三维激光扫描系统点云数据向AutoCAD数据格式的转换
2010-11-15赵威成
赵威成
(黑龙江科技学院 资源与环境工程学院,黑龙江 哈尔滨 150027)
三维激光扫描系统点云数据向AutoCAD数据格式的转换
赵威成
(黑龙江科技学院 资源与环境工程学院,黑龙江 哈尔滨 150027)
Cyra三维激光扫描系统是一种先进的测绘仪器,但由于它所采集的数据量过于巨大,当需要将它采集的点云数据在AutoCAD平台进行处理时,普通的个人电脑还无法运行如此海量的数据,以在辽宁省阜新市热电厂采集的管线数据为例,采用数据分割、稀化等手段,解决点云数据在AutoCAD平台上无法正常应用的问题,总结出一种切实可行的技术方法。
三维激光扫描系统;点云数据;AutoCAD;数据格式转换
Cyra三维激光扫描系统由Cyrax三维激光扫描仪和Cyclone扫描软件组成。在Cyrax三维激光扫描仪内,有1个激光脉冲发射体,2个反光镜快速而有序地旋转,将发射体发出的窄束激光脉冲依次扫过被测区域。测量每个激光脉冲从发出到被测物表面再返回仪器所经过的时间来计算距离,同时编码器测量每个脉冲的角度,可以得到被测物体的三维真实坐标。将每个点实时显示在电脑显示屏上,就形成了被测物体的点云图。利用Cyclone软件可快速将点云图部分或全部转换成三维模型、二维平面图、等高线图或断面图等,数据可在A utoCAD软件平台上直接使用,也可用Cyclone软件在点云图内直接完成三维交互式可视化检测及概念设计。
虽然Cyra三维激光扫描系统采集的点云数据可以在A utoCAD软件平台上直接使用,但存在点云数据量巨大,普通的个人电脑无法运行如此海量数据的问题。本文以作者在阜新热电厂采集的点云数据为例,研究点云数据向AutoCAD数据格式转换的方法。外业采集到的点云数据经配准处理后得到的效果图如图1所示。
由于扫描时使用的点行距为8 mm,列距为6 mm,所以经过匹配后的误差最大不超过8 mm。经过验证此次的匹配误差最大为1 mm,符合要求。
1 点云数据转换为AutoCAD格式
在Cyclone软件下对点云数据做一些特殊的处理不是很方便,例如,管线建模,所以需要对点云数据进行处理使之转换成为AutoCAD格式,在CAD平台上进行进一步的处理工作。

图1 经过匹配的点云
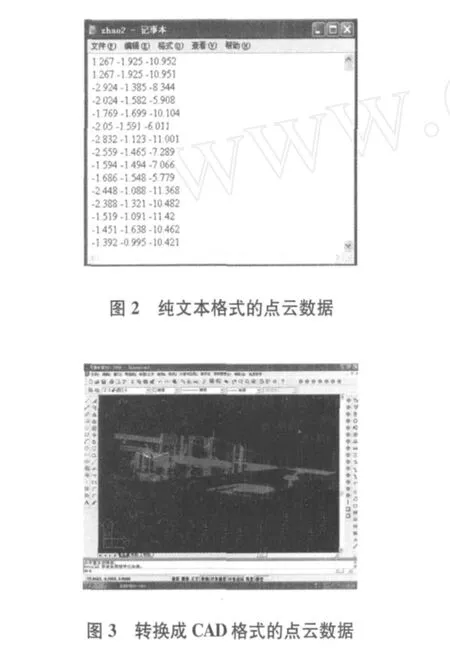
转换方法:首先把剔除干扰点后的点云数据转换成为纯文本(.txt)格式(见图2),然后再转换成CAD格式(见图3)。
2 点云数据的处理
转换成为AutoCAD格式的点云数据由100多万个点组成,对个人用户而言,这些数据量实在是太大,影响到用户对点云数据进行建模,所以要对数据进行处理。
要对点云数据进行操作,在AutoCAD肯定是不合适的,海量的数据使得CAD的操作变得十分缓慢,所以要处理这些点云数据,依然要在Cyclone软件下进行。
本文采取的对点云数据进行处理的方法如下:
2.1 对点云数据进行分块化处理
把点云数据分块就是把整个的点云数据分成一个一个的小模块。在分块的时候要注意的是最好按照一根完整的管线把点云数据分成小模块,不要按照网格进行分块(见图4)。
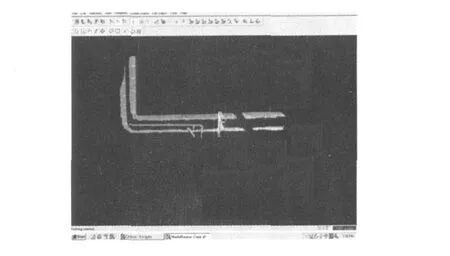
图4 分成小模块后的点云数据的一部分
2.2 模块间的拼接
本文采取的方法是将分成小模块的管线分别进行建模,所以这就要涉及到这些模块在建模后进行拼接,合成一幅完整的管线图的问题。为解决这个问题,在将点云数据分成单独的小模块的时候,要对这些数据进行一些特殊的处理。
将点云数据分块处理的时候,在分接处上要进行一些处理,简单的说就是在分接处设立3~4个参考点,作为两个相邻模块的公共点,当进行接图的时候就利用这几个参考点,如图5~7所示。
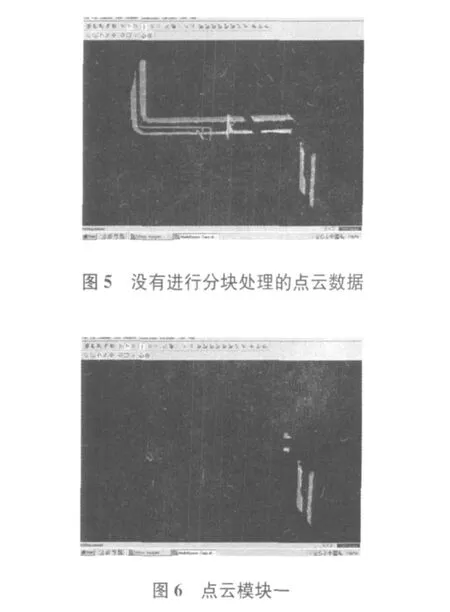
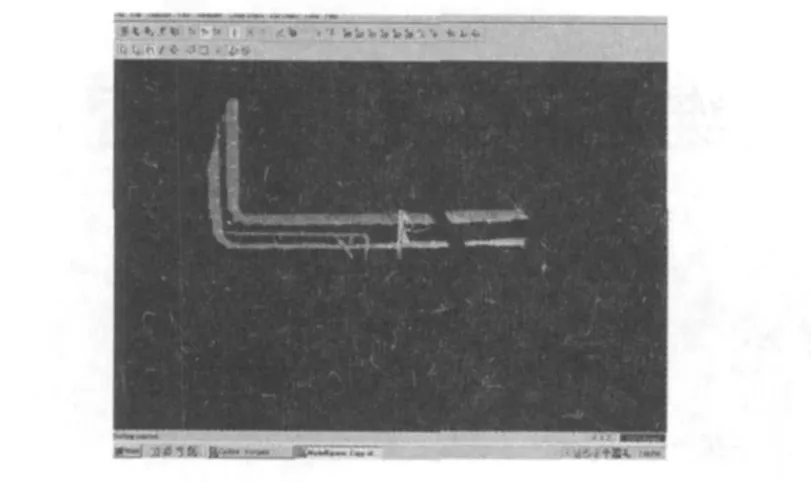
图7 点云模块二
2.4 数据稀化处理
从图2的数据表中可以看出,有很多点 X、Y、Z坐标相差有限,只在毫米级时有差别,作为管线数据这些点都是多余的,所以可以对点云数据进行稀化(筛选)处理,这样就可以大量减少数据量。为了做到自动、高效地筛选有用的点云数据,本文使用VC++开发了一个简易的点云数据稀化(筛选)工具,如图10所示。
图中的蓝点代表的是3个参考点。
选择参考点规则:
1)选取的参考点不能在一条直线上;
2)选取的参考点要尽量在显眼位置或是管线的顶端;
3)参考点间距要在适当范围内取最大值。
2.3 数据的进一步处理
在上面讲述了对点云数据的处理,虽然将点云数据分成了模块,减少了单个模块的数据量,但是对用户来说,数据量还是太大,如图4所示的点云模块有30多万个点,影响到用户对其操作,所以要对数据进行进一步的处理。
从图5中可以看出,除去管线端点和弯头等特殊部分,去掉其余的部分还是可以完成管线的建模操作的,可以大大减少点云数据的数据量,如图8、图9所示。
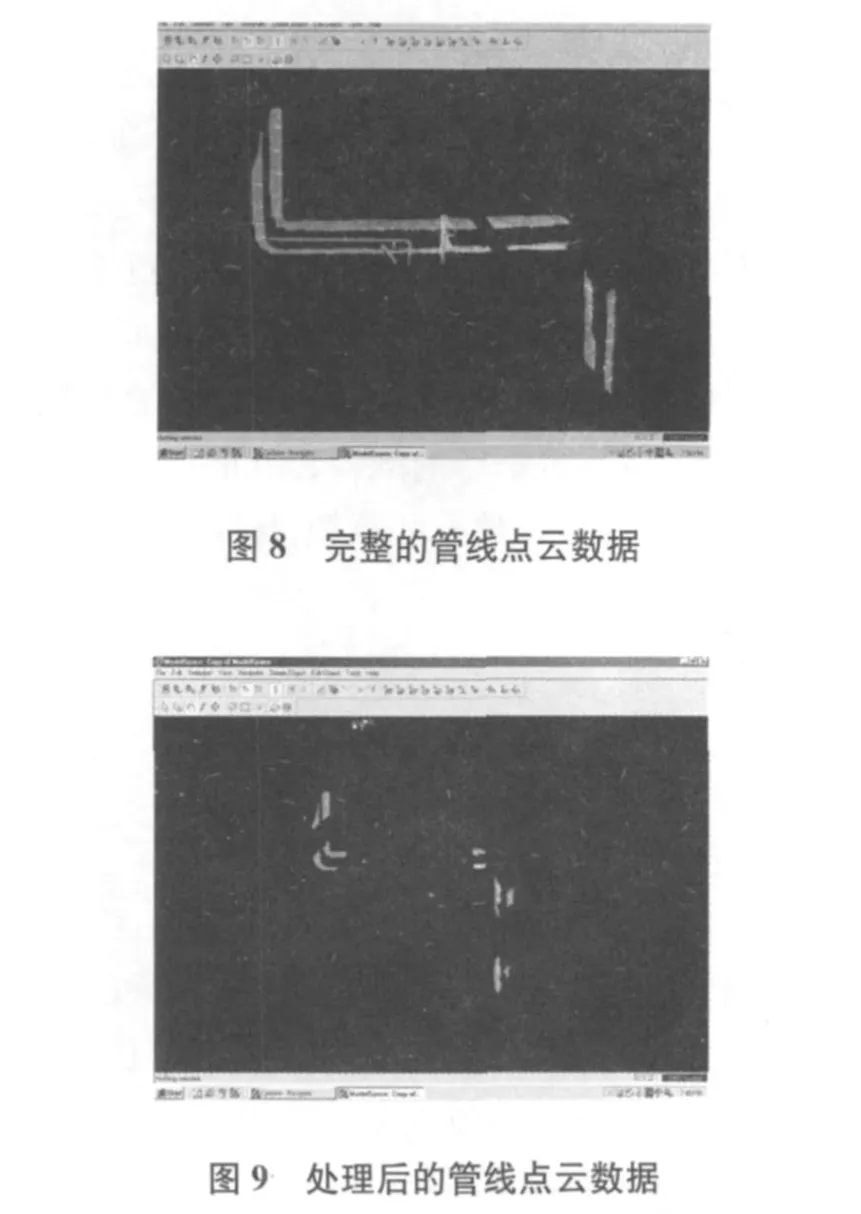

图10 处理点云数据文件
此方法是根据坐标值(x,y,z)3个方向,将点云数据划分为若干个小长方体。每个小长方体区域内的数据点的缩减准则是:通过分析和计算,确定出小长方体区域内的重心点,保留此重心点,删除多余点。
确定小长方体区域的重心点的方法是:①对小长方体区域内的所有点进行计算,确定出这些点的中点位置;②计算所有点到中点的距离,距离最短的点就为重心点。
2.5 最终的AutoCAD格式成果图
将处理后的管线点云数据导出,转换成为AutoCAD格式的点云数据,如图11所示。经过上述方法处理后的点云数据由最初整体的100多万个点坐标,成为最终单模块的3万多个点坐标,完全可以在AutoCAD平台上进行方便、快速的处理操作。
图11 经过处理后AutoCAD格式的管线数
3 结束语
Cyra三维激光扫描系统是空间点阵扫描技术和激光无反射棱镜长距离快速测距技术的发展而产生的一项新测绘技术。它可以快速高效地获取测量目标的三维影像数据,使得测绘技术人员突破传统测量数据处理方法,进行新的数据挖掘和开发研究。它是继GPS空间定位技术后的又一项测绘技术革新,将使测绘数据的研究内容、研究方法进入新的发展阶段。因此,Cyra三维激光扫描系统在测绘领域具有广泛的应用前景。三维激光扫描测量成果的后处理及与A utoCAD的结合已形成新的研究方向。
[1]郑德华.点云数据直接缩减方法及缩减效果研究[J].测绘工程,2006,15(4):27-30.
[2]范海英,杨 伦,邢志辉,等.Cyra三维激光扫描系统的工程应用研究[J].矿山测量,2004(3):16-18.
[3]黄承亮,吴 侃,向 娟.三维激光扫描点云数据压缩方法[J].测绘科学,2009,34(2):142-144.
[4]张远智,胡广洋,刘玉彤,等.基于工程应用的3维激光扫描系统[J].测绘通报,2002(1):34-36.
[5]郑德华,雷伟刚.地面三维激光影像扫描测量技术[J].铁路航测,2003(3).
Study on the transformation of data format from point cloud data for 3D laser scanning system to Auto CAD
ZHAO Wei-cheng
(College of Resource and Environment Engineering,Heilongjiang Institute of Science and Technology,Harbin 150027,China)
Gyra-3D Laser Scanning System is an advanced mapping apparatusw hich is w idely used to collect data w hose amount is usually immense.W hen the point cloud data is required to be dealt w ith on the flat roof of Auto CAD,it is hard for ordinary personal computers to run such a large amount of data,w hich causes a big p roblem of data p rocessing.Ow ing to this,on the basis of the data of coup ling pumps collected at the thermoelectricity factory in Fuxin city of Laoning p rovince,the author of the paper solved the p roblem through data segmentation and data dilution,etc.and concluded a p ractical and feasible technic of the transformation of data format.
3D laser scanning system;point cloud data;Auto CAD;transfo rmation of data fo rmat
TP391
A
1006-7949(2010)01-0025-03
2009-05-07
赵威成(1981-),男,助教,硕士.
[责任编辑刘文霞]
