智能温室大棚系统设计
2011-01-06陈书欣马洪涛
陈书欣,马洪涛,刘 玺
(1.河北科技大学学报编辑部,河北石家庄 050018;2.河北科技大学息科学与工程学院,河北石家庄 050018)
智能温室大棚系统设计
陈书欣1,马洪涛2,刘 玺2
(1.河北科技大学学报编辑部,河北石家庄 050018;2.河北科技大学息科学与工程学院,河北石家庄 050018)
鉴于目前中国温室大棚系统科技水平低下的现状,专门设计了一个采用PC上位机、3G传输装置和嵌入式下位机相结合的智能温室大棚控制系统,该系统可以智能地调节农作物生长所需的各项环境因数,进而使农作物生长更好,产量更高。此外,由于该系统在上位机和下位机间采用了分散控制,相比于集中控制的温室大棚系统,该系统的稳定性和使用的灵活性都得到了显著提高。
智能温室大棚;分散控制;嵌入式;3G
随着社会和经济的发展,人们对物质生活的需求越来越高。中国人口众多,人均耕地面积很少,如何提高农作物产量,实行耕地面积利用率的最大化十分重要。为了提高单位面积上农作物的产量,国内外纷纷提出了自己的智能温室大棚系统设计方案。所谓的智能温室大棚系统设计就是通过现代科学技术手段,调节农作物生长所需的各种环境条件,主要有光照、温度、土壤湿度、二氧化碳浓度这4个环境参数,从而使农作物处于最佳的生长环境中,进而最大幅度地提高农作物的产量[1-3]。
目前,国内外智能温室大棚系统大多采用 PC上位机和单片机下位机相结合的方法。在上位机和下位机之间采用集中控制、有线互联的方式。其原理是首先由下位机采集数据,然后通过串口传送到上位机中进行信息处理,接着把处理完的结果传给下位机,最后再由下位机根据处理完的结果发出控制命令。采用这种处理方法速度较慢,实时性较差。为了满足实时性和复杂性的数据运算,笔者采用了嵌入式RAM作为下位机进行控制,一台单独的嵌入式RAM下位机就能够独立完成其所在区域的数据采集、处理和控制工作。然而,集中控制方法过多地依赖于PC上位机,一旦上位机出问题,整个系统就要瘫痪。针对这个问题,本系统采用了分散控制方法。再者,传统的有线互联的方式只能适用于面积较小且单一的温室,对于面积较大且多个处于不同地方的温室进行控制往往不能实现,因此本系统采用了无线传输的方法。
1 系统总体设计
系统主要由PC上位机、3G传输装置和嵌入式下位机3部分组成,上位机和下位机之间采用了分散控制的方法。其结构框图如图1所示。
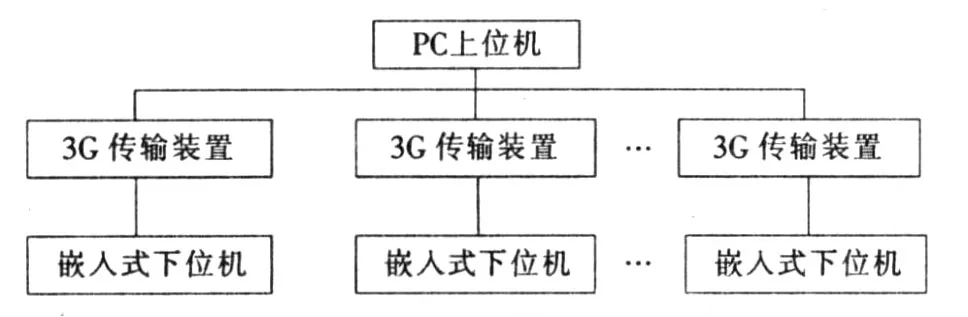
图1 智能温室大棚系统设计总框图Fig.1 System design structure of smart greenhouse
PC上位机用来采集下位机的环境状态参数并对采集到的数据进行显示、分析处理,并把优化后的控制方案提供给管理人员供其参考,管理人员除了可以通过PC机的显示器来实时监控下位机的工作状况外,还可以依据PC机优化后的控制方案向下位机传输不同的控制命令来更新下位机中的各项标准参数。
嵌入式下位机依据PC上位机更新好的标准参数对所管辖范围内的环境参数进行采集、分析处理,最后控制执行机构完成相应的动作。
数据的传输主要由3G传输装置来完成。相比传统的有线连接方式,该方法具有连接方便、控制范围广、使用方便等优点,管理人员即使足不出户也可以对农作物的生长情况进行监控和测量,对农作物的生长环境进行调控。
2 系统的硬件实现
系统的硬件部分主要由PC上位机、3G传输装置和嵌入式下位机3部分构成。
PC上位机部分主要由 PC机、显示器、蜂鸣器组成。PC机主要完成各种功能控制:如对下位机进行数据采集;对采集来的数据进行分析处理后送到显示器进行显示;向下位机传输控制参数,从而完成下位机中标准参数的修改;根据农作物不同的生长季节和时期来对下位机中的农作物生长控制模型进行更新,从而使农作物在不同的季节采用不同的生长控制模型;也可以设置成自动检测报警方式,这样PC机会每隔一定的时间对下位机中的数据进行采集,从而判断下位机所处地点的农作物生长环境是否正常,如果不正常则通过报警器进行报警来通知管理人员。
下位机主要由嵌入式系统、显示装置、采集装置和执行机构组成。嵌入式系统采用的是Samsung公司的S3C2410处理器,它主要用来完成对各个传感器进行数据的采集、处理、显示,并控制相应的执行机构完成相应的动作。此外,它还要对处理后的数据进行压缩,然后发给无线发送模块进行发送。采集装置由温、湿度传感器DHT81、光强传感器TSL2561、二氧化碳传感器MG811组成,用于对各种环境参数进行监控和测量。下位机的处理器首先会依据标准参数对采集来的数据进行处理、优化,最后输出能使农作物生长达到最佳状态的控制信号,从而控制执行机构调节光照、温度、土壤湿度和二氧化碳浓度,进而使农作物处于最佳的生长环境中。
无线传输装置由无线发送模块、3G网络和PC机上的“智能温室控制中心”软件中的数据监控模块组成。无线发送模块先把数据发送到3G网络,3G网络基站会依据用户设定的IP地址把数据上传到互联网上,这样管理员就可以调用“智能温室控制中心”软件中的数据监控模块把数据下载到本地的PC机上进行显示。无线发送模块采用的是联芯科技生产的LC6311芯片,它是一款 TD-HSDPA与 GGE双模3G模块。TD-HSDPA是TD-SCDMA进一步深化的技术,可以适用于WCDMA和 TD-SCDMA两种制式。鉴于目前中国移动推出的 TD-SCDMA早已进入了实用阶段,信号覆盖好,数据传输效果比较好,所以选择TD-SCDMA作为无线通信的3G网络。其整个硬件系统结构框图如图2所示。
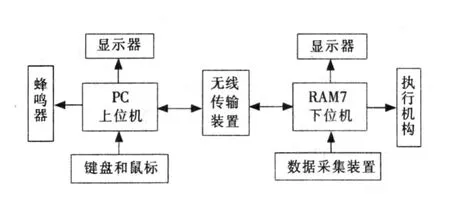
图2 智能温室大棚系统设计硬件系统结构框图Fig.2 Hardware design structure of smart greenhouse
3 系统的软件设计
系统的软件部分主要由上位机软件和下位机软件两大部分组成。
上位机部分的各种功能都是由“智能温室控制中心”这个软件来实现,该软件由数据采集模块、数据处理显示模块、图形界面模块、控制参数更新、SQL数据库等组成。主要用来完成以下几个功能:数据采集、数据处理、控制参数更新和自动检测报警。该软件采用了图形界面,在其左边有5个功能按钮分别是数据采集、数据处理、数据发送、生长控制模型更新和自动检测报警。当按下“数据采集”时,PC机首先会向无线传输模块发出接受命令请求,无线传输模块会把从下位机中采集到的当前各个传感器中的数据值发送给PC机,最后会在PC机上进行显示。当按下“数据处理”时,PC机会调用数据处理模块和SQL数据库对采集到的数据进行处理,最后会把处理好的结果进行显示。当按下“控制参数更新”时系统会调用控制参数更新模块对下位机中的标准参数进行更新。在进行“控制参数更新”时系统需要调用“数据发送”模块。“数据发送”模块主要用来调用无线传输装置将命令和数据传达给下位机,从而使下位机发生一定的动作。
下位机软件部分由应用程序、驱动程序和Linux操作系统3部分组成。当整个下位机初始化后,运行在Linux操作系统之上的应用程序首先会调入标准参数,接着会采集当前的光强信号、二氧化碳浓度、湿度信号和温度信号,然后它会把当前值和标准参数一起加载到各自对应的控制模块中,最后处理器会对不同的采集模块采取不同的控制方法。如对于二氧化碳采用传统的PID控制和排风控制,二氧化碳控制模块首先会加载当前二氧化碳浓度值和二氧化碳标准参数到 PID控制算法中,处理器会根据二氧化碳控制模块最后的处理结果来判读当前温室大棚内的二氧化碳浓度到底是偏高还是偏低,如果二氧化碳浓度偏低,则处理器会控制喷头喷出适量的二氧化碳;如果二氧化碳浓度偏高处理器则会控制排风扇排放二氧化碳。由于向外排风时室内温度会降低或升高,冬季的时候外边温度低,排风后室温会降低,夏季的时候外边温度高,排风后温度反而会升高。因此排风前需要先把当前的温度值保存起来,排完风以后再通过加热器加热或通过制冷机降温。对于光照,处理过程与二氧化碳类似,只需要采用调节光亮度的方式和控制遮光窗帘的升降程度的方法即可。对于温度可通过调节加热器和制冷机来实现。而对于湿度的控制则采用加湿器和排风控制相结合的方法,这是由于温度和湿度控制存在大滞后、非线性的特点,所以采用传统的控制方法无法实现,这里采用了预测控制的方法。所谓预测控制就是根据对象的历史信息和未来输入来预测其未来输出。预测控制常用的控制算法有动态矩阵控制(DMC)、模型算法控制(MAC)和模型预测启发控制(MPHC),这里选择动态矩阵控制算法。不论算法如何不同,都应建立在预测模型、滚动优化、反馈校正3项基本原理基础上。系统首先会依据刚刚采集到的一系列数据建立数学模型,依据数学模型和输出差值通过反馈对输入进行反复滚动修正,直到满足精度要求即可,简言之就是系统根据输入的温度和湿度量通过最优控制执行机构完成相应的动作,从而使农作物所处环境的温度和湿度达到农作物生长所需的参数指标。由于通风控制会改变温室的温度,所以在采用通风控制之前需要先对当前温度进行保存,通风控制完毕还需控制加热器加热或制冷机制冷到通风控制前的温度。总的来说,系统会针对不同的环境参数采取不同的控制方法,从而使环境参数达到农作物生长所需的最好的参数指标。
驱动程序由传感器采集驱动和输出执行驱动2部分组成。传感器采集驱动又包括了光强采集模块、二氧化碳采集模块、湿度采集模块和温度采集模块,它们主要负责完成对外部各个传感器的数据采集,然后将采集到的数据传送给操作系统和应用程序进行处理。输出执行驱动会根据操作系统发来的控制命令控制相应的外部执行机构完成相应的动作。
Linux操作系统位于应用程序和驱动程序之间,用来调度、协调应用程序和驱动程序的相互配合。如通过操作系统的API函数来调出传感器采集驱动采集到的数据,然后再通过API函数把这些数据传递给应用程序,应用程序首先会对数据进行优化处理,然后会根据优化处理结果给输出执行驱动发送相应的命令,输出执行驱动会根据发来的控制命令控制相应的外部执行机构完成相应的动作。由于采集到的各种环境参数可能需要发给PC机进行显示,所以采集完数据以后系统会首先判断是否有无线请求,如果有无线请求,这些数据会首先发给无线传输模块,然后发给PC机进行显示。默认情况下这些数据会间隔一定的时间向 PC机发送一次,PC机会根据这些数据进行处理、优化,最后给出标准参数。此外下位机还会把当前的环境参数和标准参数传到小的液晶屏上进行显示,这样即使正在大棚内工作也可以了解当前温室的环境情况。由于嵌入式下位机采用了操作系统控制方法,它不同于普通单片机单任务的工作方式,它使用的是多任务并行处理的机制,不同的环境参数的采集和控制可以同时进行,这大大提高了调节的效率和准确度。整个智能温室大棚下位机软件结构流程图如图3所示。
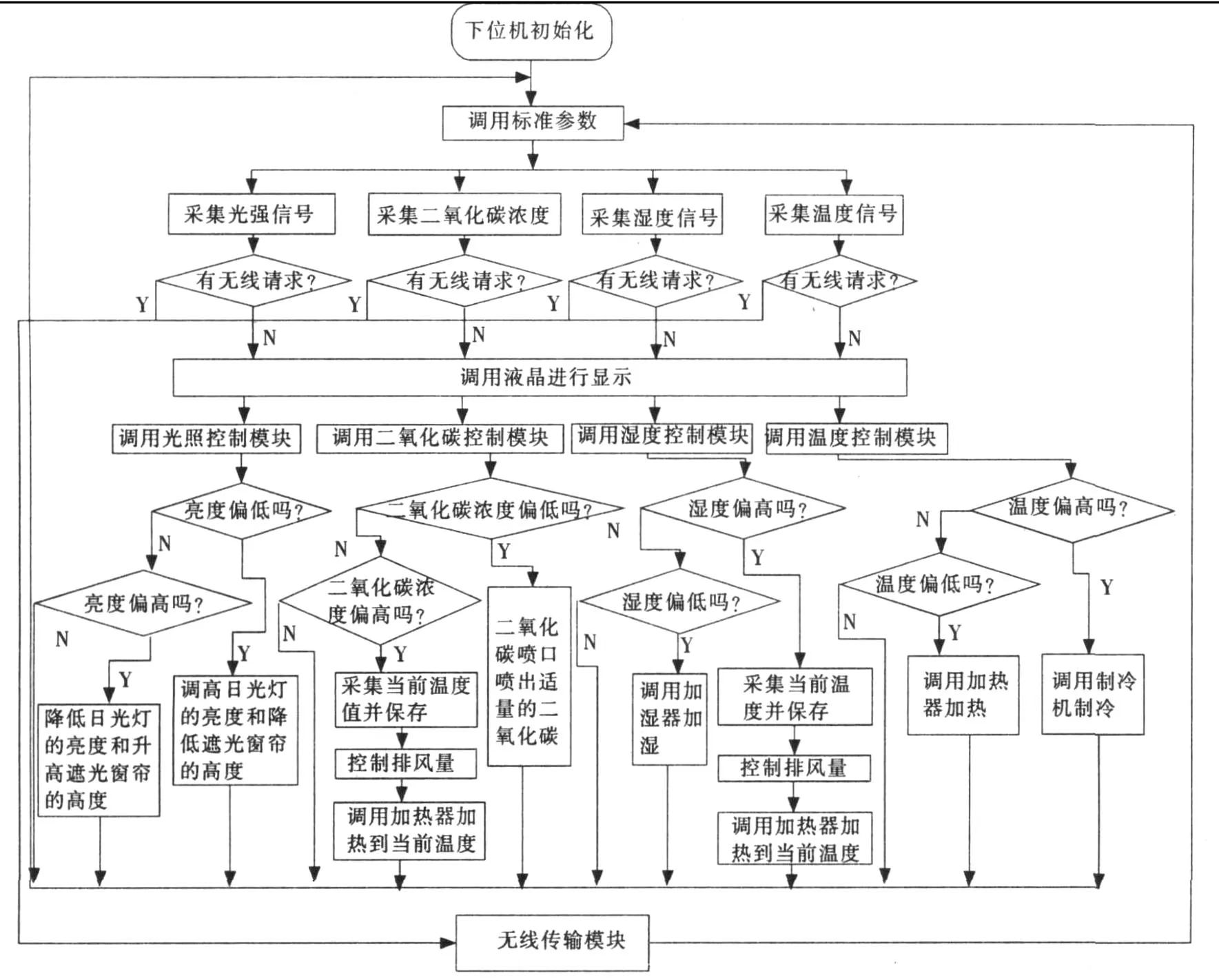
图3 智能温室大棚下位机软件结构流程图Fig.3 Software structure of lower computer of smart greenhouse
4 结 语
本系统针对目前中国温室大棚系统智能化水平低下的现状,提出了一种基于嵌入式下位机、PC上位机、无线传输模式以及分散控制方法的智能温室大棚系统。由于采用了分散控制的控制方法,单个下位机依照PC机传来的标准参数就能够独立完成环境参数的采集和调控,只要在必要的时候更新一下标准参数即可,这样大大提高了调节的实时性和准确度。PC上位机除了可以随时监测嵌入式下位机的工作状态外,还可以直接更新下位机工作所依据的标准参数来间接地控制下位机的工作。此外系统抛弃了传统的有线方式,采用了3G无线传输的方式,方便了对下位机的监控,提高了系统适用的范围和灵活性。
[1]曹德光,邓中亮.基于53C2410的智能移动业务终端设计[J].现代电子技术,2008,11(4):18-20.
[2]胡寿松.自动控制原理[M].北京:科学出版社,2007.
[3]彭木根,王文博.TD-SCDMA移动通信系统[M].北京:机械工业出版社,2007.
Design of smart greenhouse system
CHEN Shu-xin1,MA Hong-tao2,LIU Xi2
(1.Department of Journal Editorial,Hebei University of Science and Technology,Shijiazhuang Hebei 050018,China;2.College of Information Science and Engineering,Hebei University of Science and Technology,Shijiazhuang Hebei 050018,China)
In light of the low scientific and technological level of greenhouse in the country,a smart control system is designed,which combines the upper PC,the 3G transport equipment and the lower embedded machine.Smart greenhouse system can regulate smartly the environment parameters,which is beneficial to the growth of crops.Besides,a decentralized control measure better than the centralized control measure is adopted between the upper and the lower machines.
smart greenhouse system;decentralized control;embedded machine;3G
TP273+.5;S625
A
1008-1534(2011)04-0240-04
2011-03-16
责任编辑:李 穆
陈书欣(1968-),女,河北吴桥人,编辑,主要从事自动化、计算机方面的信息传播与研究。
