基于空心杯电机的SPWM与SVPWM研究*
2010-11-21董大为
董大为,杨 墨
(上海大学机电工程与自动化学院,上海 200072)
0 引言
在交流电机调速系统中,通过采用合适的脉宽调制(PWM),一方面可以使电机对给定的控制信号作出准确快速的响应,另一方面可以减小电机的转矩脉动,提高电机的运行稳定性,并且拓宽电机的调速比[1]。目前常用的调制模式有正弦脉宽调制(SPWM)和空间矢量脉宽调制(SVPWM)两种。
空心杯电机从结构上可以分为有刷和无刷两类。有刷空心杯电机转子无铁心;而无刷空心杯电机,定子采用定子无齿槽结构,这种特殊结构近乎消除齿槽转矩,使转矩脉动大为减小。空心杯电机在高精度、宽调速范围伺服驱动中得到越来越广泛的应用,作为高效率能量转换装置,代表了电动机的发展方向之一[2]。本文所采用的无刷空心杯电机从外特性上来看,可以等效为永磁同步电动机,而其等效的交直轴电感要远小于常规的永磁电动机。
本文通过理论及试验条件分析,基于英飞凌XC164CM单片机,建立软、硬件试验平台,通过他控式变频调速系统对两种调制的性能进行比较。
1 SPWM与SVPWM原理比较
一般PWM是将调制波与载波的波形进行比较,从而得到等高而不等宽的脉冲序列。SPWM方式是使脉冲的宽度按照正弦规律变化,从而在效果上和正弦波等效,故要以正弦波为调制波。其原理图如图1所示。
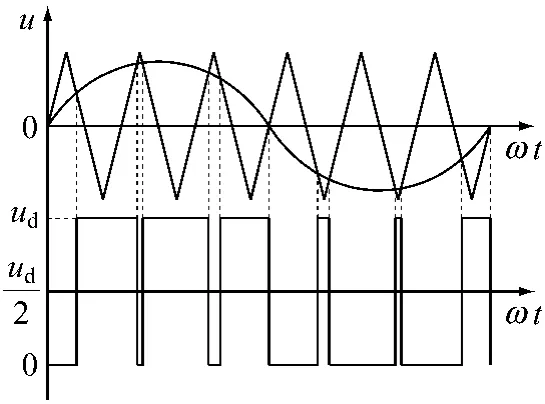
图1 SPWM生成原理
在数字系统中,一般按照规则采样法的原则来实现,如图2所示。

图2 规则采样法原理
设三角载波Uz的幅值为1,正弦波调制信号为:

则可由图2中相似三角形得到:

可得取样时刻SPWM的脉冲宽度为:

式中:M——调制深度;
U——调制波的幅值。

当M>1时,比较器的输出处于饱和状态,此时,输出的基波分量幅值就不与调制函数(4)的值成比例关系,从而造成波形发生畸变,谐波成分增加。因此,当调制深度为1时,在星形连接的绕组中,相电压us可以达到最大值,为直流母线电压的一半Udc/2。
定义线性调制比为:

易见,在SPWM模式下,最大线性调制比为1。
SVPWM的基本思想,是通过8组三相电压式逆变桥的基本电压矢量(000、001、010、011、100、101、110、111,其中 0 表示上桥臂关断,1 表示上桥臂导通)在静止α-β坐标系中来合成定子相电压矢量us。
将8组基本矢量按照开关管动作最小的顺序进行排列,其中u1~u6表示基本矢量,其模长为Udc2/3。u0、u7分别表示000 与111,为零矢量,相当于电机的输入端短路,则其基本矢量关系如图3所示。

图3 SVPWM基本矢量关系
以图3中的定子电压矢量位置为例,根据伏秒原则,可有:

其中 T0、T2、T3、T 分别表示 u0、u2、u3、u 的作用时间。
将伏秒的乘积向β轴投影,可得:

进而可得:

同理可得:

隐含条件:

将式(7)、(8)代入式(9)、(10)可得:

其中2π/3≤θ≤π,则在该取值范围内,us可以取到的最大值为由对称性,该结论可以推广到其余五个区间。由该结论可知:
(1)定子相电压可以达到的区域为该六组基本矢量所构成的六边形的内切圆,如图4所示;

图4 定子相电压区域图
(3)按照式(5)的定义,与SPWM相比,SVPWM模式下的最大线性调制比大于1,相当于拓宽了其线性调制范围。
2 试验平台建立
2.1 试验条件分析
为了能够准确地比较两种调制波的性能,试验必须在仅由单一要素影响的情况下进行,即要创造条件,使影响电机转矩性能的因素只有调制模式。
尽管目前对于交流同步电机的控制有FOC、DTC等诸多控制算法,但在试验中,由于各种算法所依托的调制模式不同,以及算法本身对电机的影响不同。因此,如果采取特定的算法,会使得试验失准。该试验采用他控式开环变频调速系统来进行验证。
同步电动机中,转子转速n(r/min)与定子电流的频率f严格按照:

式中:p——电机极对数。
在他控系统中,转子的转速完全由定子频率决定。由电机统一理论来看[3],电机的转矩为:

式中:k——与电机本体相关的常量:
Fs,Fr——分别为定、转子的磁动势;
φ——定转子之间磁动势的夹角。
按照功率守恒的原则,电源输入的有功功率等于电机消耗的实际功率。因此,在相同的定子电流频率,母线电压,以及相同的负载转矩的情况下,通过观察相电流,即可观察两种调制方法的效果。
由永磁同步电机的电磁转矩公式[4]:

可见电流的稳定性,也可反映出转矩的稳定性。
2.2 硬件平台建立
由于本文采用开环变频调速系统,故不需要光电编码盘及控制器的AD模块。硬件电路在设计上主要是为了配合复杂的控制算法,包括三个部分:主电路、控制电路、隔离电路。系统基于英飞凌XC164CM建立,其基本原理如图5所示。

图5 硬件电路基本框图
为了使MOSFET的开通关断更为迅速,本文使用IR2181作为驱动芯片,其工作电压范围为10~20 V,可用于工作电压在600 V以下的N型MOSFET和绝缘栅双极晶体管(IGBT)等功率器件,IR2181有两路输出可用于驱动逆变器一相电路中的上下两个MOSFET,可输出的最大正向峰值驱动电流为1.9 A,而反向峰值驱动电流为2.3 A,这一性能大大提高了MOSFET的开通、关断性能。主电路原理如图6所示。
本文使用ACS712ELCTR-05B-T电压型霍尔电流传感器来实现对相电流的观测。该传感器的输入信号量程为-5~5 A,输出信号以2.5 V为基准,灵敏度为185 mV/A。其原理如图7所示。
在观测时,可以直接对传感器的输出端进行观察。
2.3 软件平台建立
主程序流程图如图8所示。
通过英飞凌定时器T12模块来实现频率的改变,其程序基本思路如图9所示。
其中,T12 定时器的中断周期为 50 μs[5],PWM的周期也为50 μs,母线电压采用24 V。SPWM与SVPWM子程序,可以分别按照上述介绍的原理进行编写,在此不作详述。
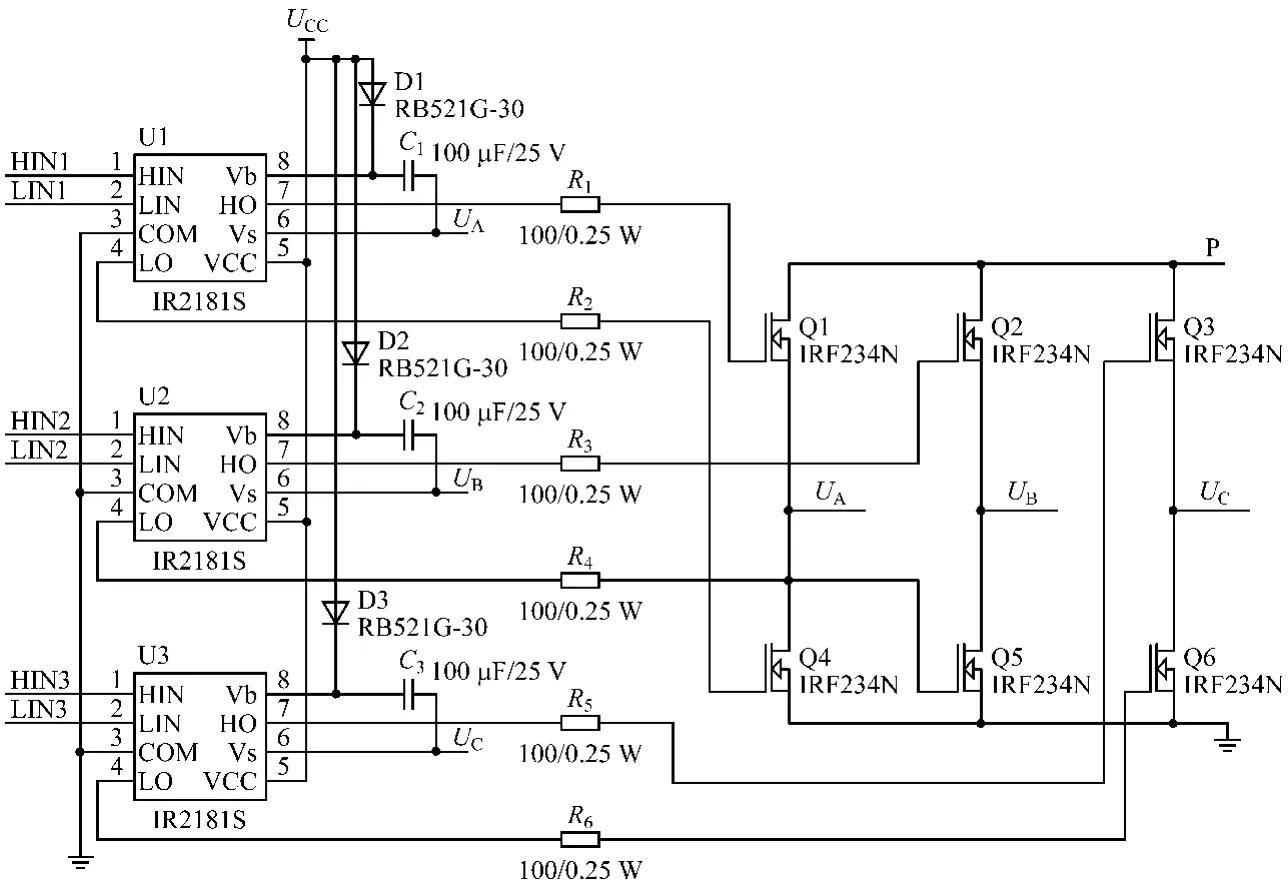
图6 主电路原理图
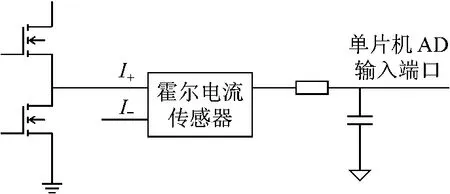
图7 霍尔电流传感器原理

图8 主程序流程图
PWM函数执行时,调制波的平滑程度取决于每次增加的角度大小。将转子旋转一周的位置取值越多,得到的调制函数就越平滑。本文为得到较好的调制波波形,将圆周分为2 048个位置,每一次执行PWM程序,角度增加约0.176°。
在定时中断子函数中,上限值通过电位器调节,利用单片机自带的AD模块进行处理。当AD的值为0时,上限值设置为1。通过该上限值的调整,即可调整定子磁场的旋转频率,以实现变频调速。
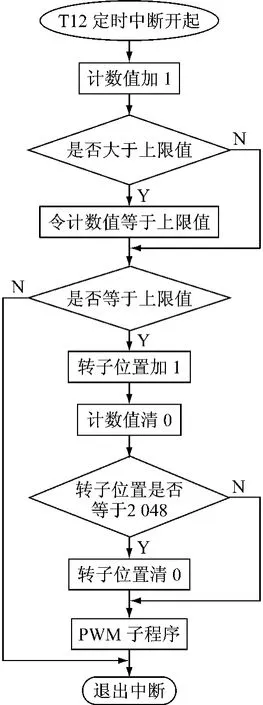
图9 T12定时中断流程图
3 试验结果及分析
单片机侧输出的PWM波,通过RC低通滤波器之后,可以发现在SVPWM原则下,隐含的调制波波形为鞍形波,如图10所示。此时所采用的线性调制比约为1.083,即此时的us=13。
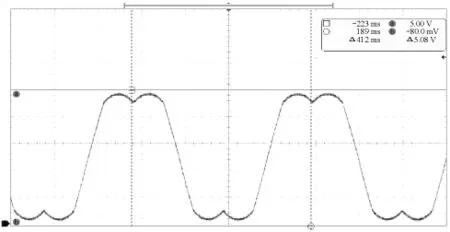
图10 SVPWM中隐含的调制波
本文中,试验样机为上海埃依琪公司提供的空心杯无刷直流电机,额定电压24 V,额定电流2 A。负载由同轴相连的一台功率为140 W的直流电机提供,通过改变直流电机的外接电阻来改变负载。在给定转速为146 r/min,调制深度为0.5的条件下,分别通过电流传感器对相电流进行观测,图11为SPWM控制下的A相电流波形,图12为SVPWM控制下的A相电流波形。

图11 SPWM控制下的相电流波形
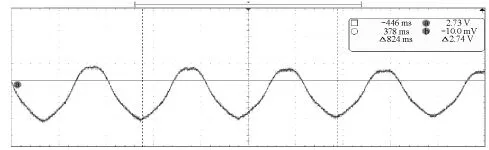
图12 SVPWM控制下的相电流波形
由图可见,SPWM控制下的相电流采样,幅值要大于1 V,而SVPWM控制下的相电流采样,幅值在1 V以内。SPWM控制下的相电流波动也明显要比SVPWM控制下的相电流波动要大。进而说明,在SVPWM模式下,电机的运行要比SPWM模式稳定,同时电源利用率要高。
本试验中使用WYJ-S 30V/3A的稳压电源。在给定24 V的电源后,在负载和转速保持不变的前提下,通过改变SVPWM中的线性调制比r,可改变定子电流,如表1所示。
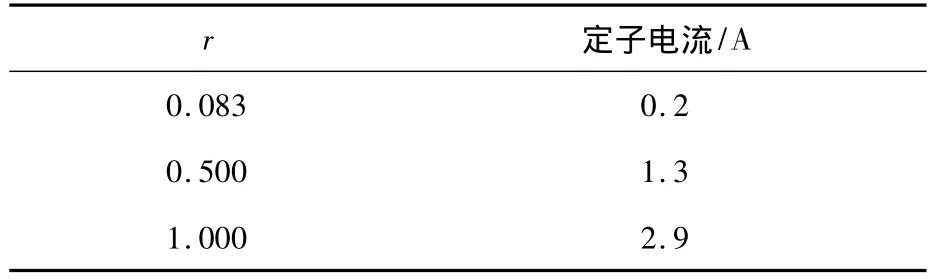
表1
根据式(13),定子电流可达到的最大值越大,电机的电磁转矩可达到的最大值也越大。因此线性调制比越大,电机出力越大。
4 结语
本文在他控变频调速系统中,分别由SVPWM与SPWM来进行空心杯电机的试验,通过对试验结果的分析可得出以下结论:
(1)SVPWM较SPWM对电压的利用率高,一方面表现在其过调制能力上,还表现在当调制深度相同时,SVPWM控制下,相电流的有效值要更小;
(2)从相电流波形的波动来看,SVPWM较SPWM可以更好地抑制转矩脉动;
(3)在给定电压幅值不变的情况下,在稳态条件下,影响相电流幅值的量即为线性调制比,调制比越大,相电流的幅值越大,电机的出力也越大。
[1]陈国呈.新型电力电子变换技术[M].北京:中国电力出版社,2004.
[2]李志民,张遇杰.同步电动机调速系统[M].北京:机械工业出版社,2001.
[3]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,2008.
[4]吴志红,朱元,王光宇.英飞凌 16位单片机XC164CS的原理与基础应用[M].上海:同济大学出版社,2006.
