基于多智能体粒子群算法的盲均衡技术研究
2010-12-21张福洪朱芳英
张福洪,朱芳英
(杭州电子科技大学通信工程学院, 杭州310018)
数字通信系统中,为了克服码间干扰,正确恢复发送序列,须在接收端采用均衡器。盲均衡技术不需要借助训练序列,仅利用接收序列本身的先验知识来均衡信道,使其输出序列尽可能的逼近发送序列[1]。目前,盲均衡技术可以分为三类:BUSSGANG类算法、基于高阶或循环统计量算法和非线性均衡算法。第一类算法中的常模算法(CMA)[2]通过对接收信号取模运算将二维QAM信号映射到一维空间,然后在一维空间确定代价函数,这类算法实现简单,得到了广泛的应用,但是运算中损失了信号的相位信息。由于高阶累积量HOC(Higher OrderCumulants)[3]对高斯噪声有很强的抑制效果,引起了许多学者的关注。上述前两种均衡算法都采用梯度搜索方法获得最优解,但梯度算法易陷入局部收敛,难以获得全局最优。最近,有人把遗传算法应用于盲均衡问题[4]中,但遗传算法易陷入局部最优,不能获得全局最优的性能。本文提出基于粒子群算法的盲均衡技术,在较少的迭代次数下即可获得全局最优的性能,仿真结果表明,本文算法有较好的性能。
1 盲均衡代价函数
盲均衡原理框图如图1所示。

图1 盲均衡原理框图
对于一个稳定的、可逆的线性卷积系统,盲均衡的输入序列为:

式中r(n)为观测信号, h(n)为非最小相位的线性时不变系统, w(n)为加性高斯白噪声, “*”表示信号的卷积。
在不考虑加性高斯白噪声的情况下,均衡器的输出信号为:

盲均衡的目的就是使

式中τ为一整数时延, φ为一常数相移。为了满足式(3), h(n)与g(n)组成的联合冲击响应为:b(n)中只有唯一的非零元素βeθ,其中β 和θ分别表示理想系统的幅度和相位因子。

1.1 多模算法(MMA)代价函数
Godard算法广泛地应用于实际的盲均衡器中,适用于具有恒定包络的发射信号的均衡。常模算法是其中最常用的算法。但由于常模算法是盲相位算法,对相位不敏感,当系统的载波频率或信道存在相位旋转时,均衡器收敛后的输出信号有一个任意的相位旋转。为了克服此缺陷,已提出的多模算法代价函数中包含了多个(至少两个)常数模值。 MMA是通过把CMA代价函数中均衡器输出信号的实部和虚部离开得到的,其代价函数为

1.2 基于高阶累积量的代价函数
对于16 QAM信号,其均衡后的信号y(n)的二阶和四阶累积量定义为:

其中, y表示均衡器输出信号的向量, y*表示y的共轭。
文献[5]给出了一种代价函数:

其中二阶累积量C2,y不为零。由文献[6]可知:
式中C2,S和C4,S分别为发送序列s(n)的二阶和四阶累积量。L为均衡器抽头的个数, b(n)为定义的联合冲击响应;则代价函数可以重新写为:
由于

易知

当且仅当b(n)中有唯一的非零元素时取等号才成立。由式(7)~式(11)可推知:

这样最大化J4,2就可以实现盲均衡。
2 基于粒子群算法的盲均衡
2.1 粒子群算法
设粒子群[7]中粒子个数为S,则在一个D维的搜索空间中,粒子i(1≤i≤S)在第k次迭代时的位置信息可以表示为,速度信息表示为,粒子到目前为止所经历的最好位置为,群体中所有粒子到目前为止所经历过的最好位置为,其中b为具有最优位置粒子的索引。在这里,所谓的“最好位置”即为适应度最高的解。粒子群算法的进化方程可描述为[6]:

其中, d表示粒子的第d维(1≤d≤D), ω为惯性权重, c1和c2为学习因子(也称加速常数), r1和r2为分布于[0, 1]间的随机数。为了减少在进化过程中粒子离开搜索空间的可能性,粒子速度通常限定在一定范围内,即
2.2 基于粒子群算法的盲均衡方法
将粒子群算法应用于盲均衡,需要构造合适的适应度函数。对于式(5),取fMMA=1/JMMA作为适应度函数,基于高阶累积量的代价函数取f4,2=J4,2作为适应度函数。
基于粒子群算法分别以fMMA和f4,2作为适应度函数的盲均衡方法分别称为:粒子群多模盲均衡(PSOMMA)和基于粒子群的高阶累积量盲均衡(PSOHOC),得到基于粒子群算法的盲均衡方法的基本步骤如下:
步骤1 初始化种群,随机产生S个粒子的种群,并随机产生每个粒子的位置和速度;
步骤2 分别以fD、 fMMA和f4,2作为适应度函数并计算适应度, 保存全局最优解 pkgd和局部最优解pkid
步骤3 根据式(13)和式(14)更新粒子的速度和位置;
步骤4 重新计算适应度值,更新pkgd和pkid;
步骤5 如果达到最大迭代次数,算法终止;否则,转至步骤3。
3 性能仿真与分析
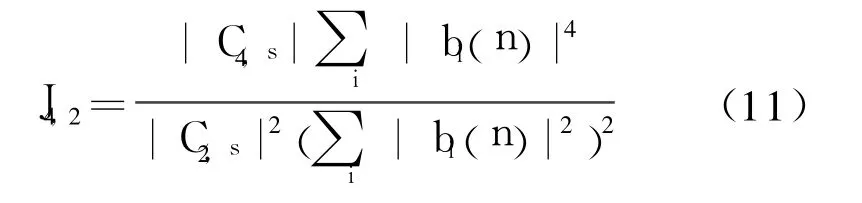
信道参数设置为:信道冲击响应h(n)如表1所示,信号源为16 QAM信号,均衡器采用11个抽头系数,初始值随机产生,输入端信噪比为30 dB,接收信号星座图如图2所示。 PSO的参数设置为:种群数为30,循环迭代次数为800。算法性能采用收敛后的均衡器输出星座图和码间干扰(ISI)来表示。
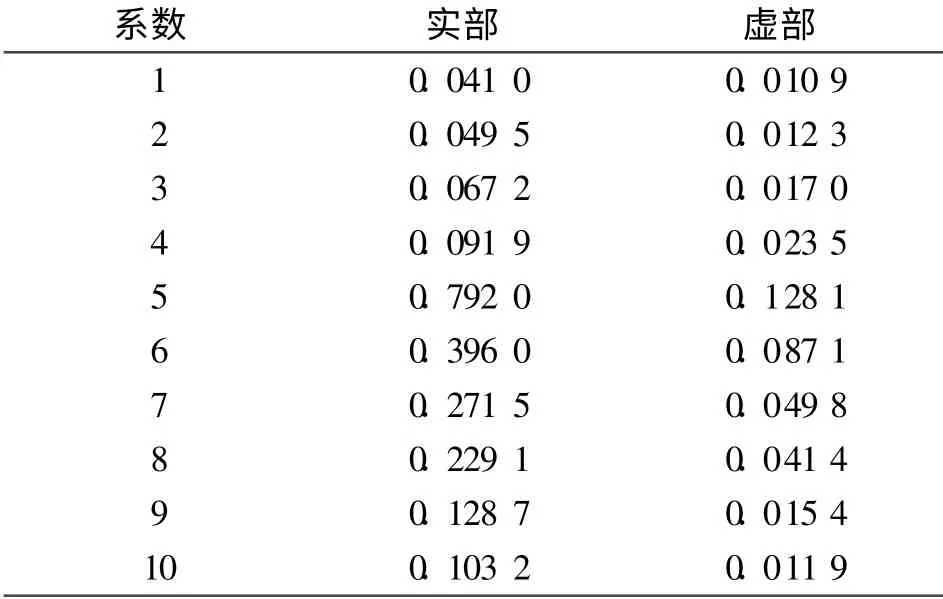
表1 信道的冲击响应
码间干扰定义为

图2给出了在信噪比为30 dB情况下均衡器输入信号的星座图。
图3给出了码间干扰和迭代次数的关系。为了比较算法性能,采用的均衡器有:基于遗传算法的常模盲均衡(GACMA)[8],基于遗传算法的多模盲均衡(GAMMA)、PSOMMA和PSOHOC。由图可见,信道的初始码间干扰为-1.2386 dB, PSOHOC有较快的收敛速度,在200次迭代以后开始收敛,且均衡输出码间干扰为-25.656 dB,降低了24.4174 dB;PSOMMA在300次迭代以后收敛,均衡输出码间干扰为-22.674 dB,降低了21.4354 dB;GAMMA在650 次迭代以后收敛,均衡输出的码间干扰为-19.717 dB,降低了18.4784 dB;而GACMA在750次迭代以后收敛,均衡输出的码间干扰为-16.247,降低了15.0084 dB,所以基于粒子群算法的高阶累积量盲均衡算法有较快的收敛速度,且收敛后的干扰较小。

图2 接收信号星座图
图3 码间干扰与迭代次数的关系曲线
图4给出了PSOMMA算法的输出信号星座图。PSOMMA的信号均衡效果较好,没有相位偏移。
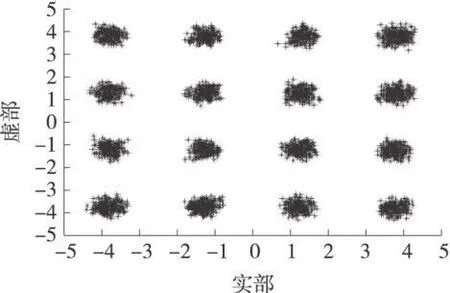
图4 多模准则的均衡器输出信号星座图
图5出了PSOHOC算法的输出信号星座图。由图可知, PSOHOC算法不但均衡效果好,而且没有相位偏移。
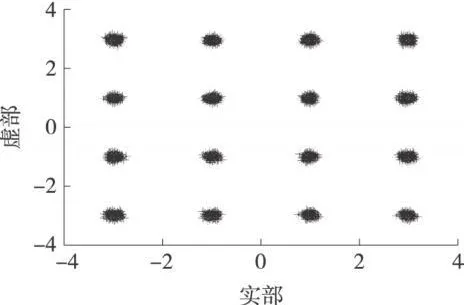
图5 高阶累积量准则的均衡器输出信号星座图
4 结束语
由于梯度搜索存在局部最优收敛的缺点,本文把常模准则、多模准则、高阶累积量准则分别结合粒子群算法,提出新的解决盲均衡问题的方法。通过计算机仿真表明,本文所提出的新的算法,不但有较快的收敛速度,且收敛后性能较优,证明了本算法的实用性。
[ 1] 赵知劲,陈刚.盲均衡的发展[ J].杭州电子工业学院学报,2000, 20(6):61-64.
[ 2] Godard D.Self-Recovering Equalization and Carrier Tracking in Two-dimensional Data Communication Systems[ J] .IEEE Trans.on Commn., 1980, 28(11):1867-1875.
[ 3] 何晓薇,樊龙飞.基于二阶、四阶累计量的盲解卷机准则[ J] .电子科技大学学报, 1998(4):27-30.
[ 4] 郑鹏,尤春艳,刘郁林,等.基于最大峰度准则和遗传算法的盲辨识与盲均衡[ J] .重庆邮电学院学报, 2004, 16(4):64-67.
[ 5] 陈金召,郑鹏,尤春艳.用遗传算法求解基于高阶累积量的盲均衡问题[ J] .现代电子技术, 2003, 24:64-66.
[ 6] 张贤达,保铮.通信信号处理[ M].北京:国防工业出版社, 2000.
[ 7] Kennedy J, Eberhart R.Particle Swarm Optimization[C] //IEEE International Conference on Neural Networks, 1995, 4:1942-1948.
[ 8]Liu Feng, Ge Lin-dong, Wu Ye-jin, et al.Blind Equalization Based on Immune Optimized Genetic Algorithm[ C] //2008 9th International Conference on Signal processing Proceedings, 2008, 2:1719-1721.
