基于PWM转速电流双闭环直流调速系统
2010-12-09韦建德
韦建德
(海南师范大学 物理与电子工程学院,海南 海口 571158)
基于PWM转速电流双闭环直流调速系统
韦建德
(海南师范大学 物理与电子工程学院,海南 海口 571158)
对PWM转速电流双闭环调速系统进行了研究,以PWM电力电子变换器产生连续可调的直流电源,驱动直流电动机的转速连续可调;选择调节器结构,进行参数计算和近似校验.并对系统的稳定性、稳态性能和动态性能进行分析,给出其仿真波形.
调节器;双闭环调速系统;稳定性;稳态性能;动态性能
在各类电机调速系统中,由于直流电机具有良好的起动、制动和大范围内实现平滑调速的性能,直流调压调速技术已广泛运用于工业、航天领域的各个方面.而脉宽调制(PWM)控制技术以其控制简单、灵活和动态响应好的优点而成为电力电子技术最广泛应用的控制方式,最常用的PWM直流调压调速技术具有调速精度高、响应速度快、调速范围宽和损耗低等特点,特别在中、小容量的系统中得到了广泛的应用.
1 PWM转速电流双闭环调速系统设计
1.1 PWM转速电流双闭环调速系统起动过程
起动过程转速和电流波形见图1.图中Id为整流器整流电流,IdL为负载电流.
双闭环直流调速系统的起动过程有以下三个特点:
1)饱和非线性控制.在第Ⅰ阶段的电流上升过程,当转速调节器(ASR)不饱和时,转速环闭环,整个系统是一个无静差调速系统,而电流内环表现为电流随动系统.当ASR饱和时,转速环开环,系统表现为恒值电流调节的单闭环系统.

图1 双闭环直流调速系统的起动过程Fig.1 Startup process of double close-loop DC motor control system
2)转速超调.在第Ⅲ阶段的转速调节过程,由于ASR采用了饱和非线性控制,起动过程结束进入转速调节阶段后,必须使转速超调,ASR的输入偏差电压△Un为负值,才能使ASR退出饱和.这样,采用PI调节器的双闭环调速系统的转速响应必然有超调.3)准时间最优控制.起动过程中的主要阶段是第II阶段的恒流升速,它的特征是电流保持恒定.
一般选择为电动机允许的最大电流,以便充分发挥电动机的过载能力,使起动过程尽可能最快.这阶段属于有限制条件的最短时间控制.因此,整个起动过程可看作为是一个准时间最优控制[1].
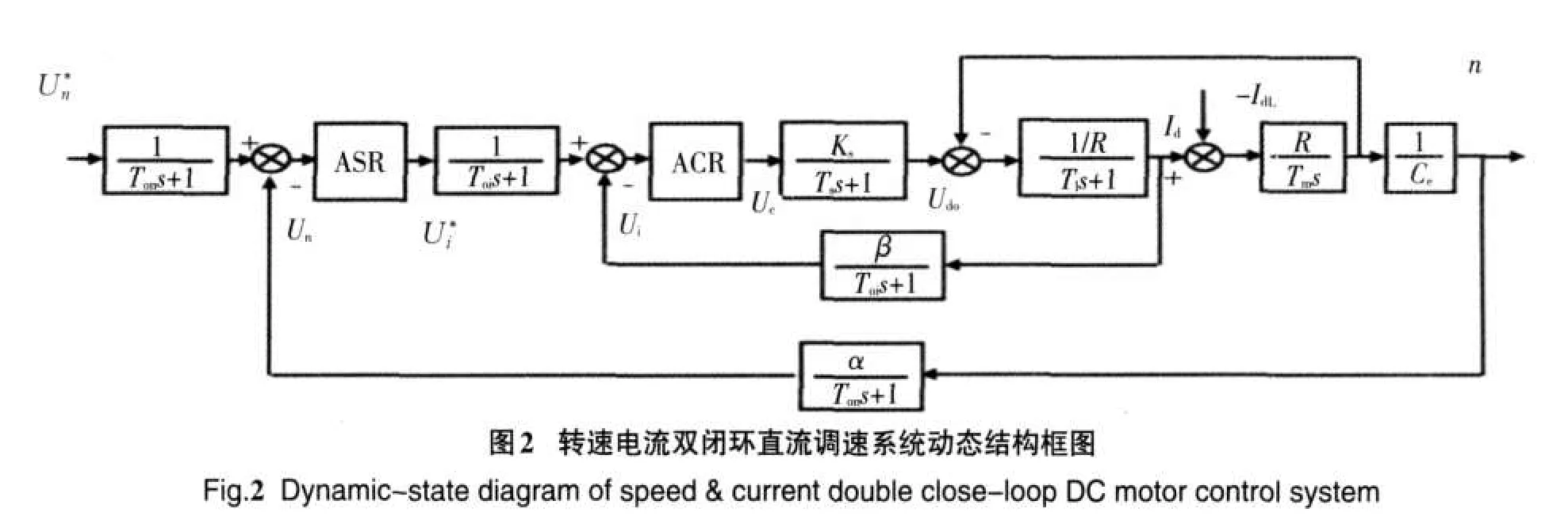
1.2 PWM转速电流双闭环调速系统动态结构框图
为了实现直流调速系统快速起制动,突加负载动态速降小,在系统中能够随心所欲地控制电流和转矩的动态过程,设计的转速电流双闭环直流调速系统动态结构框图见图2,系统中有电流调节器(ACR)和转速调节器(ASR)两个调节器,为了滤除电流检测信号中的交流分量,电流检测通路中加入一阶惯性环节起低通滤波作用;由于转速反馈电压中含有换向纹波和交流分量(噪声),转速反馈通路中也加入滤波环节,为了平衡反馈通路中的滤波环节带来的延迟作用,电流调节器和转速调节器的输入都加入了同等时间常数的滤波环节.电流调节器处于内环,转速调节处于外环,设计过程先进行内环后进行外环.设计的基本数据为:
采用三相桥式整流装置,直流电动机:额定电压220 V,额定电流13.6 A,额定转速1 480 r/min,电动势系数Ce=0.131 V/(r·min-1),允许过载倍数λ=1.5;晶闸管装置放大系数Ks=76;电枢回路总电阻R=6.58 Ω;电磁和机电时间常数Tl=0.018 s,Tm=0.25 s;转速和电流反馈系数α=0.003 37 V/(r·min-1),β=0.4 V/A;反馈滤波时间常数Toi=0.005 s,Ton=0.005 s.
1.3 设计电流调节器
为使在突加控制作用时电流没有太大的超调,电流环以跟随性能为主,稳态无静差,将电流内环校正成典型Ⅰ型系统,电流调节器ACR采用PI调节器,传递函数为:

式中τi为电流调节器时间常数,Ki为电流调节器放大系数.要求电流超调量σi≤5%,选择电力电子变换器滞后时间参数TS:

1.4 设计转速调节器
为实现转速无静差,设计系统成典型Ⅱ型系统,转速调节器ASR采用PI调节器,传递函数为:
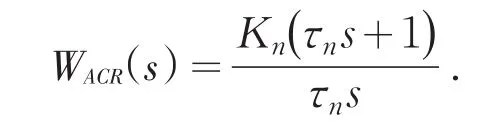
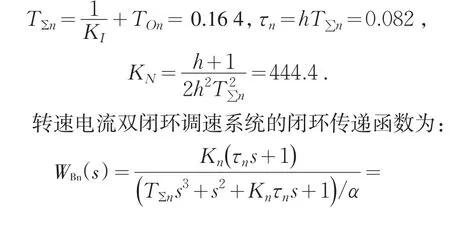
式中τn为转速调节器时间常数,Kn为转速调节器放大系数.经推算化简得调速系统的开环传递函数(输入等效为/α)为:

其中:(以空载起动到额定转速时的转速超调量σn≤10%,取开环对数频率特性中频宽h=5)

1.5 PWM转速电流双闭环调速系统稳定性分析
系统的特征方程为:
由劳斯判据可知系统是稳定的.
2 借助Simulink仿真得到PWM转速电流双闭环调速系统仿真波形
2.1 转速调节器ASR输出、电流调节器ACR输出和电动机起动动态特性仿真
转速调节器ASR输出仿真波形、电流调节器ACR输出仿真波形和电动机起动特性仿真波形分别见图3~图5.

图3 电动机起动特性Fig.3 The startup characteristic curve of the motor
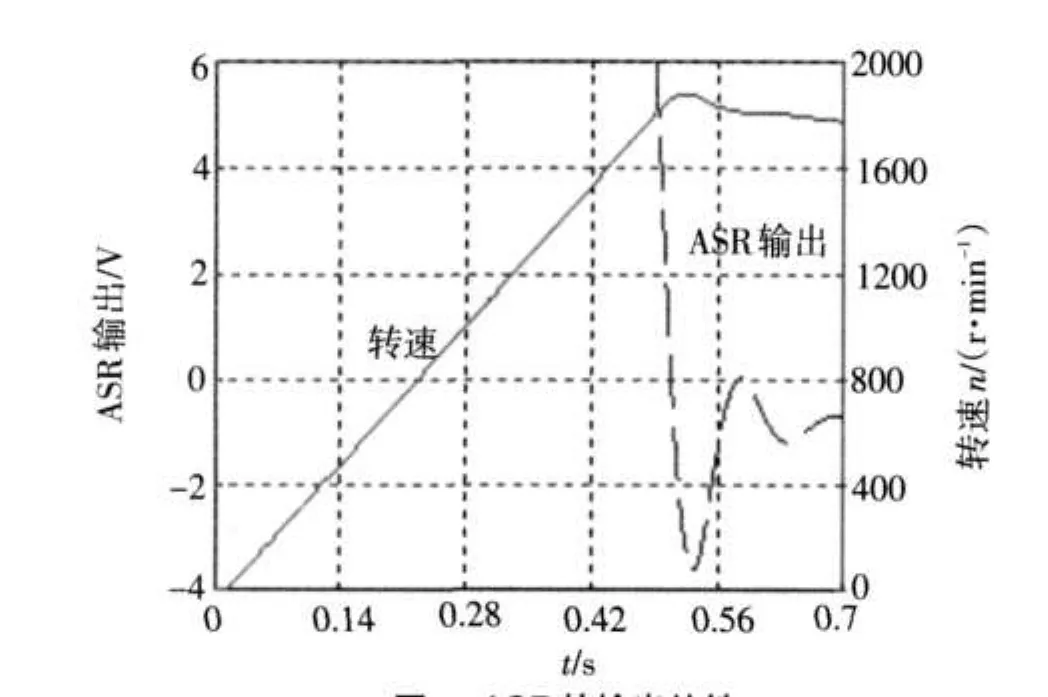
图4ASR的输出特性Fig.4 The output characteristic curve of ASR
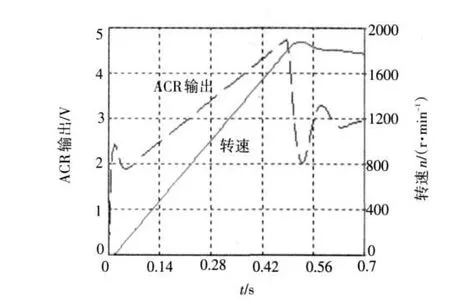
图5ACR的输出特性Fig.5 The output characteristic curve of ACR
通过仿真实验可见:
1)图3所示的电动机起动特性十分接近理想特性,如图1示,起动过程已达到预期目的.
但对于系统性能指标来说,起动过程中电流的超调量为5.3%,转速的超调量达21.3%,显然这一指标与理论最佳设计尚有一定的差距,尤其是转速的超调量略高一些.
2)由图5示的电流调节器ACR从起动到稳态运行只经历线性调节一种状态.而由图4示的转速调节器ASR从起动到稳态运行经历了饱和限幅输出与线性调节两种状态.
2.2 系统电动机转速在突加负载及电网电压突加情况下动态特性的仿真
一般情况下,双闭环直流电机调速控制系统的外部干扰主要是“负载突变与电网电压波动”两种情况,其仿真波形见图6、图7,通过仿真实验可见:
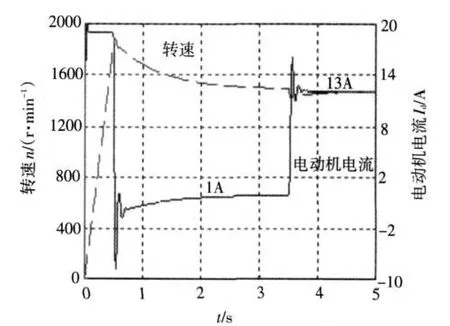
图6 突加负载抗扰特性Fig.6 The anti-interference characteristic curve of load
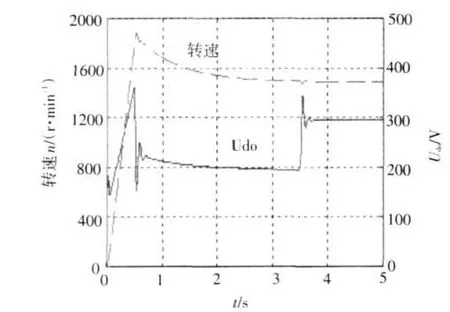
图7 电网电压突加抗扰特性Fig.7 The anti-interference characteristic curve of electric power voltage
1)系统对负载的大幅度突变具有良好的抗扰能力,在ΔI=12 A的情况下系统速降为Δn=44 r/min,恢复时间为tf=1.5 s.2)系统对电网电压的大幅波动也同样具有良好的抗扰能力.在ΔU=100 V的情况下,系统速降仅为9 r/min,恢复时间为tf=1.5 s.3)与理想的电动机的起动特性相比较,该系统的起动和恢复时间显得略长一些(轻载状态下接近4 s).
3 结语
1)仿真结果与理论设计有一定的差距,由图3可见,电流动态响应的超调量为δ=5.3%(理论值为小于5%,取4.3%),转速动态响应超调量为δ=21.3%(理论值为小于10%,取8.3%).另外,ASR与ACR的参数与理论设计值也有差距.
2)由仿真结果,从动态过渡时间及动态恢复时间体现出系统还未调整到最佳状态,对于小功率电动机来说系统的响应慢了一点.
所以,对于实际系统,还需进行实际调整调节器参数以使系统达到最佳状态,满足实际要求.
[1]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2009:11-17;57-60;76-83.
[2]周渊深,宋永英,朱希荣.交直流调速系统与MATLAB仿真[M].北京:中国电力出版社,2004:1-5.
[3]范正翘.电力传动与自动控制系统[M].北京:北京航空航天大学出版社,2003:158-167.
[4]周凯汀,郑力新.基于MATLAB的双闭环直流调速系统仿真及参数进化设计[J].计算技术与自动化,2001,20(2):10-14.
[5]李威震,于敬玲.基于MATLAB的双闭环可逆直流调速系统的仿真研究[J].计算机仿真,2004,21(11):42-44.
[6]李永龙,李祖枢,王牛.直流电机双闭环调速系统(DLM)的建模与辨识[J].控制理论与应用,2008,25(6):4-7.
[7]高国燊.自动控制原理[M].广州:华南理工大学出版社,2009:62-64;102-110.
The Speed&Current Double Close-loop DC Motor Control System Based on PWM
WEI Jiande
(College of Physics and Electronic Engineering,Hainan Normal University,Haikou571158,China)
The speed¤t double close-loop DC motor control system based on PWM produced adjustable DC power supply with the PWM electric power electronics transformation and adjustable speed of DC.A modulator structure was selected and computed,and its parameter was corrected.The system stability,&steady-state performane and dynam⁃ic-state performance were analyzed,and its simulation waveform was given.
Regulator;double close-loop DC motor control system;stability;steady-state performance;dynamic-state performance
TM 33
A
1674-4942(2010)04-0383-04
2010-07-09
黄 澜