近场MVDR聚焦波束扫描声图定位方法研究
2010-09-30王川梅继丹孙磊常哲
王川,梅继丹,孙磊,常哲
(1.海军海洋测绘研究所,天津300061,2.哈尔滨工程大学水声技术国防科技重点实验室,黑龙江哈尔滨150001,3.国家海洋技术中心,天津300112)
近场MVDR聚焦波束扫描声图定位方法研究
王川1,梅继丹2,孙磊1,常哲3
(1.海军海洋测绘研究所,天津300061,2.哈尔滨工程大学水声技术国防科技重点实验室,黑龙江哈尔滨150001,3.国家海洋技术中心,天津300112)
声图测量技术是一种适用于近场的高精度被动定位技术,可以用来测量舰船辐射噪声源位置的空间分布。声图测量的核心算法是聚焦波束形成。算法的分辨力与阵长、信号处理频段以及目标距离有关。当阵长一定、测量区范围给定时,算法对低频声源的分辨力较差。MVDR波束形成法可较常规波束形成获得更高的分辨力,降低旁瓣。采用MVDR与聚焦波束形成相结合的方法可提高对舰船各部位辐射噪声源的分辨力。
水声定位;聚焦波束形成;声图定位;近场MVDR
1 引言
介绍了一种高精度的近场被动定位方法——聚集波束形成被动定位法[1-4],该方法可以用来测量舰艇等目标各部位的辐射噪声源位置,用于检测舰艇各部位的辐射噪声源分布情况。每个噪声源位置在分布图上反映为一个亮点,因此又将测得的噪声源分布图称之为亮点分布图。常规聚集波束形成被动定位方法分辨力与阵长、目标距离和目标频率有关,阵长越短、距离越远、频率越低分辨能力越差。当阵长和目标距离一定时,对低频目标该方法的分辨能力较差。当存在多个目标时容易产生混叠现象,无法分辨出多个目标,影响定位精度。20世纪60年代末Capon提出了MVDR高分辨定向方法[5],即最小方差信号无畸变响应法。MVDR波束形成器[6-10]是线性约束最小方差(LCMV)波束形成器的一种特例,是在保持对某个方向来波响应不变的情况下使波束形成器输出平均功率最小。不同于普通波束形成,在信噪比不是很低的情况下MVDR可以明显降低波束的旁瓣,提高分辨力。对舰船辐射噪声源分布的测量一般是在近场,满足高信噪比要求。然而,近场对于MVDR波束形成器来说相当于阵形畸变,且传统的MVDR波束形成器由于受相位模糊的问题影响是不能采用稀疏阵的,因此对于近场稀疏阵形要采用近场修正MVDR波束形成[2],将其用于近场聚焦波束扫描,以期获得更高的分辨力和定位精度。仿真研究表明近场MVDR聚集波束形成可以明显的降低旁瓣,使主瓣变窄,提高分辨力。
2 聚焦波束扫描声图定位原理
常规的波束形成[11]技术是基于远场平面波假设的,时延差补偿量只与方位有关,因此被称为空间的方位滤波器,无法进行测距。而聚焦波束形成技术则是基于球面波假设的,根据测量区内不同方位和距离对时延差进行球面波补偿,可以得到不同位置的波束输出,称为扫描,该方法既可测向又可以测距。如果将基于平面波模型的波束形成看成一维(目标方位)波束形成,那么基于球面波模型的聚焦波束形成就是二维(方位和距离)波束形成。以水平均匀直线阵为例。设阵元间距为d,设阵元数为2M+1,阵元序号(-M~M)。阵形示意图如图1所示。
近场理想条件下,声源声场为球面波,时延补偿量不仅和方位有关,还和目标距离有关,因而应该对a(θ)进行修正。极坐标系中平面聚焦波束扫描示意图如图1所示。
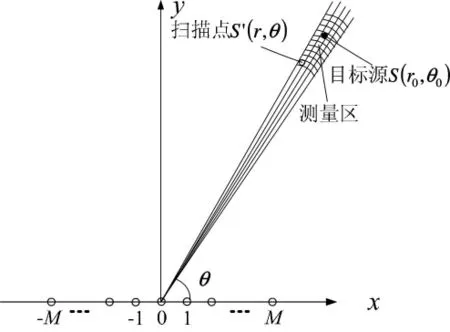
图1 聚焦波束扫描示意图
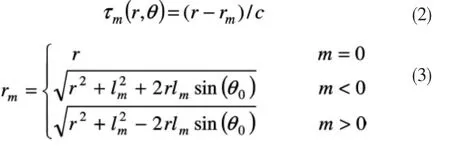
采用声图探针对测量区进行扫描,所谓声图探针即是在声图(目标噪声源空间分布)点源(一个像素)的位置设置一个“驾驶矢量”。声图由各个像素点组成,探针(既“驾驶矢量”)扫遍整个测量区即得到一幅声图。在测量区内根据角度和距离对测量区打网格,每个网格的角度间隔大小代表声图显示的最小角度分辨率,距离间隔量化代表声图显示的最小距离分辨率。设目标位置为(r0,θ0),方位θ0为与x轴正向的夹角,距离r0为声源S到阵中心阵元的斜距,rm0为目标到阵元m斜距。扫描点为(r,θ),rm为该扫描点到阵元i的斜距。lm=md为阵元m到阵中心阵元的距离。声速为c。修正阵列对θ方向目标的方向矢量a(θ)为阵列对空间位置(r,θ)处目标的空间矢量a(r,θ)。

其中:
可得聚焦波束形成各波束的权向量和空间谱为:
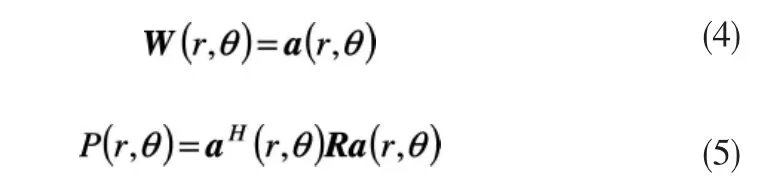
当波束扫描到目标所在点时,r=r0,θ=θ0,权系数使得各路信号恰好同相位叠加,功率输出达到最大,在波束扫描图上反映为一个亮点。由于要进行波束扫描,声图显示的分辨率与网格大小有关,因此要使测量量化误差小网格就要尽量密,如果要对全方位扫描需要巨大的计算量。对此可采取先用广义互相关法测向,粗测目标方位,再在目标粗测方位附近小范围内进行扫描的办法以减少算法计算量[3]。
3 近场MVDR聚焦波束形成
MVDR波束形成意在使噪声以及来自非观测方向上的任何干扰贡献的功率最小,同时又保持观测方向上的信号功率不变。对于窄带信号MVDR波束形成器求解的优化问题可以表述为:

式(6)中min表示取最小值,其约束条件为:WHa(θ)=1,θ为观测方向。此时可得MVDR波束形成的权向量和方位谱为:
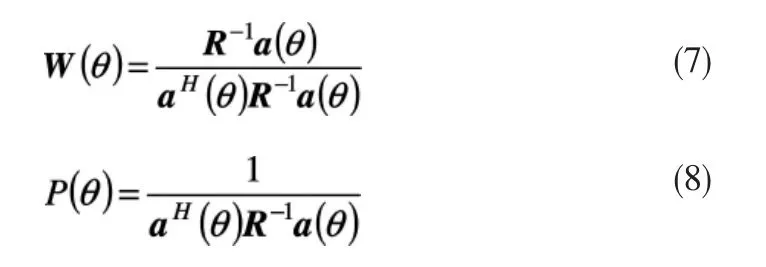
以上为远场情况下的MVDR波束形成。因为MVDR方法对阵形很敏感,且要求小于半波间距布阵,而近场环境又相当于阵形畸变,所以在对于近场稀疏阵环境下也要对远场MVDR模型进行必要的修正。修正方法同常规波束形成方法相同。将a(r,θ)代入式(8)得到输出功率为:

上述结果是基于窄带信号假设的,目标辐射信号往往是宽带的,处理宽带信号可以获得较窄带信号更为丰富的目标信息。对于宽带信号处理,可以把接收到的宽带信号在频域上分解成若干窄带信号,然后在每个子带上用窄带波束形成的算法估计目标的方位谱,最后综合所有频段的输出得到宽带估计结果[12-13]。第i个信号的方向矢量为:

子带的MVDR聚焦波束形成权矢量为:

其中,R(fi)=E[X(fi)XH(fi)]为互谱密度矩阵。把式(10)代入式(9)就可以得到第i个子带的波束输出的能量:

把每个子带的能量加权累加就得到了宽带非相干MVDR波束输出:

ηi=1为各子带能量加权,理论上可以根据各频段的信噪比不同进行加权,然而实际中该权系数很难确定,因此式(8)中一般取ηi=1。
4 仿真分析
仿真条件:阵形为阵长40 m,阵元数11元,阵元间距4 m的均匀稀疏线阵,所采用信号处理采样频率为100 kHz,仿真信号为频带2 000~2 500 Hz的高斯噪声信号。
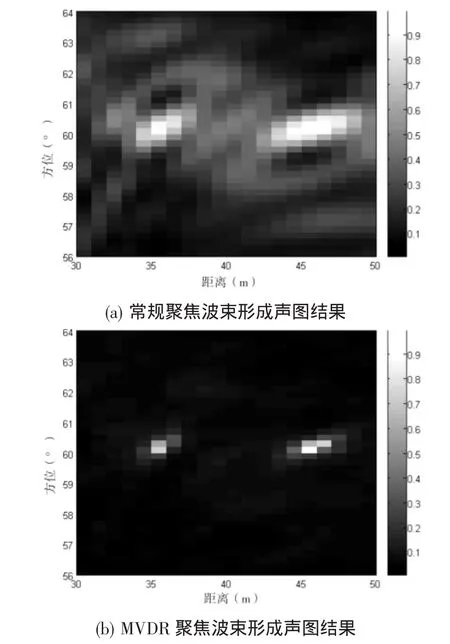
图2 双目标情况下仿真声图结果
仿真为两个位于同方位不同距离的,等强度的相互独立的目标情况下,两种方法给出的声图仿真,目标1位置(60°,35 m),目标2位置(60°,45 m),SNR(信噪比)为5 dB(为每个目标与噪声干扰背景比)。距离扫描步长1 m,方位扫描步长0.2°。仿真结果如图2,图中横坐标为距离,纵坐标为方位。
对于常规波束形成来说由于延时补偿量只与方位有关,因此不具有距离分辨能力,无法进行测距,分辨同方位目标。聚焦波束形成法在近场修正了延时补偿量,引入距离变化对延时影响的补偿,由图2(a)可以看出方法具有距离分辨能力,能够用于对近场目标的定位。其距离分辨力与阵长、信号中心频率及目标距离有关,当阵长和信号特征一定时,方法的距离分辨力受目标距离影响,由图2可以看出目标距离越远分辨能力越差,聚焦峰尺度越大,当目标驶离近场,到达远场时,方法的聚焦峰尺度当无限大,等同于常规波束形成,不再具有距离分辨能力。图2(a)和图2(b)对比可以看出MVDR聚焦波束形成具有较常规聚焦波束形成更低的旁瓣和更好的距离、方位分辨效果。
两种方法分辨能力的比较见图3。接收信噪比10 dB。距离扫描步长1 m,方位扫描步长0.1°。图3中(a),(b)中两目标位于相同距离40 m,是同距离的方位扫描曲线。图3(a)中两目标方位分别为60°和61°,图3(b)两目标方位分别为60.2°和60.8°。图3中(c),(d)两目标方位相同,位于60°,是同方位的距离扫描曲线。图3(c)中距离分别位于40 m和45 m,图3(d)中距离分别位于41 m和44 m,方位60°时的。图3中的两组图实际为声图在距离方向切片和方位方向切片的输出。由图可以看出MVDR聚焦波束扫描的方法分辨力优于常规聚焦波束形成的分辨力且具有更好的主旁瓣比。
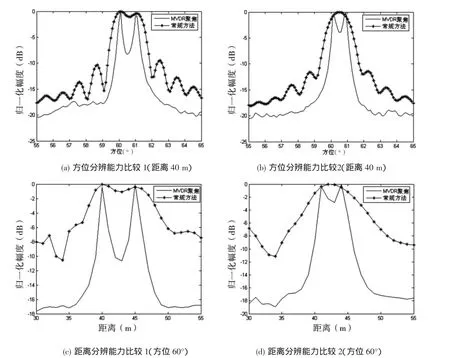
图3 常规聚焦波束形成与MVDR聚焦波束形成分辨能力比较
5 结论
常用的水声定位法有三元阵被动测距方法、目标运动分析(TMA)和匹配场处理(MFP)等[14]。目标运动分析(TMA)和匹配场处理(MFP),立意于提高作用距离和降低检测门限,不关注于近场,近场处理的运算量将非常大。而传统的三元阵法由于采用近似公式等原因对于近场测量精度也并不理想。聚焦波束形成被动定位法适用于近场,可用于固定式辐射声场的测量,舰船各部位辐射噪声源分布测量及辐射源噪声信号估计等方面。由于其分辨能力与阵长、目标距离及信号频率有关,当阵长和目标距离一定时对于低频信号其分辨能力较差,影响定位精度,当存在多个目标时会出现目标混叠现象,无法区分多个目标。针对这一问题采用近场MVDR聚焦波束扫描法。将MVDR波束形成法可降低旁瓣,提高分辨力这一优点应用于聚焦波束形成扫描声图被动定位中。仿真结果分析表明聚焦波束形成扫描声图近场被动定位方法可行,采用近场MVDR聚焦波束形成被动定位法可获得更高的主旁瓣比,提高对目标分辨能力。
[1]惠娟,胡丹,惠俊英,殷敬伟.聚焦波束形成声图测量原理研究[J].声学学报,2007,32(4):356-361.
[2]薛山花,叶青华,黄海宁,黄勇.利用近场MVDR双聚焦波束形成方法实现被动测距[J].应用声学,2005,24(3):177-181.
[3]梅继丹,惠俊英,惠娟.水平阵聚焦波束形成声图定位算法研究[J].哈尔滨工程大学学报,2007,28(7):773-778.
[4]梅继丹,惠俊英,惠娟.聚焦波束形成声图近场被动定位技术仿真研究[J].系统仿真学报,2008,20(5):1328-1333.
[5]Capon J.High-resolution frequency-wavenumber spectrum analysis.Proc IEEE 57,1969,1408-1418.
[6]Kim Byung chui,Lu I-Tai.High resolution broadband beamforming based on the MVDR method[A].Proc M TS/I EEE[C]Oceans,2000,1025-1028.
[7]Lorenz R G,Boyd S P.Robust minimum variance beamforming.In:37thAsilomar Conference on Signals,Systems&Computers,2003(2):1345-1352.
[8]蒋飚,朱埜,孙长瑜.阵列指向性二次形约束稳健波束形成算法[J].声学学报,2006,31(1):91-95.
[9]竺士蒙,宋明凯,宫先仪.一种改善MVDR波束形成性能的方法[J].声学学报,1993,18(1):54-60.
[10]张贤达.通信信号处理[M].北京:国防工业出版社,2000,220-224.
[11]尤立克R J,洪申,译.水声原理[M].哈尔滨:哈尔滨船舶工程学院出版社,1990,41-52.
[12]何心怡,蒋兴舟,李启虎.基于子带分解的宽带波束域最小方差无畸变响应高分辨方位估计方法研究[J].声学学报,2004,29(3):533-538.
[13]杨益新,孙超.任意结构阵列宽带恒定束宽波束形成新方法[J].声学学报,2001,26(1):55-58.
[14]毛卫宁.水下被动定位方法回顾与展望[J].东南大学学报(自然科学版),2001,31(6):129-132.
Abstract:Underwater acoustic image measurement technology can be used in high-precision passive location of near field.It is mainly used to analyze the spatial distribution of naval ship radiated noise sources.The arithmetic of underwater image is focused beam-forming.The resolution of algorithm is concerned with array length,the frequency of signal processing and the range of target.When the array length and measurement range is given,the resolution of low frequency noise sources is poor.MVDR beam-forming algorithm can achieve higher resolution and lower side lobe compared with the conventional algorithm.A method by combination of MVDR and focused beam-forming technology can improve the resolution of naval ship radiated noise sources.
Key words:underwater acoustic positioning;focused beam-forming;underwater acoustic image ranging;MVDR on the near field
Research on the Passive Location of Near Field Using Underwater Acoustic Image with MVDR Focused Beam-forming
WANG Chuan1,MEI Ji-dan2,SUN Lei1,CHANG Zhe3
(1.Naval Institute of Hydrographic Surveying and Charting,Tianjin 300061,China;2.National Laboratory of Underwater Acoustic Technology,Harbin Engineering University,Harbin Heilongjiang 150001,China;3.National Ocean Technology Center,Tianjin 300112,China)
TB566
A
1003-2029(2010)02-0056-04
2010-03-08
