基于浮船坞的航天测量船测量设备标定方法
2010-09-27
(中国卫星海上测控部,江苏 江阴 214431)
1 引 言
航天测量船是我国航天测控网的重要组成部分,综合测控能力强,有效弥补了我国国土面积有限而无法提供全程覆盖的不足[1]。航天测量船采用单站定位体制,对测量设备的误差参数标定提出了很高的要求。
传统干船坞标定是让测量船进船坞坐墩,并在船坞四周建立方位标等设施,以真地平和大地测量
成果为基准,对测量设备进行全面标定[2]。其优点是标定精度高,缺点是周期长、成本高和协调量大[3]。
针对干船坞标定的局限性,文献[4]提出了应用经纬仪与雷达同步测星的动态标定方法,理论求解精度较高,但工程应用重复精度低;文献[5]提出了基于大地测量基准点的雷达零位标校方法,但该方法未考虑船体姿态的影响。
本文提出了一种新的动态标定方法,通过建立误差参数标定的水平和方位基准,采用激光全站仪、高精度水平测量仪等仪器,综合利用船姿测量数据,实现了船载测量设备的高精度动态标定。
2 浮船坞环境及标定特点
“浮船坞”就是建在水上的能够修、造船的平台。浮船坞设有几十个压载水舱,通过调各舱的压载水可以调坞的水平[1]。
受风浪和涨落潮的影响,浮船坞的位置和姿态在不停地变化。由于浮船坞比较大,而长江中波浪的波长较短,振幅也较小,所以对姿态的影响不大[1]。
浮船坞虽然没有剧烈的摇摆运动,但其姿态和位置在不停地变化,所以浮船坞条件下的标定属于动基座标定,与常规干船坞(以下简称干船坞)内的标定相比,有其自己的技术特点:
(1)在干船坞内要求测量船坐墩的置平度满足一定要求,对坞墩的排列要求很高;而浮船坞可以通过调坞的压载水来保证船的置平度,所以要求浮船坞有较强的调水平能力;
(2)干船坞标定时,以测量船艏艉线为测量设备的方位参考基准,以大地水平面为水平参考基准;浮船坞标定时仍以测量船艏艉线为方位参考基准,而以测量船船体基准平台为水平参考基准。
3 方案设计
本方法的标定项目包括船姿测量设备电气零位、雷达方位转盘不水平度、雷达方位角零值和俯仰角零值。
3.1 标定设施
主要标定设施包括:
(1)在浮船坞周围设置若干方位标;
(2)在浮船坞附近设置3个大地测量控制点,其中一个作为主控点(用于放置激光全站仪),另外两个作为副控点,控制点应具有三等大地测量控制网精度。
3.2 船进浮船坞坐墩
船进浮船坞坐墩要求如下:
(1)船进坞前,需在坞底按测量船的底部形状排列坞墩;
(2)在测量船船体基准平台的纵、横向各放置一台水平仪,观测船体纵、横摇值;
(3)船坐墩后,调整浮船坞的压载水,使浮船坞的水平调整到最佳状态,要求纵倾优于30″,横倾优于60″。
3.3 标定时段
标定时应避开潮水换向时段。
3.4 船姿测量设备纵、横摇电气零位标定
要求以船体基准平台为参考基准标定船姿测量设备纵、横摇电气零位,该项目应安排在雷达项目标定前标定。步骤如下:
(1)在船体基准平台的纵、横向各放一台水平仪;
(2)船姿测量设备启动,正常校,并保持最佳工作状态;
(3)同步读取ti时刻船体基准平台水平仪的纵、横摇读数ψ平台i、θ平台i和船姿测量设备纵、横摇读数ψ罗经i、θ罗经i;
(4)按步骤3重复5次以上;
(5)按下式计算船姿测量设备纵、横摇电气零位ψ0、θ0:
ψ0i=ψ罗经i-ψ平台i
(1)
θ0i=θ罗经i-θ平台i
(2)
(3)
(4)
式中,ψ0i、θ0i分别为ti时刻船姿测量设备纵摇零位和横摇零位;ψ0、θ0分别为最终标定的船姿测量设备纵摇零位和横摇零位;i为重复测量次数,i=1,2,3,…,n,n≥5。
3.5 雷达方位转盘不水平度标定
要求以船体基准平台为参考基准标定雷达方位转盘不水平度,步骤如下:
(1)在方位转盘平台上放一台水平仪;
(2)在船体基准平台上放一台水平仪;
(3)雷达方位转盘方位从0°开始,每转30°读取雷达方位编码器读数Ai、雷达方位转盘水平仪读数M雷达i,船体基准平台水平仪在方位上与雷达的方位转盘旋同样角度,并与方位转盘上的水平仪同步读数M基i,直到360°;
(4)利用最小二乘法[6]按下式拟合出雷达方位转盘相对船体基准平台的最大倾斜量βm和最大倾斜量所在的方位角Am:
M雷达i-M基i=M0+βmcos(Ai-Am)
(5)
式中,M0为雷达方位转盘平台水平仪与船体基准平台水平仪初始零位之差。
3.6 雷达角度零值标定
雷达角度零值标定应在船姿测量设备纵、横摇电气零位标定和雷达方位转盘不水平度标定之后进行。方法是用船姿测量设备的输出值作为船的航向、水平基准,大地测量给出方位标相对雷达三轴中心的大地方位角和俯仰角,同时记录雷达标校电视瞄方位标时方位和俯仰编码器读数,综合求解雷达方位、俯仰零值。参加设备有激光全站仪、雷达、船姿测量设备。步骤如下:
(1)在雷达三轴中心上方安装激光全站仪的合作目标和标志灯,标志灯应正确位于方位旋转轴上,并提供激光全站仪合作目标、标志灯与三轴中心的相对位置尺寸;
(2)在大地测量主控点上放置一台激光全站仪,观测主控点到雷达三轴中心的水平角、高低角和距离,利用方位标和控制点的已知大地测量成果,计算雷达三轴中心至方位标的大地方位角A0大地和大地俯仰角E0大地以及斜距R0。要求每1 min或2 min观测一次,利用每次观测数据给出一组计算值:ti、A0大地i、E0大地i、R0i;
(3)船姿测量设备提前开机,使整机处于最佳工作状态。在时统的控制下,录取并打印船姿测量设备输出的姿态测量值ti、Ki、ψi、θi;
(4)雷达用标校电视瞄准方位标,瞄准方位标后方位、俯仰固定,记录方位、俯仰编码器输出值Ai、Ei,每1 min或2 min录取并打印一次时间ti和标校电视脱靶量ΔAi、ΔEi;
(5)按下式对雷达的测量值进行修正后得到A甲i和E甲i:
A甲i=Ai+(ΔAi-Svi)×secEi-
βm×sin(Ai-Am)×tgEi
(6)
E甲i=Ei+ΔEi-Sei-βm×cos(Ai-Am)
(7)
式中,βm为方位转盘最大倾斜量;Am为最大倾斜量所在的方位角;Ai、Ei分别为ti时刻方位编码器输出值和俯仰编码器输出值;ΔAi、ΔEi分别为ti时刻标校电视方位脱靶量和俯仰脱靶量;Svi、Sei分别为由大地测量提供的ti时刻雷达标校电视相对于方位标的方位角改正数和俯仰角改正数;
(6)利用由步骤5得到的A甲i、E甲i,计算ti时刻方位标在以雷达三轴中心为原点的地平坐标系中的坐标分量:
(8)
(9)
其中:
式中,X1i、Y1i、Z1i为ti时刻方位标在以雷达三轴中心为原点的甲板坐标系中的坐标分量,X2i、Y2i、Z2i为ti时刻方位标在以雷达三轴中心为原点的地平坐标系中的坐标分量,R0i为大地测量提供的ti时刻雷达三轴中心至方位标的斜距,Ki、ψi、θi为ti时刻船姿测量设备输出的船体姿态角;
(7)由X2i、Y2i、Z2i按下式计算ti时刻方位标在以雷达三轴中心为原点的地平坐标系中的Ri、A地平i、E地平i:
(10)
E地平i=arcsin(Y2i/Ri)
(11)
(12)
(8)由步骤7得到的A地平i、E地平i与步骤2得到的大地测量结果进行比对,统计雷达的方位角、俯仰角系统误差和随机误差,则系统误差即为雷达的方位零值和俯仰零值,随机误差反映标定精度:
A0i=A地平i-A0大地i
(13)
(14)
(15)
E0i=E地平i-E0大地i
(16)
(17)
(18)
式中,A0i、E0i分别为ti时刻数据计算得到的雷达方位零值和俯仰零值;A0、E0分别为最终标定的雷达方位零值和俯仰零值;A地平i、E地平i分别为ti时刻方位标在以雷达三轴中心为原点的地平坐标系中的方位角和俯仰角;A0大地i、E0大地i分别为ti时刻大地测量获得的方位标至雷达三轴中心的大地方位角和大地俯仰角;σA0、σE0分别为雷达方位角零值标定随机误差和俯仰角零值标定随机误差;n为有效测量数据组数,n=1,2,3,…,n≥30。
4 应用效果分析
某测量船主要测量设备包括测量雷达和用于船舶姿态测量的平台罗经,经过了大规模技术改造后,采用以上设计方案进行了标定试验。
4.1 标定结果
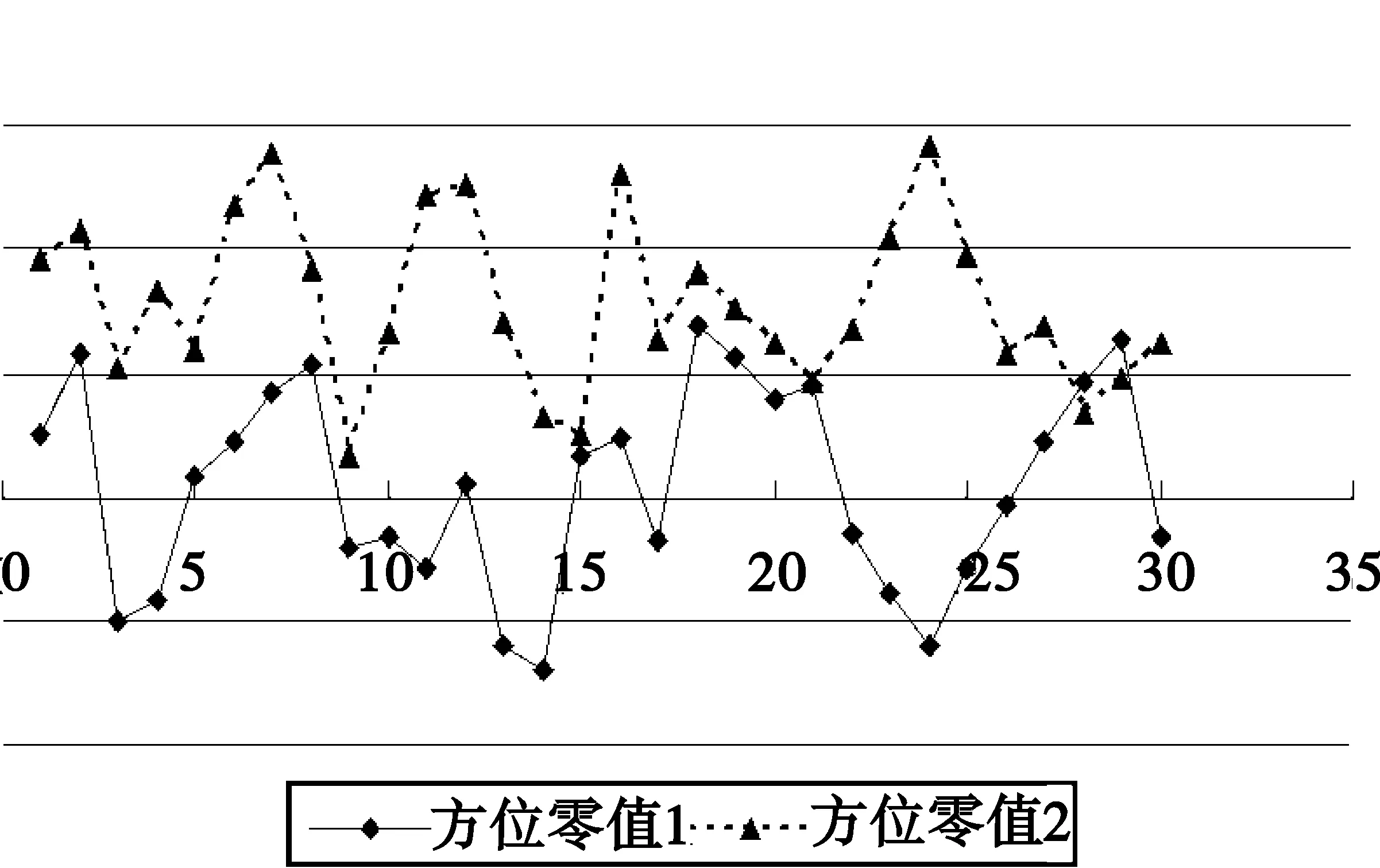
图1 方位零值标定结果Fig.1 The azimuth-zero calibrated

图2 俯仰零值标定结果Fig.2 The elevation-zero calibrated
标定精度主要体现在雷达角度零值的标定中,图1、图2为雷达零值标定结果。图中横坐标为有效测量数据组数,纵坐标为零值标定值。实线和虚线分别表示不同时间段的标定结果。
数据处理表明,标定的方位零值随机误差约为编码器测角误差的3倍,俯仰零值随机误差约为编码器测角误差的2倍,满足航天测量任务对标校精度要求。
4.2 误差分析
与常规干船坞标定相比,该方法随机误差稍大,主要原因包括标校各设备数据录取时间同步误差和船姿测量误差。
5 结 论
本文解决了动态条件下航天测量船测量设备标定技术难题,具有简便、经济、高效等优点,标定精度满足航天测量任务要求,已在工程上得到成功应用。本方法可推广到其它船载测量设备的高精度标定中。
通过建立数据录取同步采样系统,同时提高船姿船位测量精度,可进一步提高本方法的标定精度。
参考文献:
[1] 钟德安.航天测量船测控通信设备标校与校飞技术 [M].北京:国防工业出版社,2009.
ZHONG De-an. Technology of Calibration and Flight Test for TT&C Ship′s Measuring-communicating Equipment[M]. Beijing: National Defense Industry Press, 2009.(in Chinese)
[2] 江文达,陈道桂.航天测量船[M].北京:国防工业出版社,2002.
JIANG Wen-da, CHEN Dao-gui. TT&C Ship[M]. Beijing: National Defense Industry Press, 2002. (in Chinese)
[3] 张同双.航天测量船无线电测量设备方位零位标校新方法[J].电讯技术,2008,48(6):30-34.
ZHANG Tong-shuang. A New Azimuthal Zero Values Calibration Method for TT&C Ship’s Radio Measuring Equipment[J]. Telecommunication Engineering, 2008,48(6):30-34. (in Chinese)
[4] 孙晓昶,皇甫堪.以恒星位置为基准的运动平台上测控雷达精度标校技术[J].宇航学报,2002(3):29-33.
SUN Xiao-chang, HUANGFU Kan. Precision calibration of moving platform based radar with stars as reference marks[J]. Journal of Astronautics, 2002(3): 29-33. (in Chinese)
[5] 李健,张良.基于大地基准点的舰载雷达零位标校方法研究[J].舰船电子工程,2009(1):98-100.
LI Jian,ZHANG Liang. Research on Zero Calibration Method for Shipborne Radar Based on Earth Reference Point[J]. Ship Electronic Engineering, 2009(1):98-100. (in Chinese)
[6] 钟德安.基于标校经纬仪的测量船坞内标校新方法[J].无线电工程,2009(7):49-52.
ZHONG De-an. A New Calibration Method Based on Calibration Theodolite for Spaceraft TT&C Ship at Dock[J]. Radio Engineering, 2009(7): 49-52. (in Chinese)