船载卫通天线角度调整模式存在问题的分析与改进*
2010-09-26
(中国卫星海上测控部,江苏 江阴 214431)
1 引 言
船载卫星通信(简称卫通)站伺服跟踪系统承担着实时跟踪目标卫星的任务,确保岸船间的通信畅通,其地位重要、作用巨大。卫通天线采用方位(Az)、俯仰(El)、交叉(C)三轴稳定、两轴(A、E或E、C)跟踪体制,可以有效解决天线过顶跟踪问题,保证卫星可视区域内无跟踪盲区[1-3]。
船载卫通天线角度调整有随动航向和自适应调整两种工作模式[4]。船载卫通天线自适应调整,是指在自跟踪状态下,以交叉轴角度偏离中心点达到一定角度(一般设为8°)为判断依据,方位轴向对应方向转动相应角度进行补偿,使交叉轴向中心点方向运行的一种工作模式。随动航向是指船载卫通天线方位轴角度随航向变化而相应变化,使航向的变化对天线跟踪不产生影响的一种工作模式。其工作原理是[5]:实时记录航向变化值,对航向变化值进行平滑处理,方位轴实时进行调整补偿,使天线隔离航向对跟踪的影响。在长期使用过程中发现,两种工作模式还存在一定的局限性,容易导致天线达到轴系限位,影响正常通信。为解决该问题,本文对此进行深入分析研究,并提出了改进方案。
2 船载卫通天线转动数学模型
为了便于分析问题,建立卫通天线转动几何模型,如图1所示,XOY为船甲板平面,OZ为垂直甲板平面向上,OH为天线电轴指向。G为H在平面YOZ上的投影,I为H在平面XOY上的投影,J为G在平面XOY上的投影,矩形GHIJ同时垂直于平面YOZ和平面XOY。
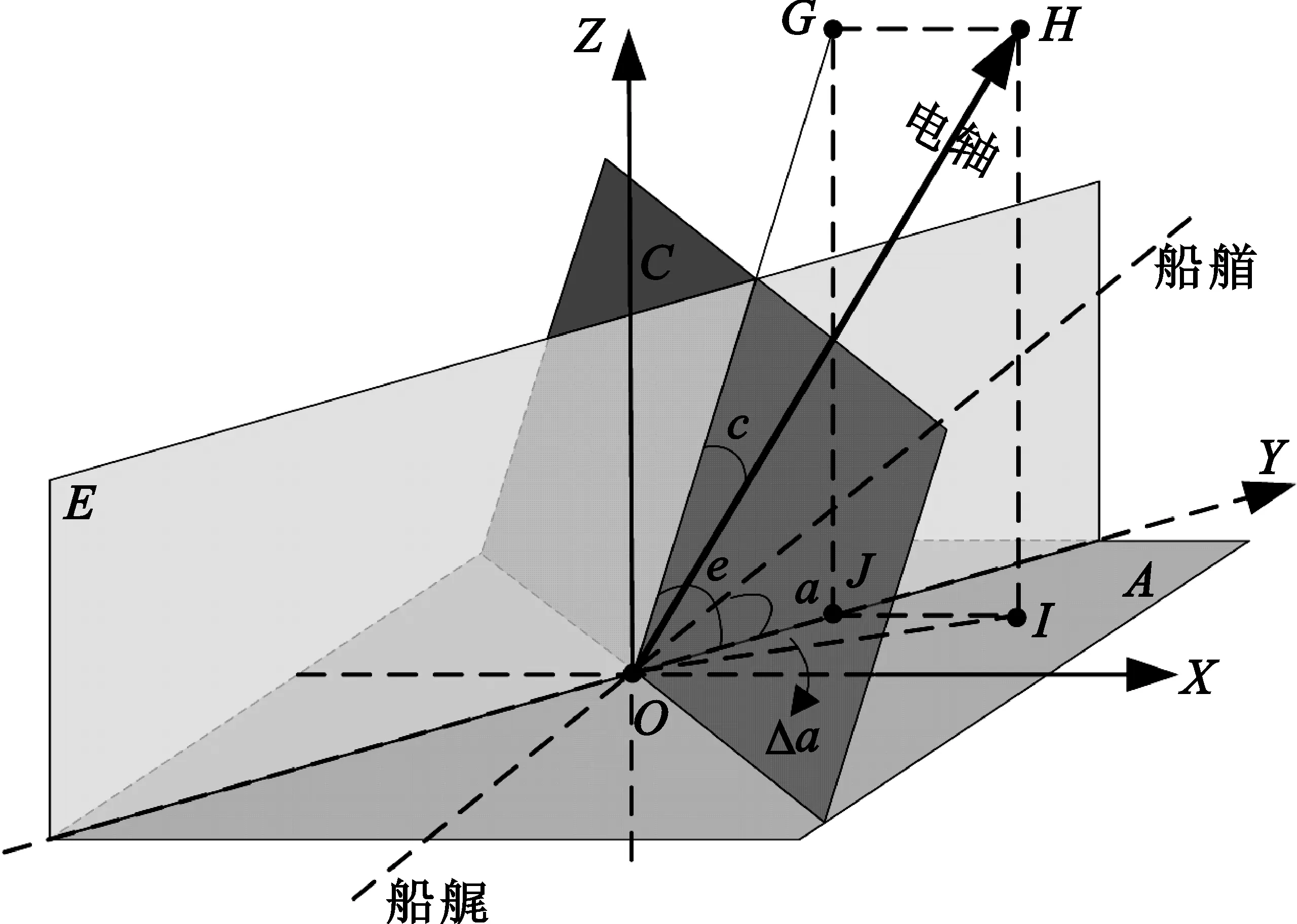
图1 伺服系统三轴跟踪空间示意图
依据几何原理,可以得出:
tanc=tanΔa×cose
(1)
cosc×cose=cosE(实时俯仰大地角)×cosΔa
(2)
3 存在问题分析
环境设置:船航速12 kn,卫通天线跟踪180°E卫星,船位位置在P点(179°E,0°N),卫通工作不少于10 h,则图2中圆形区域为船航行覆盖区。
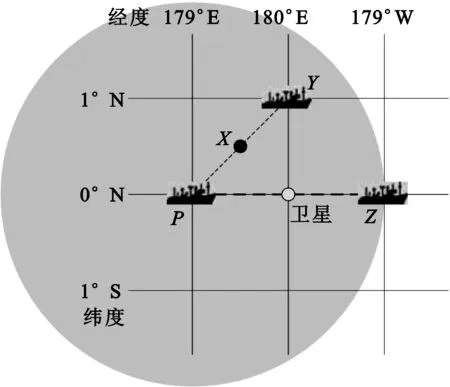
图2 星下点跟踪状态下船航行示意图
假设:船航向45°,卫通天线初始状态A为45°、E为88.82°、C为0°。由于跟踪过程中航向未变,交叉轴也没有达到8°,依据程序原理分析,船航行经X、Y点时,天线方位不会进行调整,天线状态如表1所示。到Y点后,俯仰与交叉在实际跟踪过程中已经互换了角色,即大地俯仰上的变化体现在交叉轴上,大地方位上的变化体现在俯仰上,出现倒置跟踪现象,如果此时船继续往外航行,会出现天线反向跟踪或轴系限位现象,导致天线丢失目标。
另外,船从P点沿着0°纬度直线航线,当船航行至Z点时,如表1所示,天线形成了俯仰反向跟踪状态,如果船继续往前航行,会出现轴系限位现象,导致天线丢失目标。
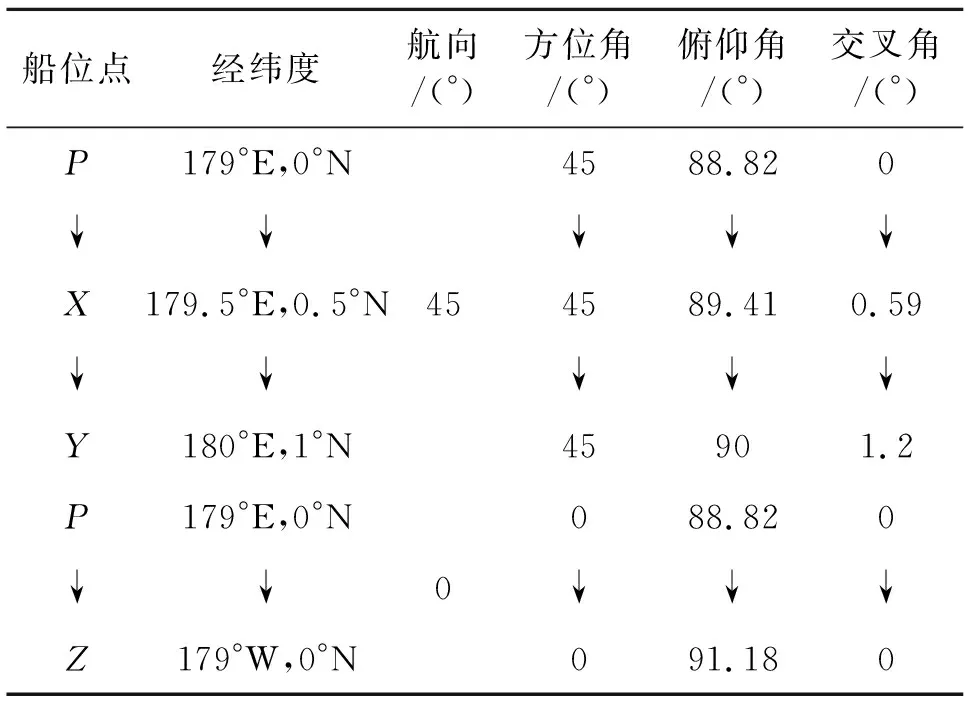
表1 天线状态变化表1
因此,在实际应用中,在通信卫星星下点附近跟踪时,船位变化的影响比较突出,同时天线处于高俯仰角跟踪状态,两种工作模式存在如下缺陷:
(1)自适应调整模式下,交叉轴角度达到预设的8°以后,现有的角度调整方案依据式(1)和式(2)可知:俯仰角度越高,方位轴角度的调整量对交叉轴角度变化量的影响越小,使天线交叉角度长期处于8°附近,此时由于船摇等影响,很容易使天线交叉达到限位;
(2)随动航向模式下,方位轴只隔离了航向因素,地理位置变化的因素没有考虑,若船沿同一航向长时间行驶,交叉轴会朝同一方向运动,最终达到限位;
(3)地理位置比较特殊情况下,容易导致天线姿态变化,即俯仰、交叉倒置跟踪或者俯仰反向跟踪,虽然不影响设备的正常跟踪和通信,但在设备长期运行或状态继续恶化情况下容易导致天线失锁,通信中断。
另外,随动航向模式中,方位轴虽然处于闭环状态,但其调整是高频度的间歇性工作,产生的扰动较大,影响俯仰、交叉轴的跟踪。方位轴频繁的启动、停止,对驱动结构以及卷绕线缆也有较大损害,从而缩短设备使用寿命,因此,船载大型卫通站主要采取自适应跟踪模式。
4 角度调整优化模式研究
4.1 复合模式:自适应调整模式改进
针对两种跟踪模式存在的弊端,本文设计了一种复合调整模式,利用实时理论大地方位角来控制甲板方位角,同时兼顾随动航向模式中方位调整频繁问题。当实时理论大地方位角扣除实时航向值后与甲板方位角差值超过8°时,进行一次自适应调整,这样,该复合调整模式兼顾了自适应调整和随动航向两种跟踪模式的优势,同时避免了两种模式的弊端,使天线方位角度与理论角度的差值控制在8°以内,确保天线保持良好的姿态,实现稳定、可靠跟踪,具体流程如图3所示。

图3 复合调整模式流程图
针对随动航向模式存在的实时调整方位角带来的扰动问题,复合调整模式采取了实际大地方位角度变化量达到8°调整一次的做法,有效降低了方位轴调整次数;针对过顶跟踪问题,依据修改后的程序执行情况,天线状态如表2所示,此时无论船如何航行,都不会导致天线限位(方位硬件限位反转除外),确保了设备跟踪稳定。
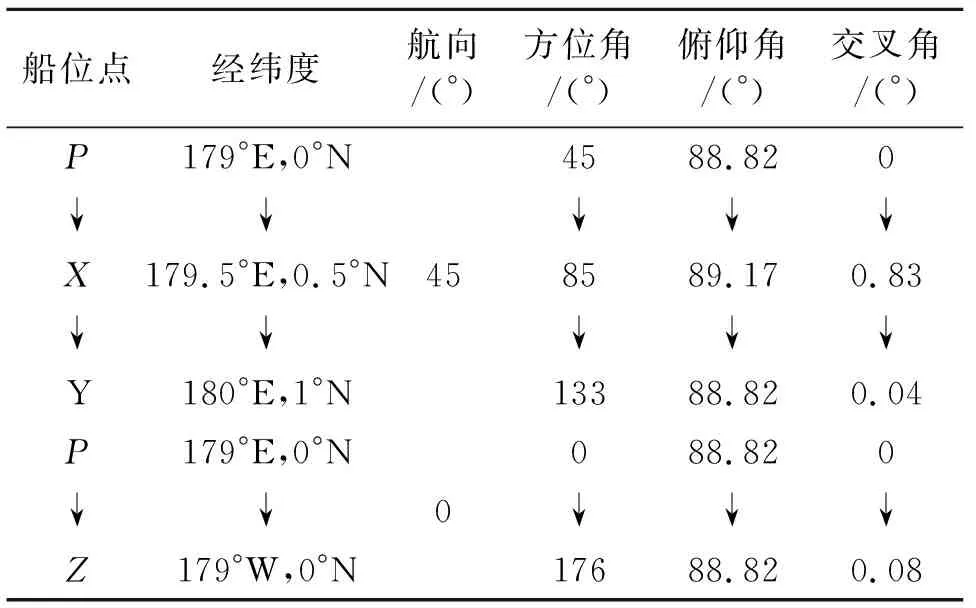
表2 天线状态变化表2
天线低俯仰角情况下,3种模式都能正常跟踪。复合模式设置实际大地方位角度变化量达到8°实现一次调整,是为了确保低俯仰角度下跟踪时将交叉轴角度控制在8°以内。
4.2 复合模式:随动航向模式改进
相对于小型船载卫通站而言,方位轴高频度间歇性调整对天线的影响相对较小,随动航向模式为主用模式,将随动航向控制改为随动大地方位角度控制,如图4所示,即可解决航向模式存在的实时调整方位角带来的扰动问题。
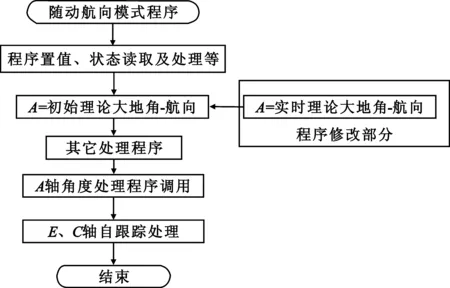
图4 随动航向跟踪模式流程图
4.3 后续分析
对于天线反向跟踪或倒置跟踪时,是否会丢失目标的问题,分析如下:正常状态下,当天线往下偏离目标时,如图5(a)所示,俯仰误差电压为正,促使天线向上运行,达到跟踪目标的目的;当天线俯仰反向跟踪,处于图5(b)状态时,俯仰角度与正常角度增加,但相对于天线面来说,目标在天线的下方,俯仰误差电压为负,促使天线向下运行,天线仍能正常跟踪目标;当天线处于倒置跟踪时,同理,出正或负的交叉误差电压,仍能正常跟踪。所以,无论天线处于何种状态,只要极化角、接收机相位正确,均能正常跟踪。唯一例外的是,当跟踪线极化卫星,在过顶跟踪的瞬间,需要大范围调整极化角度,此时,天线将会丢失目标,如果能够协调交叉耦合相位调整、极化角度调整按相应方向同时、同速率调整,就能解决该问题。另外,关于在同一位置天线处于不同状态(倒置、俯仰反向)跟踪时信号的极化是否会影响跟踪问题,通过理论推导和实际使用,确认为不影响跟踪,这里不再阐述。
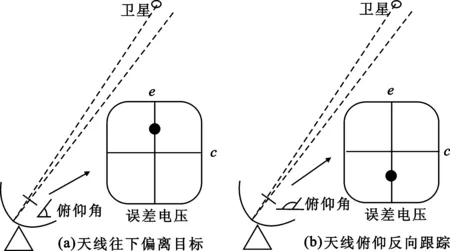
图5 天线跟踪原理图
复合调整模式在自适应跟踪模式下增加了实时理论计算及两个判断程序,对程序运行本身不增加变量,并且软件运行所需资源也较少,不会引起程序其它方面的问题,非常适合于船载卫通站使用。
5 结束语
本文对船载卫通站自跟踪模式进行了分析,建立了卫通天线转动数学模型,通过理论分析并结合船载卫星通信的实际使用情况,指出了现有跟踪模式存在的问题,提出了以实时理论大地角为基础的复合调整模式方案,消除高俯仰角状态对跟踪的影响,在某型号船载卫通站上实现了改进使用,天线跟踪更加稳定、可靠。
参考文献:
[1] 中国人民解放军总装备部军事训练教材编辑工作委员会.卫星通信技术[M].北京:国防工业出版社,2000.
Committee for Editing Military Training Book of PLA. Technology of Satallite Communication[M].Beijing:National Defense Industry Press,2000.(in Chinese)
[2] 蒋力.目标过顶的程序跟踪控制技术[J].现代电子技术,2005,28(9):1-4.
JIANG Li. Control Technology for Program Tracking during Zenith Pass[J]. Modern Electronics Technique,2005,28(9):1-4.(in Chinese)
[3] 李培,韩恩典.船载天伺馈系统速度环路的PID控制调整[J].无线电工程,2010,40(4):38-42.
LI Pei, HAN En-dian. PID Controller Adjustment of Velocity Loop in ship-Borne Antenna Servo and Feed System[J]. Radio Engineering,2010,40(4):38-42.(in Chinese)
[4] 瞿元新.航天测量船海上测控技术概论[M].北京:国防工业出版社,2009.
QU Yuan-xin. A panorama of measuring and control technique an sea in aerospace measuring ship[M].Beijing:National Defense Industry Press,2009.(in Chinese)
[5] 简仕龙.航天测量船测控通信设备船摇稳定技术[M].北京:国防工业出版社,2009.
JIAN Shi-long. Technique of stabling ship swaying for measuring control and communication equipment in aerospace measuring ship[M].Beijing:National Defense Industry Press,2009.(in Chinese)