基于支持向量机与结构矩的车型识别实时鲁棒算法
2010-11-26陈炳权刘宏立
陈炳权, 刘宏立
(1.湖南大学电气与信息工程学院,中国 长沙 410082;2.吉首大学物理科学与信息工程学院,中国 吉首 416000)
传统的模式分类方法诸如模板匹配、支持向量机(SVM)等用于车型分类[1-4],通常先提取车型分类所需要的特征,然后通过人工智能方法进行分类,这些仍然是目前主要的分类方式[5].曾有人尝试将轮廓曲线用傅里叶描绘子来表示,用最小距离分类器分类车辆,从而简化分类器的设计.Huges根据形状参数的不变矩特征分类车辆,Hollis 则使用了Maitra不变矩特征,从而增强了系统对灰度强度的不变性,更有利于利用神经网络方法的分类.学习分类方法是机器学习的一个重要研究领域,其目的是从已知类别的数据中估计出它们的相关性以便对未来数据准确分类.由于传统学习分类方法受到基于样本无限的限制,到了20世纪60年代,Vapnik 等人开始进一步研究小样本情况下的机器学习问题,至90年代中期,有限样本情况下的机器学习理论研究逐步成熟起来,形成了统计学习理论(Statistical Learning Theory, 简称SLT),其代表性标志就是Vapnik 和他的合作者所提出的支持向量机算法,该理论指出了在小样本情况下学习机器的经验风险和期望风险之间的关系,从而提出了结构风险最小化(Structural Risk Minimization, 简称SRM)的机器学习原则,使得有可能找到复杂程度和有限样本相适应的且泛化能力最好的学习机器[6-7].
笔者分别采用了神经网络和支持向量机算法,用不变矩作为识别特征,对白天阴雨环境下的车辆进行车型识别处理.经过比较可知:不变矩特征能有效的反映出车辆的类型,并且相对于神经网络,采用支持向量机方法的检测算法能更加有效地对车辆进行识别.
1 支持向量机方法
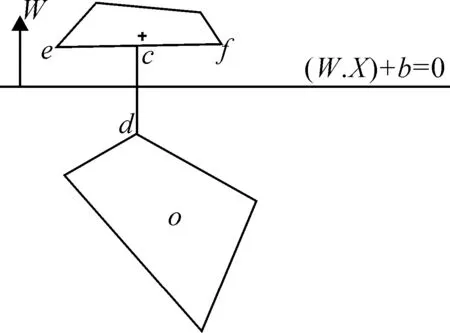
图1 平分最近点法
空间分类问题常常采取“平分”最近点的策略,图1给出的2类点,先分别作它们的凸壳,再找到这2个凸壳的最近点c和d,作线段cd的垂直平分线,以此直线把平面划分成2部分.
寻求2个凸壳的最近点c和d是该法的关键,通过求解1个最优化问题就可以解决,其线性可分支持机算法如下[8-9]:
(i)设已知训练集T={(x1,y1),(x2,y2),…,(xl,yl)}∈(X×Y)l,其中:xi∈X=Rn,yi∈Y={1,-1},i=1,2,…,l;
(ii)构造并求解最优化问题:
(1)
(2)
αi≥0,i=1,…,l,
(3)
(iv)构造分划超平面(w*·x)+b*=0,由此求得决策函数:
f(x)=sgn((w*·x)+b*).
(4)
2 结构矩及其近似算法
Chen的矩仅被应用到计算区域边界的不变矩,将Chen的矩定义扩展到包含有限数目的光滑曲线的复杂结构或骨架上,定义如下[9]:
(5)
(6)
其中c1+c2…+cn代表由任意n条曲线组成的结构,从(5)至(6)式推导得到7个满足平移、缩放和旋转不变的矩,其中:
φ7=(3η21-η03)(η30+η12)[(η30+η12)2-3(η21+η03)2]-(η30-3η21)×(η21+η03)
[3(η30+η12)2-(η21+η03)2],
(7)
(8)
(7)不仅描述了Hu的区域矩所能描述的形状特征,而且还描述Hu的区域矩不适合描述的简单或复杂的、封闭或不封闭的骨架特征.为了对结构矩进行数值计算,将(7)和(8)式离散化为:
(9)
(10)

为了减少(7)式所产生的误差,利用矩之间的比值来消除(8)式的比例因子μ00,则
(11)
(11)式显然保持缩放不变特性,同理可知:
(12)
(11)至(12)式满足任意结构的平移、缩放和旋转不变的矩公式,可以用于结构的识别.在数字图像上计算(11)和(12)式时,取Δs=1,即为结构矩的近似算法.对于一幅N×M个像素点的结构图,采用(11)式和(12)式的近似算法需要对每个点扫描1次,而采用(7)式则每个点可能搜索2次以上,且须额外占用N×M个点的存储空间用于标记每个点的连通情况.(11)和(12)式是2至3阶结构矩的近似计算公式,同理可得4阶及以上的高阶结构矩的近似计算公式用于结构识别.
3 车型识别过程
车型分类问题实质是一个多目标图像的分割问题[10-13],而支持向量机方法却是针对2类分类问题提出的,目前常用的多类支持向量机方法有:第1类是优化求解法,第2类是通过构建和组合多个2类分类器来实现多类分类[14].
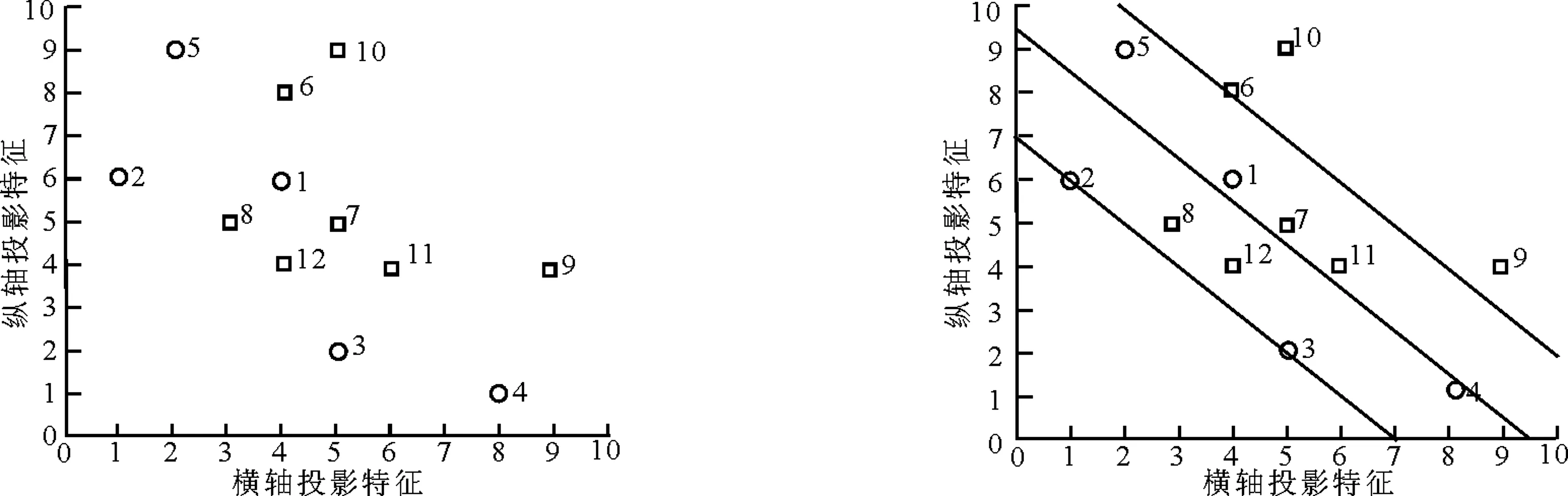
笔者采用了不变矩作为识别特征,对已经分割出来的车辆沿着纵横2个方向进行投影,从而得到灰度直方图,然后将这些投影数据代入不变矩的计算公式中,求出车辆的特征向量.之后通过1对1方法将2类支持向量机推广到多类支持向量机,即按照第2类分类的处理方法:先将车辆分成“大型车辆”和“中小型车辆”,然后将“大型车辆”分成“拖挂”和“大型”,再将“中小型车辆”分成“中型”和“小型”,最后再将每类分成“客车”和“货车”.利用Matlab中的支持向量机工具箱进行的实验如图2,图1在车辆沿横纵轴方向上投影的不变矩特征中分别取其一阶结构矩作为分类特征,对车辆按照“大型车辆”(用圆圈标识)和“中小型车辆”(用方框线标识)进行分类,2个坐标轴分别代表沿着图像的横轴和纵轴2个方向上投影后计算出来的一阶结构矩特征.
(a) 原始数据 (b) 利用线形核进行分类 (c) 利用线形核进行分类(引入松弛变量c后)图2 大型车辆和中小型车辆分类
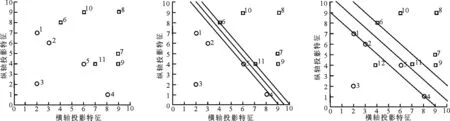
图2(b)利用线形核对这些原始数据进行分类,效果非常理想.图2(c)引入了1个点“12”,为了能够对这种情况进行处理,必须引入松弛变量c,以便将点“12”这样的无意义点丢弃,从而保证分类器的范化性.通过实验可以看出,当σ比较小时,分类效果较好,但是范化性较差;当σ比较大时,分类效果较差,但是范化性得到提高.图3对车辆按照“货车”(用方框标识)和“客车”(用十字线标识)进行分类演示,此时分类与车辆的大小无关,文中采用了一阶相对不变矩特征.这2个不变矩特征都经过了归一化处理,以便其大小保持在0~10之间.
(a) 原始数据 (b)利用线形核进行分类(引入松弛变量c后)图3 直线上2类点的线性划分
图4~5描述了本系统中对车型分类的实现过程,所进行的实验都是在阴雨天环境下进行拍摄的, 光照不足.视频拍摄中时,人站在建筑物从上向下拍摄,拍摄环境非常类似于道路旁安置的监控摄像机.
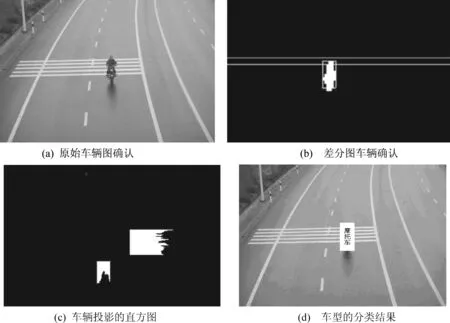
图4 摩托车分类的可视化结果
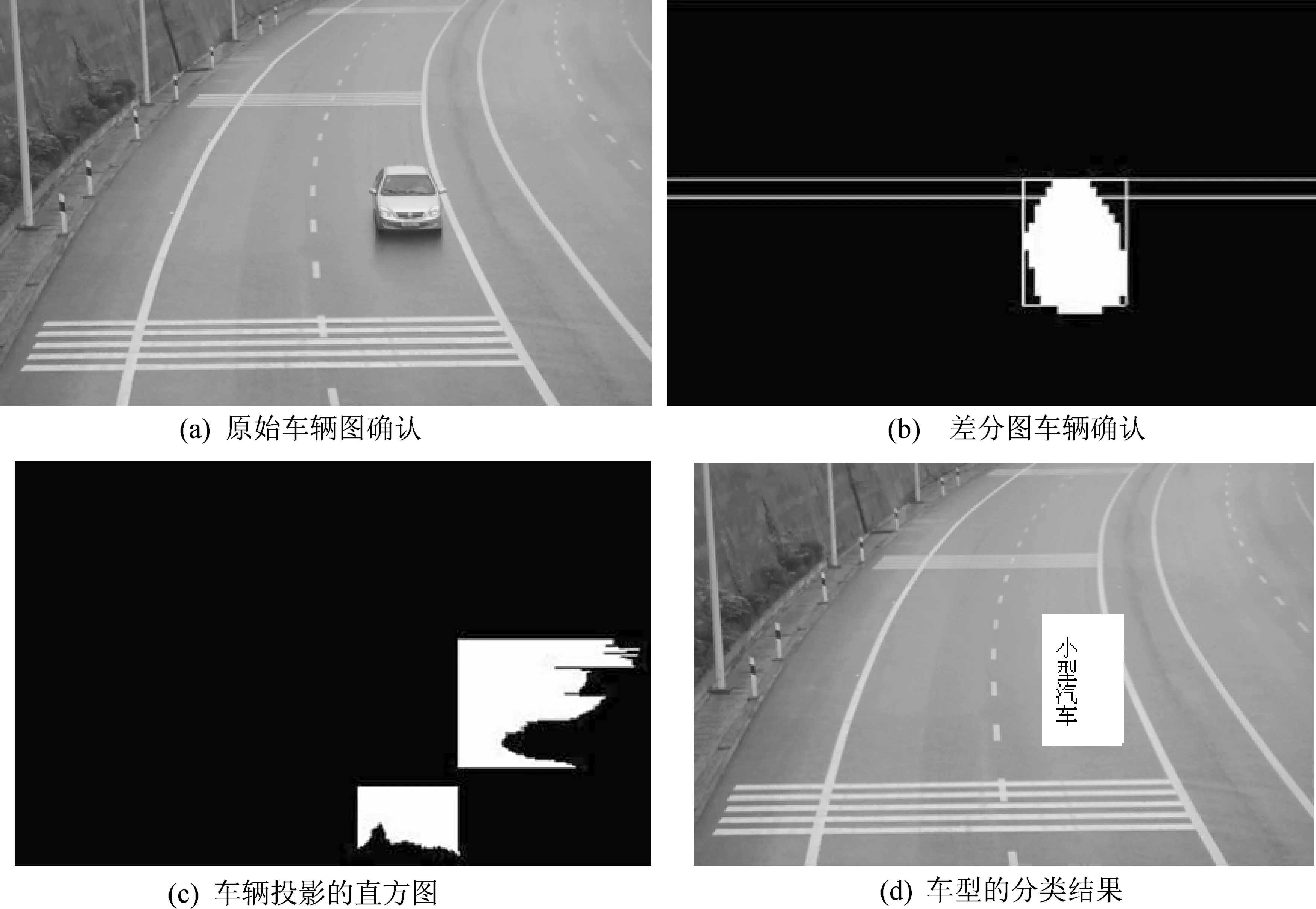
图5 小型汽车分类的可视化结果
为了验证笔者设计方法的可靠性,分别采用神经网络和支持向量机算法,针对不同的工作环境、不同的交通场景进行车型识别对比实验.经过比较可以确定:不变矩特征能够有效地反映出车辆的类型;相对于神经网络,支持向量机方法能更加有效地对车辆进行识别.表1为阴雨环境下车型识别算法的处理结果.笔者分别采用了支持向量机和神经网络作为学习分类器,其中支持向量机选择了σ2=9的径向基核函数、c=40作为其模型,神经网络采用2层结构:输入层16个节点、隐含层26个节点.在模型训练阶段,人工选取了包含5类车型共250个训练样本.在测试阶段,采用训练阶段得到的模型对包含5类车型共250个样本进行了测试.从表1中可以看出,在小样本情况下,支持向量机可以获得比神经网络更高分类精度.同时可知:对2种分类器,大客车、小客车和摩托车的分类精度较现有的分类精度得到较大提高,而货车分类精度普遍较低,究其原因是大客车、小客车和摩托车与其他类型的车辆在特征上差别较大,而货车种类较多,虽然它们与大客车、小客车和摩托车的特征差别较大,但其特征差别较小,易导致错分类.
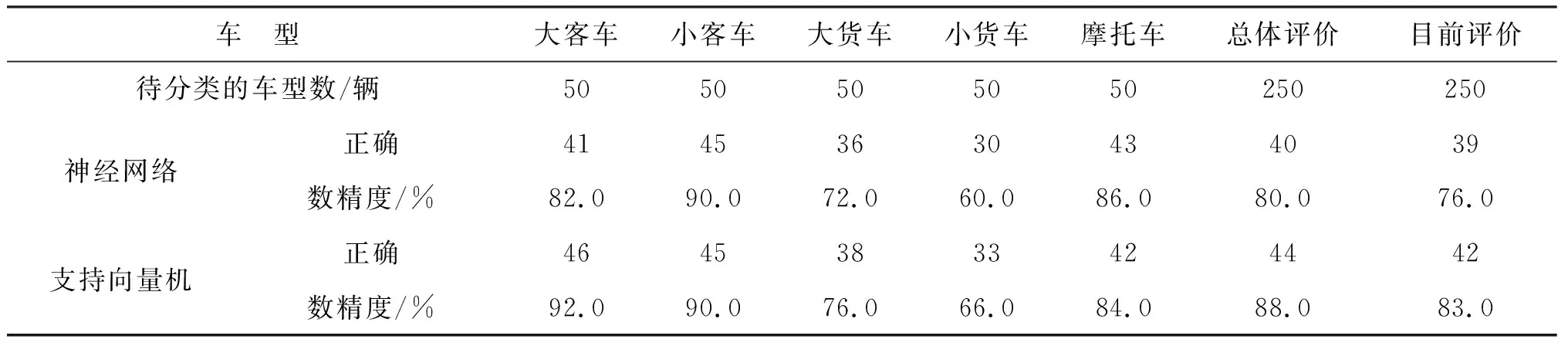
表1 阴雨环境下车型分类评价结果
4 结语
针对交通车辆种类多、特征差异大、样本获取代价高等因素造成车辆分类难度大的问题,笔者选择了结构矩为车辆特征,以支持向量机方法为学习分类器,并获得了较高的车辆分类精度,在一定程度上解决了车辆分类难的问题.神经网络算法进行车型识别处理与支持向量机方法对照可知:相对于神经网络,采用支持向量机方法的检测算法能更加有效地对车辆进行识别,分类精度得到了较大的提高,且鲁棒性好实时性强.
参考文献:
[1] 章毓晋.图像分割[M].北京:科学出版社,2001.
[2] GONZALZ R C,WOODS R E. 数字图象处理[M].2版.阮秋琦, 阮宇智,译.北京:电子工业出版社, 2003.
[3] 刘 东. ITS中的车辆检测技术[J]. 公安大学学报:自然科学版,2000,20(4): 36-39.
[4] 王广君.基于局部最大熵的多目标图像分割方法[J].华中理工大学学报, 2000,28(12): 4-5.
[5] ANASTASIOS D D, NIKOLAOS D D, KLIMIS S N,etal. An efficient fully unsupervised video object segmentation scheme using an adaptive neural-network classifier architecture[J]. IEEE Transactions on Neural Networks, 2003,14(3):227-231.
[6] SERGIOS T, KONSTANTINOS K. 模式识别[M].2版.李晶皎,译.北京:电子工业出版社, 2004.
[7] VAPNIK V N. 统计学习理论的本质[M].张学工,译. 北京:清华大学出版社, 2000.
[8] XIE L. Research video processing technique in Intelligent transportation system[D]. Wuhan:Huazhong University of Science and Technology, 2006.
[9] PASTORE J I, MOLER E G,BALLARIN V L. Segmentation of brain magnetic resonance images through morphological operators and geodesic distance[J].Digital Signal Processing, 2005,15(2): 153-160.
[10] 陈振华,刘成云,常发亮.基于生物视觉显著性的车辆车型识别[J].计算机科学,2010,37(2):207-208,224.
[11] 周 磊,冯玉田.最小二乘分解法在车辆识别中的应用[J].计算机仿真,2009,26(7):274-277.
[12] 高彦宇,尹怡欣.一种基于支持向量机和半监控期望最大算法的分级图像标识方法[J].自动化学报,2010,36(7):960-967.
[13] 杨立玲,胡跃明,王 婷,等.基于小波结构矩的图像识别算法[J].半导体技术,2009,34(11):1 103-1 106.
[14] HSUC W,LIN C J. A Comparison of methods for multi-class support vector machines[J]. IEEE Transactions on Neural Networks, 2002,13(2): 415-425.