几种常见数字航摄仪的分析与比较
2010-11-15宫照
宫 照
(武汉大学 测绘学院,湖北 武汉 430079)
几种常见数字航摄仪的分析与比较
宫 照
(武汉大学 测绘学院,湖北 武汉 430079)
数字航摄仪是直接获取高精度数字影像的重要手段之一。文中介绍当前国际上3种主流数字航摄仪ADS40(Airborne Digital Sensor 40)、DMC(Digital Mapping Camera)及U ltraCamD(UCD),并分析三者的成像原理及关键技术,同时从多个方面对三者进行评估和比较。
数字航摄仪;DMC;U ltraCamD;ADS40;性能对比
数字影像的获取是全数字摄影测量的第一道工序,数字影像质量的优劣直接影响后续各工序及最后成品[1]。如何更有效、更经济、更方便且高精度地获取数字影像,是数字摄影测量发展的关键技术之一,为此,数码航摄像机应运而生。数码航摄像机的推出与成功应用,已成为航空摄影测量的又一个里程碑。
1 数字航摄仪技术原理及其发展现状
数字航摄仪是利用一种电荷耦合器件(CCD),将镜头所成影像的光信号转化成电信号,再把这种电信号转化成计算机可以识别的“数字信号”记录下来,最后转换成影像。在数字航摄仪中,CCD传感器相当于航空胶片,其实质是按某种规律排列的MOS(金属—氧化物—半导体)电容器构成的移位存贮器,如图 1所示。MOS是 CCD的基础,CCD感光的过程就是光子冲击感光元件产生信号电荷,并通过 CCD上 MOS进行电荷存储传输的过程。
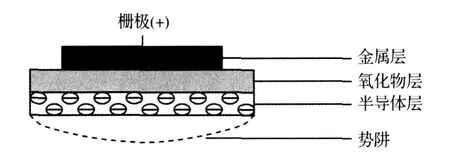
图1 MOS结构示意图
CCD传感器是数字航摄仪的核心元件,是由为数众多的微小光电二极管构成的固态电子感光部件。光电二极管的排列方式有2种,一种是平面阵列,众多光电二极管排列成一个平面,同时感受光信号;另一种是线状阵列,多个光电二极管排列成一条直线,逐行进行感光成像。
面阵CCD传感器获取图像的方式如图2所示,它与框幅式摄影机相似,某一瞬间获得一幅完整的影像,是一个单中心投影。线阵传感器获取图像的方式如图3所示,线阵列方向与飞行方向垂直,在某一瞬间得到的是一条线影像,一幅影像由若干条线影像拼接而成,又称为推扫式扫描成像。
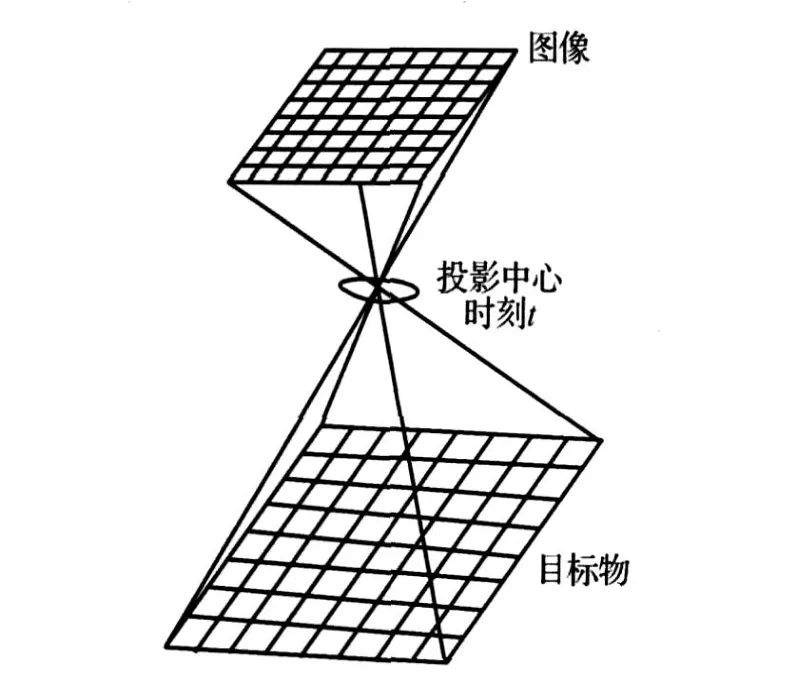
图2 面阵传感器成像方式
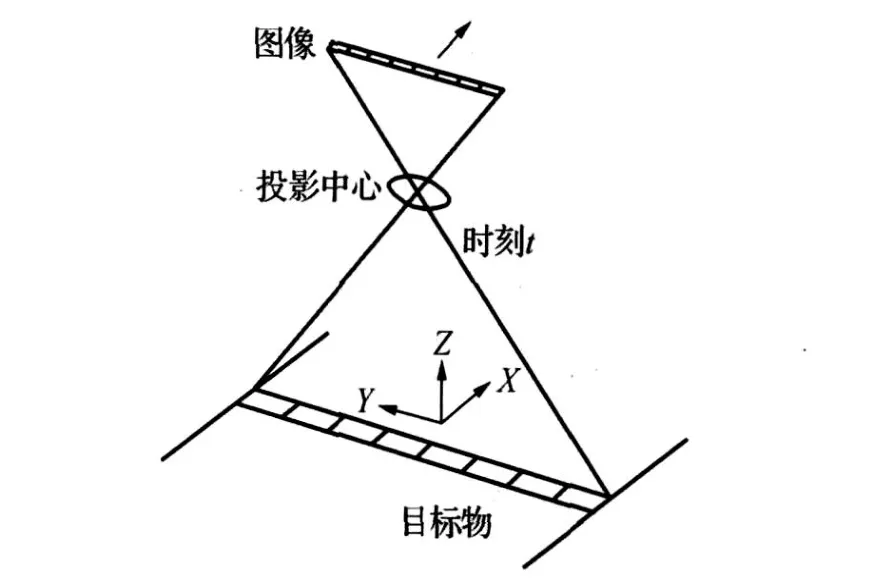
图3 线阵传感器成像方式
目前,国际上主流的数码航摄像机的生产厂商及其产品主要包括VEXCEL Imaging公司生产的U ltraCamD大像幅数码航摄像机、Z/I Imaging公司生产的DMC大像幅数码航摄像机、Leica公司生产的ADS40推扫式数码航摄像机,除此之外,还包括IGI公司生产的DigiCAM 14K小像幅数码航摄像机,以及DiM AC小像幅数码航摄像机等[2]。
2 数字航摄仪与传统航摄仪的比较
目前,数字影像主要是通过传统的胶片扫描数字化来获取。传统的胶片航摄仪体积大、价格高、周期长、效率低,而基于数码相机的数字摄影仪体积小、价格低、周期短、效率高,这种数字摄影仪已成为当前的研究热点[3],二者的能力对比分析见表1。

表1 数字航摄仪与胶片式航摄仪的能力对比分析
3 数字航摄仪的结构与工作原理
数字航摄仪虽然都是获取数字影像,但是各类像机在成像原理和工作流程上有所不同,下面介绍3种主流的数码航摄像机(U ltraCamD,ADS40,DMC)的工作原理。
3.1 DMC
卡尔蔡司(CarlZeiss)和德国鹰图交互计算机图形系统的子公司Z/I Imaging合作,在2000年推出数字航摄仪(Digital M apping Camera,DMC)。该系统是一种可用于高精度高分辨率的航空摄影测量任务的系统。DMC镜头系统由8个镜头组合而成(见图4)。其中4个全色镜头,4个多光谱镜头(红、绿、蓝以及近红外)。每个单独镜头配有大面阵的CCD传感器,4个全色镜头的CCD传感器为7K×4K,4个多光谱镜头的CCD传感器为3K×2K[4]。
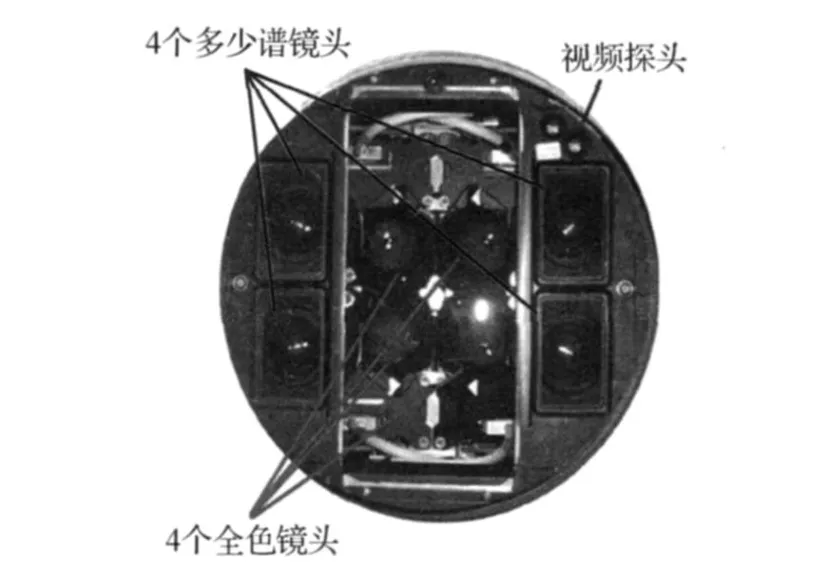
图4 DMC的镜头系统
DMC数码航摄相机的镜头部分,全色镜头沿飞行方向呈2×2矩阵排列,每个镜头对应一个尺寸为4 096×7 168像素的CCD阵列。全色镜头所获取的子影像间存在一定程度的重叠,子影像通过后处理和拼接之后生成模拟中心投影的虚拟影像。多光谱镜头环绕全色镜头排列,获取竖直影像,多光谱影像与全色影像的覆盖范围相同,但分辨率较低。因此,DMC影像是面阵CCD成像方式,但不是严格的中心投影。
3.2 U ltraCamD
U ltraCamD数字航摄仪,由Vexcel公司出品,也是采用多镜头组成的框幅式数字航摄仪,一次摄影可同时获取黑白、彩色和彩红外影像。U ltra-CamD数字航摄仪的成像原理基于传统航摄仪的中心投影,采用了8个小型镜头,相机底部中央由4个镜头组成全色波段镜头组,周围布置了4个焦距为28mm的镜头,负责对R、G、B和近红外波段感光。
U ltraCamD的4个全色镜头沿飞行方向排列,对应的9个面阵CCD呈3×3排列。当第一个镜头到达预定地点时,正中心1个CCD被曝光;随飞机的飞行第2个镜头到达相同位置,四角的CCD以及R和B镜头对应CCD曝光;第3个镜头到达时上下2个CCD以及 G和N IR镜头对应CCD曝光,第4个镜头到达时左右2个 CCD曝光(见图5)。各CCD所获取的影像根据重叠部分精确配准,消除曝光时间误差造成的影响,生成一个完整的中心投影影像。
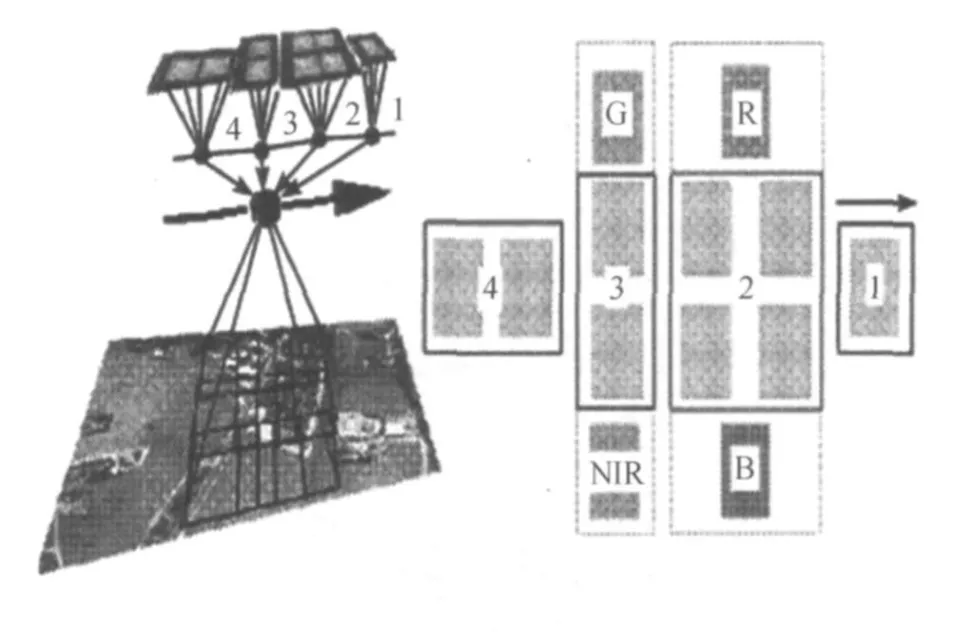
图5 UltraCamD的成像过程
3.3 ADS40
ADS40(Airborne Digital Sensor)由瑞士LH公司与德国宇航中心DLR联合研制,相机上集成了GPS和惯性测量装置(IMU),可以在无地面控制的情况下完成对地面目标的三维定位[5]。ADS40相机采用单个镜头成像,其镜头口径更大,采用的CCD成像器件是线阵式排列。ADS40的成像方式不同于传统航摄仪,它得到的是多中心投影影像,每个扫描线对应单独的投影中心,拍摄到的是一整条带状无缝隙的影像,同一条航线的影像不存在拼接问题。
ADS40成像的最大特点就在于它的全色波段采用了前视、下视和后视3个方向同时获取影像的办法(见图6)。其中,前视方向与下视方向的夹角为28.4°,后视方向与下视方向的夹角为14.2°,加上RGB和近红外4个波段,这样使得ADS40可以利用一次飞行获得丰富的影像信息[6]。
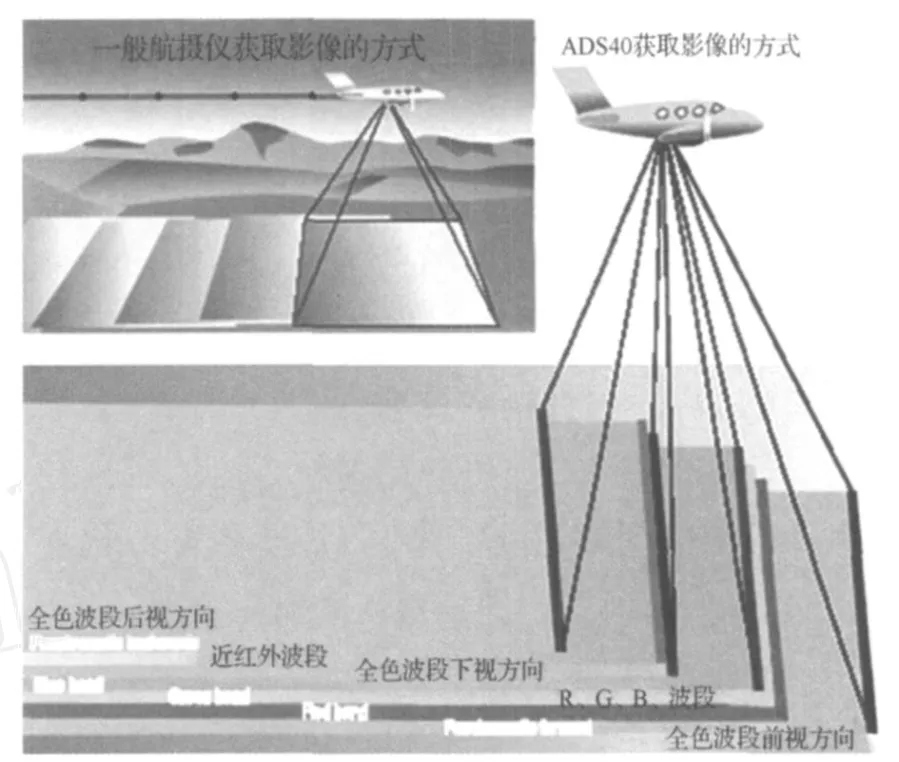
图6 ADS40成像条带示意图
4 几种航摄仪的比较
4.1 基本参数的比较
随着数字成像技术的发展,数字摄影仪必将取代胶片摄影仪,在胶片摄影中的一些技术参数将不再适用于数字摄影。几种数字航摄仪的基本参数比较如表2所示。
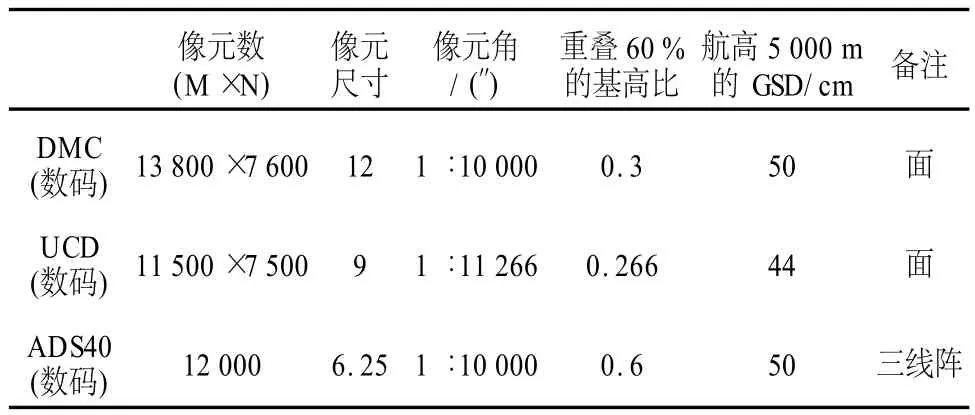
表2 目前常用的航摄相机及有关基本参数[6]
4.2 成像原理的比较
ADS40采用的是线阵式CCD推扫成像,通过在焦平面安置分光镜组件和多条CCD线阵,一次飞行可以同时获取全色前视、下视、后视,R、G、B和近红外波段的影像。ADS40的影像质量必须依赖于IM U/DGPS技术。DMC和 U ltraCamD的成像方式类似于传统的框幅式成像,所不同的是DMC和U ltraCamD拍摄到的每张影像是使用拼合或者融合方式获取的。
成像原理如下:
ADS40:推扫成像,依赖于 IM U/DGPS技术。
DMC:多镜头框幅式成像,不同像主点拼合。
U ltraCamD:多镜头框幅式成像,实现同一像主点的多幅影像拼合。
4.3 后处理系统的比较
DMC的后处理系统包括地面读取航摄数据系统、RA ID阵列、UPS电源、光纤数据线集线器、数据后处理工作站以及可将DMC原始影像转换为其它影像格式的后处理应用软件PPS。地面后处理系统负责下载数据、光谱校正、几何校正及数据处理。
U ltraCamD在后处理阶段采用Vexcel数据后处理软件,进行数据下载,并镶嵌融合。
ADS40的地面数据后处理系统包括飞行任务结束后处理所有数据的工作站以及各种数据后处理软件。主要有:Gp ro、Leica公司的软件,贯穿整个ADS40后处理过程;POSPac-App lanix公司的软件,主要负责处理 IM U/DGPS数据;ORIM A软件进行空三加密。
在数据后处理阶段,由于ADS40采用推扫式成像,对原始影像的后处理计算更为复杂,原有的航片后处理软件都是为处理中心投影的框幅式相片开发的,所以适用于ADS40的商业后处理软件种类比DMC和U ltraCamD少。
4.4 其它比较
1)3种数字航摄仪都可以在一次飞行中获取到全色、RGB和近红外波段的影像。ADS40多数基本配置的系统只能获取全色波段的立体像对。按获取的彩色信息原始分辨率从高到低的能力排序分别是:ADS40—U ltraCamD—DMC。
2)大比例尺“真”正射数字影像图制作应用方面:ADS40可以在垂直方向设置RGB条带CCD,在航向方向近乎“真”正射;U ltraCamD的最短曝光时间间隔为0.75 s,U ltraCamD可以获得高达96%的航向重叠度,在获取“真”正射需要的像片上也有一定的优势;DMC的最短曝光时间间隔为2 s,从这方面应用上要弱。
3)ADS40必须使用IMU/DGPS,DMC和U ltraCamD可以使用也可以不使用 IM U/DGPS。三者都可以实现无(或少)地面控制航测成图。
4)ADS40的 GSD最大为15 cm,适用于农业、林业等遥感应用和中小比例尺制图(目前有材料证明ADS40的GSD也可以达到5 cm);DMC和U ltraCamD为5 cm和3 cm,可用于大比例尺制图和工程应用。
5 结 论
ADS40、DMC、U ltraCamD这些具有代表性的数字航测仪分别具有各自的特点。无论是线阵传感器相机,还是面阵传感器相机,由数字航摄仪代替传统胶片式航摄仪的优势是非常显著的。数字航摄仪主要有以下3个特点:解决大像幅的航空摄影;与定姿、定位传感器的结合;与现有摄影测量系统资源的衔接。
数字航摄传感器集精密光学机械、高速信号处理、海量数据存储与处理和机载 POS等技术为一体,为数字航空影像的获取开辟了一条全新的道路。随着数字航空影像的产生,其深加工环境也需要进一步完善,尤其是相关技术标准、相机检定、后续处理等各个方面有待全面跟上,只有合理调整生产结构,大胆引进软件和技术,合理修订相关标准和规范,全数字的摄影测量才能真正实现。
[1]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉测绘科技大学出版社,1996:2-5.
[2]张祖勋.航空数码相机及其有关问题[J].测绘工程,2004,13(4):1-5.
[3]高光星.数码航摄与传统摄影的比较探讨[J].地理空间信息,2007,5(1):10-13.
[4]袁桂生,智爱玲.数字航摄相机(DMC)在测绘项目中应用的探讨[J].现代测绘,2005,28(4):30-31.
[5]RA INER SANDAU,BERNHARD BRAUNECKER.Design Princip les of The LH System s ADS40 Airbo rne Digital Senso r[A].IAPRS(Vo.l XXXI-II)[C].Am sterdam,2000:75-77.
[6]韩 磊,蒋旭惠.几款数字航摄相机的应用与比较[J].城市勘测,2006(5):21-26.
Analysisand comparison of several common aerial digital cameras
GONG Zhao
(School of Geodesy and Geomatics,Wuhan University,Wuhan 430079,China)
Aerial digital camera isone of the importantmeans to obtain high-p recision digital imaging directly.This paper introduces threemajor aerial digital cameras in the world such as ADS40,DMC and U ltra-CamD;analyzes the main p rincip les and key technologies;at the same time assesses and compares them in several aspects.
aerial digital cameras;DMC;U ltraCamD;ADS40;perfo rmance comparison
P231
A
1006-7949(2010)01-0046-04
2009-06-07
国家863计划资助项目(2007AA 12Z154)
宫 照(1985-),女,硕士研究生.
[责任编辑刘文霞]
