高准确度数字式时频域实时频率测量系统*
2010-09-26
(中国科学院 微电子研究所,北京 100029)
1 引 言
频率测量系统在通信、导航、空间科学、计量技术等众多领域中有广泛的应用,一直是学术界的研究热点。随着电子技术的发展,对频率测量准确度和测量实时性的要求也越来越高。而国内现有测频系统难以同时满足高准确度和实时性的要求,特别是在众多待测信号为信噪比较低的微弱信号的实际应用中。
频率测量可以在时域或频域进行,现有的频率测量方法中一般为单独在时域或单独在频域进行测量。时域频率测量方法是现有研究中应用较多的,其本质上等同于时间间隔测量[1],主要有直接测频法、多周期同步测频法和模拟内插法等。直接测频法实现简单,但存在±1计数误差,测量准确度较低[2-3]。多周期同步测频法测量周期与被测信号同步,可以消除被测信号的±1计数误差,但仍存在基准信号的±1计数误差,测量准确度仍然难以大幅提高[3-4]。模拟内插法通过模拟电路来扩展窄脉冲,可以达到较高的准确度,但是其硬件电路结构极为复杂,线性度要求极高,实现难度很大[5]。现有时域测频方法提高测量准确度只能牺牲系统的实时性,依靠增加测量时间来实现,因此高准确度仅适用于强信号,实际应用中带有噪声和干扰的微弱信号难以精确测量。频域测量方法一般通过快速傅里叶变换(FFT)在频域上进行[6],可以适用于实际应用中信噪比较低的弱信号,但是其测频准确度一般不高,测量时间也较长,实时性较差。
提高时域方法测频准确度的本质是插值,但是现有时域测频系统基本是模拟式的,通过硬件实现插值成本较高且性能受限,而数字方法进行插值则很容易[7-8]。频域测频系统则要求系统必须为数字式。
本文在现有时域方法和频域方法的基础上,基于数字式接收机能够兼顾方便实现时域插值和同步实现频域测量的优点,提出了一种新的数字式时频域频率测量系统。系统利用频域方法得到信号的粗略频率,根据频率粗测值构造跟踪滤波器对原波形进行滤波,然后在时域进行软件插值,即可得到信号的精确频率。本文通过数值仿真和实验室测试,证明该方法在低信噪比状态下的测量准确度很高,实时性很好。
2 数字式频率测量系统
2.1 系统评价参量
频率测量系统中,评价性能的主要指标为测量时间和测量频率准确度,其中测量时间包括信号累积时间和信号处理时间两部分。本系统中信号处理与信号累积两者并行处理,在处理器运算能力足够的情况下,测量时间仅取决于信号累积的时间,即测量时间仅为ADC累积采样数据的时间。本文使用测量频率f与实际频率f0的差值作为准确度衡量指标,具体分为绝对准确度P和相对准确度P′:
P=f-f0
(1)
P′=(f-f0)/f0
(2)

(3)
(4)
本文中所采用的测频准确度的表示参量为相对
2.2 系统架构
数字式频率测量系统的硬件结构如图1所示,虚线框内信号源部分为待测的频率源,它可以看作是正弦波和噪声的叠加。其输出经过放大、滤波等处理后通过ADC量化为数字信号,送入DSP进行处理。信号处理在频域和时域进行。
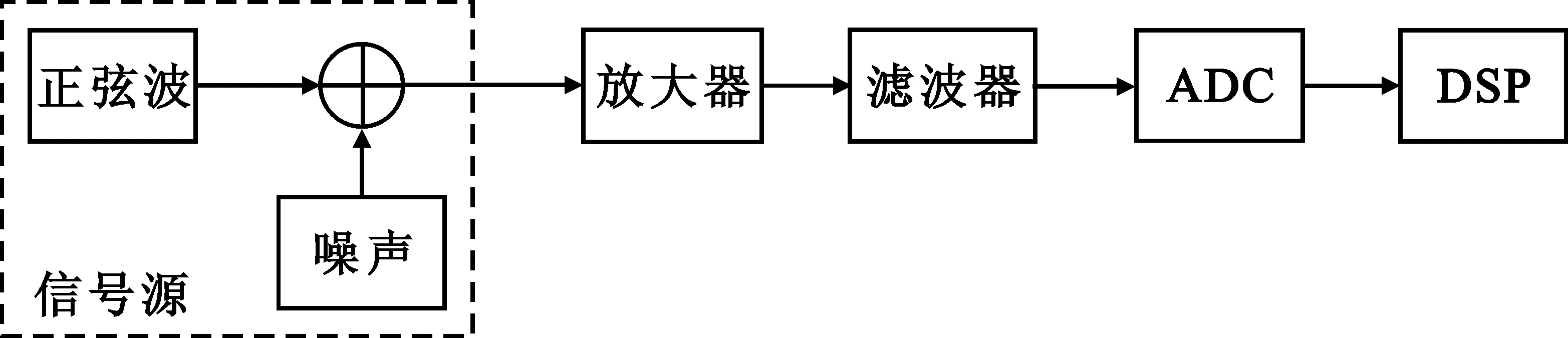
图1 频率测量系统硬件结构
系统的信号处理算法流程如图2所示。ADC后数字滤波器的作用是滤除直流分量和信号通带外的低频和高频分量,降低其对测量准确度的影响。数字滤波器后为频率测量部分,按功能主要分为频域粗略测频和时域频率精测两部分。

图2 频率测量系统算法流程
频域粗略测频采用离散傅里叶变换(DFT)的快速算法(FFT)来实现,采集一段较短长度的数据后进行FFT运算,即可把信号的时域波形变换为频域的频谱,信号频谱中的峰值即为FFT的频率测量值。而FFT所得到的频谱为离散值,当待测信号频率不是采样频率的整数倍时频谱的峰值与待测信号频率的真实值之间会存在一定的误差,因此本文中FFT频率测量值只是作为粗测值使用。FFT粗测值的作用是设置系统自适应滤波器的中心频率。
自适应滤波器为一个窄带的带通滤波器,当中心频率确定后,即可实现时域的跟踪滤波,进一步滤除带外的噪声,为后续的时域测频算法提供更高的信噪比。
系统中进一步提高测频准确度的核心算法是时域计数算法。计数算法中常用的为均值计数算法,而现有的模拟式系统的准确度大体相当于未插值的均值计数算法。假设待测信号的过零点坐标为x1,x2,x3,…,xn,则均值计数算法得到的半波长周期为

(5)
分析式(5)可以发现,均值算法仅使用了第一个和最后一个过零点,中间的数据被浪费了。
本文提出最小均方误差计数测频算法(简称LMS算法)可以克服均值计数算法这一缺点。算法实现过程如下:
设频率信号测量得到的过零点分别为x1,x2,x3,…,xn,它构成矢量x=[x1x2x3…xn]T。为简单起见,不考虑噪声和加速度,则被测频率信号的过零点具有如下线性形式:
x=bt+c
(6)
式中,t为时间,数字系统中取离散形式t=[1 2 3 …n]T;b代表半周期;c代表初始值。
令矩阵:
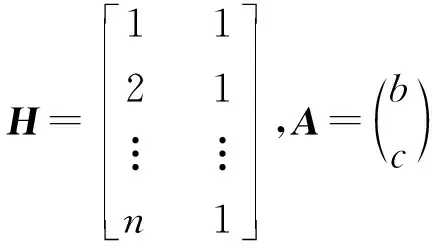
(7)
则测量值x可表示为
x=HA+N
(8)
式中,N代表噪声向量。
使用最小均方差方法,系数矩阵A由下式给出:
A=(HTH)-1HTx
(9)
式中,矩阵A的系数b即为满足最小均方误差的半波长周期。据此,可得出信号频率值为
f=1/2b
(10)
3 测试平台搭建
为了测试第2节中提出的新式时频域数字式测频系统的性能,搭建了相应的测试平台。
图3给出了测试平台的结构,其中信号源采用Tektronix AFG3022B任意波形发生器,它具有50 Ω输出阻抗和最高25 MHz的输出频率。衰减器用于产生足够的噪声,模拟系统低信噪比状态。ADC采用NI PXI-5922,其内部具有采样率0.4倍带宽的低通滤波器,最高24位的动态分辨率和最高16 MSPS的采样率,本实验工作于2 MSPS的采样率。信号源和ADC的时钟均同步于铷原子钟,作为频率基准的铷原子钟具有±5×10-11的频率准确度。ADC采样数据送入PC,由运行于其上的Matlab算法实现频率解算。
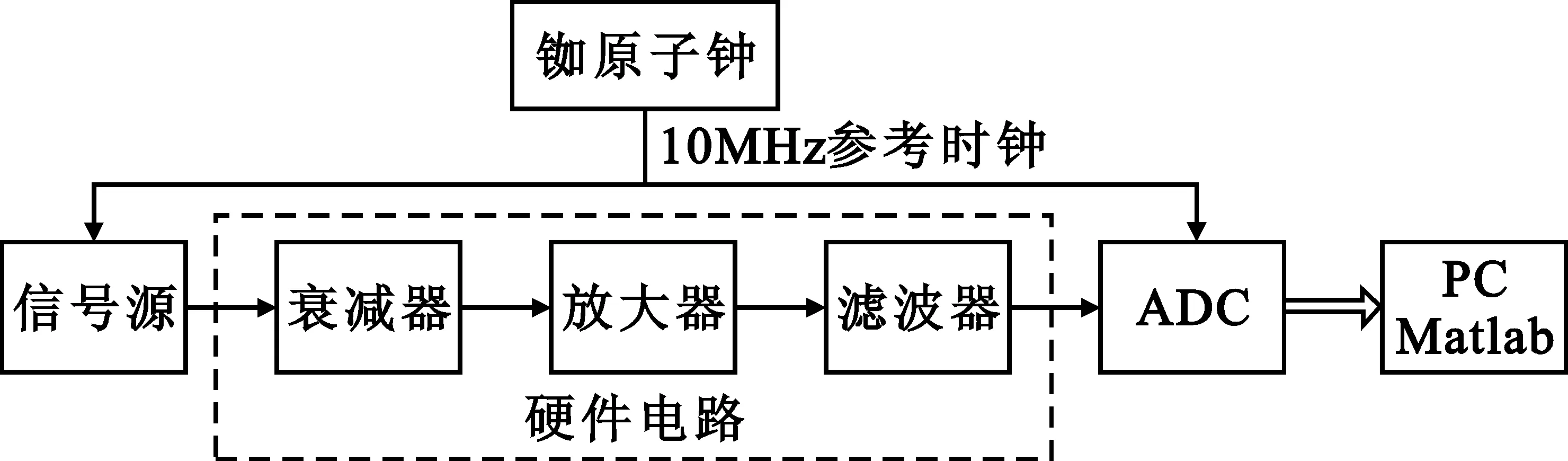
图3 测试平台结构
较高信噪比状态下的数据由信号源的输出直接输入ADC得到。图4中的硬件电路用于模拟较低信噪比状态下的系统。该电路3 dB带宽约为1 MHz,衰减器采用π型电阻衰减网络实现,增益为-46 dB,放大和滤波均采用运算放大器实现。放大器采用3级相同的结构级联,每级实现20 dB增益,同时实现一阶低通滤波。滤波器采用Sallen-Key型低通,其增益为6 dB,Q值为1,实现二阶低通滤波。

图4 硬件电路示意图
由于准确度与频率的绝对数值无关,仅与其比例有关,本文使用归一化频率(fnom),即测量所得的频率值除以ADC采样频率的一半。
4 测试结果
4.1 准确度与测量时长和信噪比的关系
fnom=0.5时,相对均方根准确度随测量时长和信噪比(SNR)变化的测试结果见图5。测量时长的等效参量为ADC采样点数目,分别为512点、1 024点和2 048点;仿真使用的噪声为高斯白噪声。图中连线代表仿真结果,而分立点代表测试结果。仿真结果在信噪比10 dB处的转折是因自适应滤波器开启或关闭造成的。

图5 相对准确度与测量时长和信噪比的关系
仿真结果表明,测量时长每增加1倍或信噪比每提升10 dB,准确度提升为原准确度的约3倍。
在测量时间为1 024个采样点、归一化频率为0.5条件下,信噪比10 dB情况下相对均方根准确度优于3×10-5,信噪比0 dB下相对均方根准确度优于1×10-4。
图5中实验结果要优于仿真结果,实验结果最差值与仿真结果基本相当,相同条件下,信噪比10 dB下准确度测量结果为1.2×10-5,0 dB下为7.7×10-5。主要原因:一是仿真使用的噪声类型为白噪声,而实际电路的噪声接近1/f噪声,噪声能量集中在低频端,且硬件中存在0.8倍带宽的低通滤波;二是仿真没有考虑信号的谐波分量,而谐波分量使得信号的测量信噪比偏低,但它不会对准确度造成太大的影响,从而造成相同信噪比状态下准确度有偏向更高端的趋势。
4.2 准确度与被测频率的关系

图6 相对准确度与被测频率的关系
测量时长为1 024点ADC采样时间时,相对均方根准确度随被测频率变化的测量结果如图6所示,其中连线代表仿真结果,分立点代表测试结果,测试结果同样优于仿真结果,原因与4.1小节中一致。分析图6可以发现,相对准确度与信号频率大体为倒数关系,即绝对准确度基本不随信号频率变化。
在较高信噪比、测量时间5 ms情况下,本文算法的相对均方根准确度为1.2×10-9;测量时间为50 ms情况下,准确度达到了7.1×10-11。在低信噪比状态下,本文算法仍然保持了较好的准确度,0.5 ms测量时间下,信噪比0 dB时准确度约为7.7×10-5,10 dB时约为1.2×10-5。
5 结 论
本文设计并实现了一种新的时域和频域相结合的数字式频率测量系统,该系统可在微弱信号下工作,具备高测量速度和高测频准确度。搭建了测试平台对系统性能进行了测试,测试结果表明最小均方差方法非常适合该领域,系统的测频准确度较现有系统有大幅度的提高。
参考文献:
[1] 孙杰,潘继飞.高准确度时间间隔测量方法综述[J]. 计算机测量与控制, 2007,15(2): 145-148.
SUN Jie ,PAN Ji-fei.Methods of High Precision Time-Interval Measurement[J]. Computer Measurement and Controls,2007,15(2): 145-148.(in Chinese)
[2] 柳义利,刘海霞, 高速连续频率测量[J]. 电子测量技术, 1999(2): 19-21.
LIU Yi-li, LIU Hai-xia. A New Method of High Speed and Continuous Measurement of Frequency[J]. Electronic Measurement Technology, 1999(2): 19-21. (in Chinese)
[3] 柳义利,周渭, 一种高速连续频率测量方法[J]. 宇航计测技术, 2000,20(1): 32-38.
LIU Yi-li, ZHOU Wei. A new method of high speed and continuous measurement of frequency[J]. Journal of Astronaueic Metrology and Measurement, 2000,20(1): 32-38. (in Chinese)
[4] 马献果,焦阳. 频率测量方法的改进[J]. 仪器仪表学报, 2004,25(z1): 120-121.
MA Xian-guo,JIAO Yang.Improvement on Traditional Frequency Measurement Methods[J]. Chinese Journal of Scientific Instrument, 2004,25(z1):120-121. (in Chinese)
[5] 潘继飞,姜秋喜,毕大平.模拟内插法及其测量误差分析[J]. 电光与控制, 2007,14(1):147-150.
PAN Ji-fei,JIANG Qiu-xi,BI Da-ping.Analog Interpolation method and it′s measurement error Analysis[J].Electronics Optics and Control,2007,14(1):147-150.(in Chinese)
[6] 磨少清,李啸骢.一种高准确度的改进傅里叶测频算法[J]. 电力系统自动化, 2003,27(12):48-49.
MO Shao-qing,LI Xiao-cong.An improved high accuracy FFT frequency-measurement algrorithm[J].Automation of Electronic Power Systems,2003,27(12):48-49.(in Chinese)
[7] 闻军会,赵国庆.数字测频算法研究[J]. 雷达与对抗, 2002(4):24-29.
WEN Jun-hui, ZHAO Guo-qing.Study of Digital Frequency Measurement Algorithms[J]. Radar & Ecm, 2002(4): 24-29. (in Chinese)
[8] 江玉洁, 陈辰, 周渭.新型频率测量方法的研究[J]. 仪器仪表学报, 2004,25(1):30-33.
JIANG Yu-jie,CHEN Chen,ZHOU Wei.A Study of New Methods about Frequency Measurement[J].Chinese Journal of Scientific Instrument,2004,25(1):30-33.(in Chinese)
