式有关,在本系统中取0.2 s.查阅国内外资料,高速公路上车辆间的安全距离一般为2~5 m,本系统取最大值5 m.
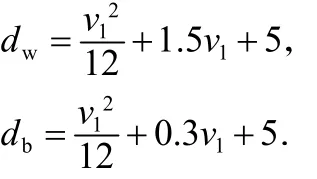
把以上参数代入式(1)和式(2),得干燥路面时提醒报警距离和危险报警距离分别为:
4 智能防撞系统功能的实现
行车过程中,汽车智能防撞系统通过安装在自车前端的测距微波雷达,实时地测出自车与前车距离,并把该距离送到处理控制单元进行处理,与当前速度下的提醒报警距离、危险报警距离进行比较,当实际车距大于提醒报警距离时不报警;当实际车距小于提醒报警距离而大于危险报警距离时,进行声光报警;当实际车间距离小于危险报警距离时,系统自动执行强制制动减速,以增加车间距离,直至车距大于提醒报警距离时,强制制动减速解除.该系统可以有效地避免高速公路汽车追尾碰撞事故的发生.
[1] 韩洋.高速公路追尾防撞预警系统研究[D].太原:中北大学,2008.
[2] 战绪庶,王紫婷,战绪仁.一种汽车激光雷达自动防撞微机控制系统的研究[J].兰州交通大学学报,2006,8(4):100.
[3] 朱从坤,裴玉龙.冰雪路面砂盐混合料养护技术与标准研究[J].哈尔滨建筑大学学报,1999(5):102―105.
[4] 陈光武.高速公路追尾碰撞预防报警系统开发研究[D].西安:长安大学,2000.
[5] 李新佳.欧洲智能交通建设情况及启发[J].城市交通,2004(2):58―62.
[6] 陈旭梅,于雷,郭继孚,等.美、欧、日智能交通系统(ITS)发展分析及启示[J].城市规划,2004(7):75―79.
U463.6,TP273.5
A
1006-5261(2011)05-0028-02
2010-09-05
车威(1981―),男,河南驻马店人,助教,硕士.
〔责任编辑 张继金〕
