井下全方位潮汐观测技术研究*
2010-11-14李家明姚植桂温兴卫彭宏伟
李家明 姚植桂 温兴卫 彭宏伟
(1)中国地震局地震研究所,武汉 430071 2)地壳运动与地球观测实验室,武汉 430071 3)防灾科技学院,河北 065201)
井下全方位潮汐观测技术研究*
李家明1,2)姚植桂1,2)温兴卫1,2)彭宏伟3)
(1)中国地震局地震研究所,武汉 430071 2)地壳运动与地球观测实验室,武汉 430071 3)防灾科技学院,河北 065201)
井下重力与倾斜全方位观测系统的试验结果表明,其测量分辨力为:重力 0.1×10-8ms-2,倾斜0.000 2″,达到了设计指标要求,能够满足固体潮观测研究和地震监测等的需要。
井下观测;固体潮;重力;倾斜;静电反馈测量
1 引言
当前,地震前兆形变、应变和重力等观测仪器基本上是以洞体观测仪为主,但由于山洞分布不均,相当多需要监测的地区由于没有开凿山洞条件,形成地震前兆监测空白区。为解决监测仪器分布不均问题,只有开发井下观测仪器,实行井下观测。仪器安装在井下,还具有能有效地克服地表环境因素的干扰,温度稳定,背景噪声小,易提高观测精度,仪器占地面积小,对地质条件限制小,布设周期短和易管理等特点,因此发展井下综合观测技术是地震前兆监测的必由之路[1]。
重力与倾斜资料在地球科学两个主要领域——大地测量和地球物理中有很多种用途。利用全球分布的精密固体潮和非潮汐变化资料研究地球动力学问题,是地学重要组成部分,也为地震监测提供依据。目前,国内外大多数情况是某一观测点只有倾斜仪或只有重力仪分别观测固体潮的 3个分量,这或多或少地只观测了起潮力的垂直分量却忽略了观测起潮力的水平分量,或者情况相反。我们研制放置于井下的重力与倾斜潮汐一体化观测系统,旨在为开展地球深部运动研究和地震监测开发一种新的观测设备,并为深部地球物理研究和地震监测预报提供可靠、高精度与连续的观测数据。
2 系统设计与原理
井下全方位潮汐观测系统,由井下仪器本体、电缆传输线和地表部分的电源、数据采集控制通信主机箱所组成。
井下仪器本体直径为 150 mm,长 1 500 mm,主要由传输电缆、吊环、压力弹簧、支撑爪、倾斜仪、万向调节环、倾斜仪调零装置、重力仪、重力置平装置、定向装置、静电标定装置、控温装置和测量电路单元等部分所组成(图 1)。

图1 井下仪器本体示意图Fig.1 Schematic diagram of the borehole instrument
井下仪器本体中的重力仪和倾斜仪将垂直向的重力及水平两个方向倾斜变化量转换成位移变化量,经电容位移传感器及交流电桥转换为交变电压信号,再经过交流放大器放大到锁相检波放大器变为直流信号,经积分后,一路信号送人静电反馈电路将静电电压信号加到重力仪和倾斜仪电容位移传感器两定极板上,使动极板回到中心位置 (即摆位回零);另一路则经低通滤波器输出送至传输电缆线。测量系统可采用闭环的静电反馈或开环测量方式。测量信号送到地表部分的主机箱中的数据采集器里进行模数转换器,将模拟电压信号变换为数字信号,进行实时数据采集,又经微型计算机接收处理,分别送至显示器进行显示和电子盘存储,并将数据实时地经由无线或有线方式的 Internet网络传送至远方的数据中心进行存储、分析和处理。
2.1 重力测项[2-4]
重力测量原理结构如图 2所示。

图2 重力测量原理结构图Fig.2 Diagram of gravitymeasurement principle
为减小体积,重力仪弹性系统采用了质量平移式线性结构(属弹簧类重力仪),其基本原理是利用弹性力来平衡重力。当重力场发生变化时,挂在弹簧下质量摆的引力发生变化,弹簧的长度也相应发生变化。弹簧的平衡方程为M g=fx,式中M为质量摆的质量,f为弹性强度,x为测量弹簧拉伸长度。由弹簧的平衡方程可导出重力仪变化时弹簧的相对伸长量:dx/x=dg/g。由于重力加速度的变化很小,弹簧的相对伸长量也很小,但质量平移式线性结构没有机械放大作用,因此须有一个高精度的测量微位移系统,测量摆的位置变化。若重力仪观测精度为 1×10-8ms-2,当弹簧的工作长度为 x=100 mm时,位移变化量为 dx=100×(dg/g)=100×10-9mm=0.000 1μm。所以测微器的精度必须优于0.000 1μm。
重力仪采用三片式差动电容位移传感器,上下两定极板与支架连接固定,但相互保持绝缘。动极板的上端与测量弹簧连接,下端与质量摆连接,当重力场发生变化时,引力作用到质量摆上,使得动极板与定极板间的距离发生微小变化。由数字振荡器给上下两定极板加稳幅和稳频 10 kHz左右的正弦基准信号,传感器构成交流电桥,将位移的变化转换为电容量的变化,再又转换为交流电压的变化,经前置放大、选频主放大器、移相器、锁相放大器的放大变为直流信号,静电反馈电路将这一摆位偏移信号再积分放大加到上下两定极板上,迫使动极板回到中心位置,这时静电反馈力等于重力的变化值,另一路则经滤波为重力输出信号。采用静电反馈闭环测量系统[5],消除弹性系统滞后影响,提高了系统的观测精度及其格值稳定度。弹簧重力仪测定重力变化的前提是弹簧的弹性必须高度稳定,为了满足万分之一微米测量精度,弹性系统的弹簧稳定度必须达10-9,因此需要一个高精度的恒温系统来保证弹性系统的稳定性,对恒温精度提出须达 0.000 1℃要求。弹性系统、测量系统和恒温控制系统构成了重力仪的 3个主要部分,3部分的性能指标决定着重力仪的性能。
井下重力测量时,还需设计一套自动置平装置,以保证弹性摆系工作时始终保持铅垂。如将重力仪直接叠加在倾斜仪上,靠倾斜仪的机械调零可以实现重力仪的置平目的,但为了避免相互影响,我们设计了独立的置平机构。自动置平装置采用自动闭环负反馈结构,传感器为二维电子水泡或超小型垂直摆,由伺服电机、涡轮蜗杆驱动,满足了重力仪自动置平要求。
2.2 倾斜测项[6-8]
为减小相互干扰,倾斜测项采用两个相同的独立的垂直摆结构,方向相差 90°,上下层叠加结构(图 3)。
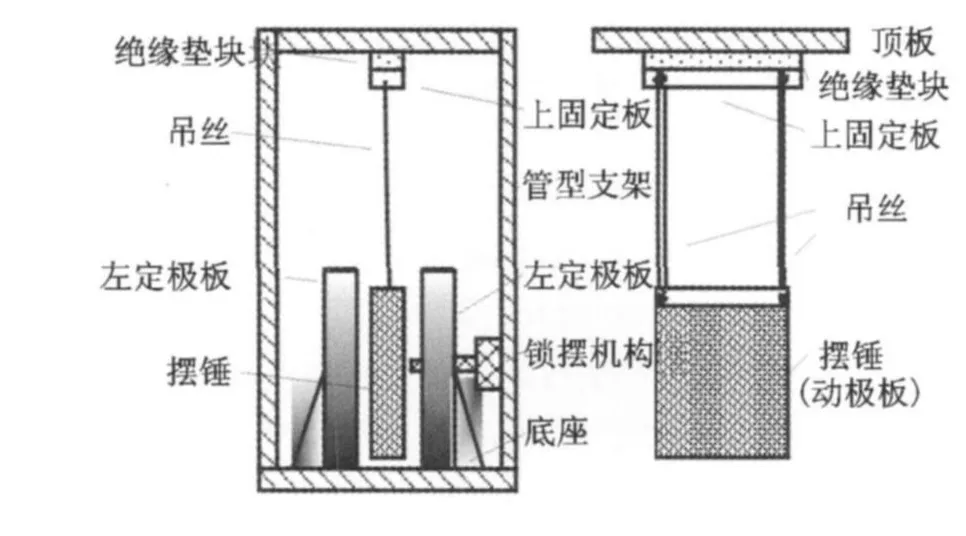
图3 倾斜测量原理结构图Fig.3 Diagram of tiltmeasurement principle
垂直摆倾斜仪的垂直摆由支架、吊丝和摆锤 3部分组成。垂直摆在没有振动的条件下处于铅垂状态,当发生倾斜变化时,摆平衡位置发生变化,摆和支架之间的相对位置发生变化,摆锤本身构成电容式位移传感器的动极板,两定极板与支架的底座连接,相互之间保持绝缘,摆系将倾斜的角度变化转换为位移变化,因此电容位移传感器的动极板与之间的两定极板间距也相应的发生变化,其关系有:Δ ψ =206 265×(Δd/l),式中Δ ψ为倾斜角度,单位为角秒(″),l为摆长,它是由悬挂点上固定板到摆锤 (动极板)重心的距离,Δd为摆垂的相对位移量。通过传感器转换成电信号并加以放大,就可将摆的微小位移转换成电信号。由于地倾斜的相对变化量很小,摆的相对偏移量也很小,因此也必须有高精度测微系统测量摆的位置的变化。高精度的测微系统与重力仪类似,分辨力优于 0.000 1μm,采用相关接收技术的锁定放大器,或静电反馈电路,经滤波输出倾斜信号,使得倾斜测量分辩力优于 0.000 2″。
伺服系统为伺服电机推动二维移动平台的机械调零装置。该装置的检测信号取自倾斜仪检波输出,调零为自动方式,可采用两个方向同时进行,一次完成自动调零,避免了相互影响所致的反复调摆运动。
2.3 测量系统
精密测量系统采用锁相放大开环测量系统[3]和静电反馈闭环测量系统[5]。
静电反馈测量电路原理是:当重力或倾斜发生变化时,电容传感器产生位移偏移信号输出,经检波放大,再积分,一路又送回到电容传感器的两定极板上,并产生静电力,推动电容传感器的动极板,使动极板回到两定极板中心位置 (对称设计时,机械零位与电零位基本重合);另一路经低通滤波,输出则为物理量信号。
静电反馈测量特点是:测量时始终使电容传感器处于零位,这样其灵敏度高、线性范围宽、测量精度高、格值稳定度也高,对传感器本身的信号放大电路要求不高,用于重力测量时能消除弹性系统滞后影响等,不过它不适用于刚性传递信号的测量场合,如应变仪等。
静电反馈测量电路原理图如图 4。由图 4可知,数字振荡器的一路依次连接电容传感器、前置放大器、选频主放大器、相敏检波器;另一路依次连接移相器、方波发生器、相敏检波器,由相敏检波器经积分器 pi到静电反馈器,静电反馈器一路再回到电容传感器,另一路连接低通滤波器输出,形成闭环测量电路。若静电反馈器不接入,将相敏检波器直接接至低通滤波器,而形成开环同步检波放大器。
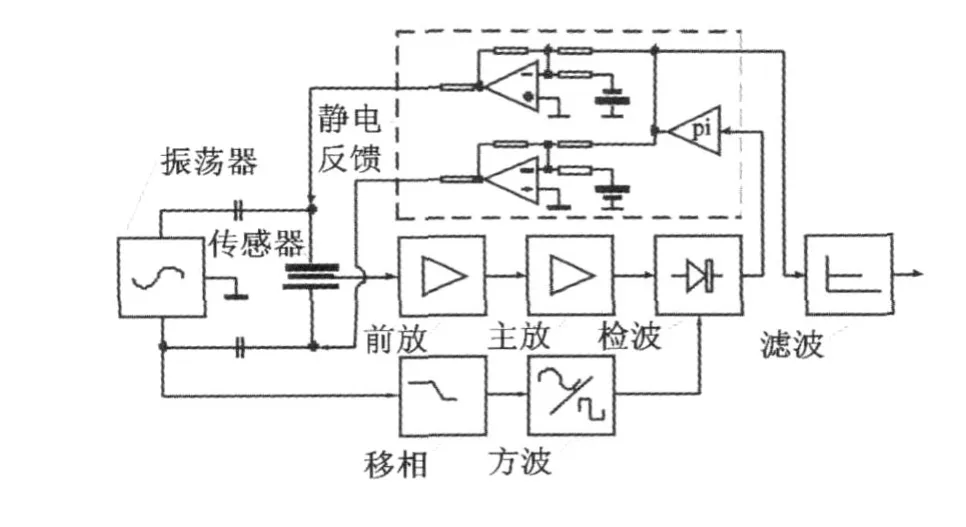
图4 静电反馈测量电路原理图Fig.4 Schematics diagram of electrostatic feedback measurement circuit
3 主要技术指标
1)重力分量
分辨力:≤0.1×10-8ms-2;
准确度:10×10-8ms-2;
零点漂移:≤1 000×10-8ms-2/月;
可调测程范围:≥7 000×10-5ms-2(全球范围)。
2)倾斜分量
分辨力:≤0.000 2″;
零点漂移 <0.005″/天;
量程:±2″;
机械调零范围:>±3°(井斜小于 3°);
系统可自动或遥控实现摆位调零和标定。
4 试验情况
2010年 4月,我们将井下全方位潮汐观测样机,放置于武汉市华中农业大学地壳形变仪器观测站的浅孔井中进行观测试验,经过一段时间的调试和稳定后,该样机除了有些漂移外,已能清晰地记录到重力固体潮、倾斜固体潮汐和地震波 (图 5)。经数据计算处理,该系统已达到了设计精度技术指标。
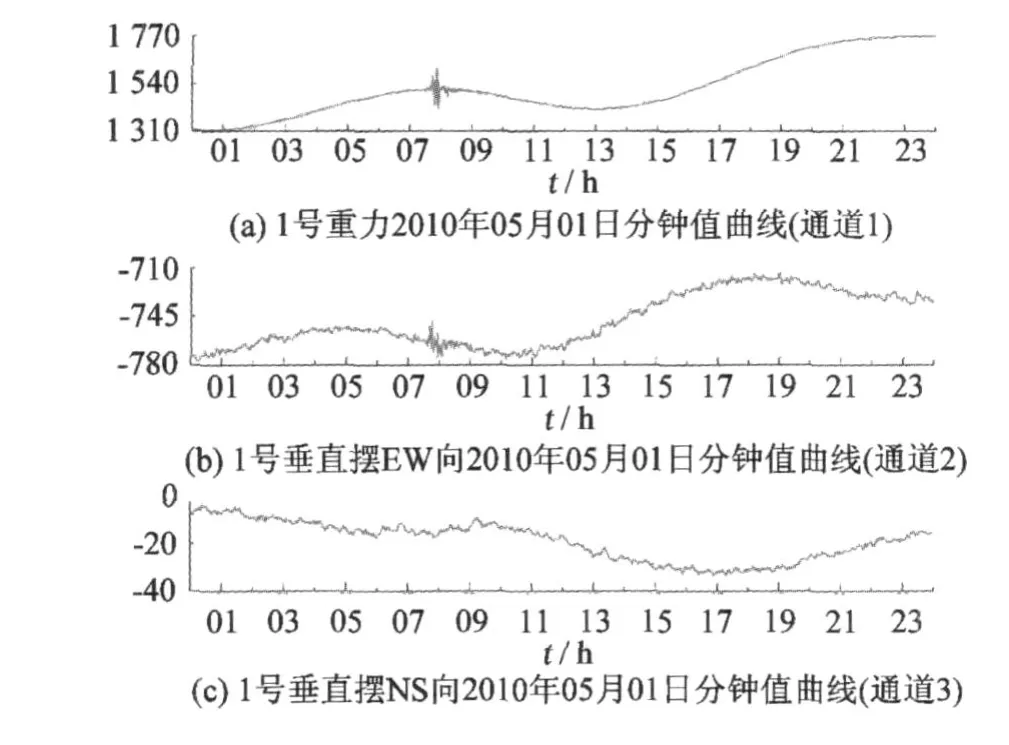
图 5 原始数据曲线(2010-05-01)Fig.5 Curves recorded at Huanong seis mostation
5 结束语
从试验结果来看,井下全方位潮汐观测系统清晰观测到了重力和倾斜固体潮汐,表明该系统已达到了设计指标要求。
致谢 衷心感谢苏恺之、胡国庆、马鸿钧等研究员的指导和帮助!
1 苏恺之,等.钻孔地应变观测新进展[M].地震出版社, 2003.(Su Kaizhi,et al.Borehole strain observations in progress[M].Bering:Seismological Press,2003)
2 Chapin D.Gravity instruments:Past,present,future[J].The Leading Edge,1998,17(1):100-112.
3 李家明,等.DZ W-Ⅱ型微伽重力仪改进设计[J].大地测量与地球动力学,2005,(4):127-132.(Li Jiaming,et al. Reforming design of micro-gal-gravimeter of type DZ W-Ⅱ[J].Journalof Geodesy and Geodynamics,2005,(4):127-132)
4 李家明,等.GS型重力仪智能化和网络化的实现[J].大地测量与地球动力学,2008,(6):127-131.(Li Jiaming, et al.Realization of intellectualization and net work of GS gravimeter[J].Journal of Geodesy and Geodynamics,2008, (6):127-131)
5 Harrison J C and Soto T.I mplementation of electro-static feedback with a Lacoste-Rombergmode G gravitymeter[J]. Geophyr.Res.,1983,89:7 957-7 962.
6 罗峰.VS型垂直摆倾斜仪的设计及其智能化研究[D].中国地震局地震研究所,1999.(Luo Feng.VS verticalpendulum of design and intelligent[D].Institute of Seis mology, CEA,1999)
7 肖俊.高精度垂直摆倾斜仪的设计及应用研究[D].中科院测量与地球物理研究所,2002.(Xiao Jun.High precision vertical pendulum tiltmeter and its appplication[D]. Institute of Geodesy and Geophysics,CAS,2002)
8 吴艳霞.VS新型垂直摆倾斜仪的研究[D].武汉理工大学,2005.(Wu Yanxia.Study of new vertical pendulum tilt meter[D].Wuhan University of Technology,2005)
STUDY ON ALL-D IRECTIONALLY BORE-HOLE OBSERVATION TECHNIQUE OF EARTH TIDE
Li Jiaming1,2),Yao Zhigui1,2),Wen Xingwei1,2)and Pen Hongwei3)
(1)Institute of Seism ology,CEA,W uhan 430071 2)CrustalM ovem ent Laboratory,W uhan 430071 3)College of D isaster Prevention Techniques,Hebei 065201)
The three-dimensional gravity and tiltmeasurement resultswith bore-hole system show that the resolution power of the system are 0.1×10-8ms-2for gravity and 0.000 2″for tilt which reaches the design requirements and can meet the need of the solid tide observation and earthquake monitoring.
bore-hole observation;earth tide;gravity;tilt;electro-static feedback measurement
1671-5942(2010)05-0149-04
2010-09-10
国家自然科学基金(40774025);地震科学联合基金(106003);中国地震局地震研究所所长基金(IS200961367)
李家明,男,1957年生,高级工程师,主要从事地震观测技术研究.E-mail:jiaming6161@sina.com
TH762
A
