基于RWC的斜视机载SAR CS算法仿真*
2010-09-26刘明园1徐松涛1凯1何建军
刘明园1,,徐松涛1,刘 凯1,何建军
(1.空军工程大学 工程学院,西安 710038;2.解放军69018部队,新疆 喀什 844200)
1 引 言
作为一种主动式微波传感器, 合成孔径雷达(Synthetic Aperture Radar,SAR)具有不受光照和气候条件等限制实现全天时、全天候对地观测的特点,甚至可以透过地表或植被获取其掩盖的信息。SAR在距离向发射宽带信号,在方位向采用合成孔径技术,使得它具有较高的分辨率[1-2],这些特点使其在民用领域和军事领域均具有独特的优势。民用机载SAR通常工作在正侧视模式下,但是在军事应用中,经常要对航迹向场景进行侦察,或者对后向散射系数依赖于观测角的特殊目标进行斜视成像,因此很有必要对斜视的成像展开研究[1-2]。
国内近年来主要从提高斜距模型近似精度和距离徙动校正精度两方面开展了大斜视角成像研究。文献[3]通过使用三次项来提高近似精度,文献[4]在回波处理过程中增加了二维的傅里叶变换来提高精度,文献[5]使用非线性的改进算法提高成像精度,本文通过建立条带式SAR工作模型,针对经典线调频变标(Chirp Scaling,CS)算法讨论了距离徙动校正(Range Walk Correction,RWC)对成像的影响,使用了RWC对CS算法进行改进,通过实验仿真了斜视情况下回波成像效果,结果表明改进后的算法成像质量较经典CS算法有明显的改善。
2 成像及距离徙动
2.1 SAR成像过程
SAR成像的基本思路是:将二维处理分解为两个一维处理,简化处理过程并降低运算量。但由于SAR系统的特点,回波信号的距离向和方位向之间存在耦合,不能简单地分开来。而这种耦合是由于回波信号中存在距离徙动现象引起的,只要消除了距离徙动,就可以将二维处理过程分解成距离向和方位向两个一维处理过程的级联[6]。
2.2 距离徙动
2.2.1距离徙动分析
对斜视时的距离徙动进行分析,如图1所示,θ0是波束射线指向的斜视角,A是合成孔径的中心,由图1可知:X0=RBtanθ0,R0=RBsecθ0。

图1 斜视距离徙动示意图
以天线波束中心线指向目标时雷达的位置(X=X0)为基准,知道载机沿航线飞行位于某一坐标X时(即图中的A点)的瞬时斜距R为
(1)
由于有效的合成孔径距离L远小于R0,在X=X0处泰勒展开,省略(X-X0)的三次项以上的高次项,有:
(2)
即:
(3)
由于SAR载机与目标之间的相对运动,对地面某一静止点来说,它与雷达载机之间的距离是不断变化的,主要分为距离徙动和距离弯曲。公式(3)表明:在合成阵列某处(X)到目标的距离与阵列中心A(X=X0)到该目标的距离差由(X-X0)的一次项和二次项组成,通常称一次项为距离徙动,二次项为距离弯曲。随着斜视角的增大距离徙动也随之增大,这样对其进行校正的难度也就增大了,无疑对成像效果产生较大的影响。
距离徙动与多普勒中心频率成正比,是多普勒中心频率fdc的函数,是严格的时域线性量,因此可以在时域直接校正。实际处理中将多普勒中心频率和距离徙动结合起来,进行如图2所示的迭代,用以提高对fdc的估计精度,并完成距离徙动的校正。距离弯曲很小,仍会影响成像质量,对其的校正通常是在频域利用直线对点目标的方位频谱区先进行分段以后拟合,然后将这些拟合的直线搬移到一条直线上,即可以得到一个近似的结果,而且运算量小,易于实现[7]。
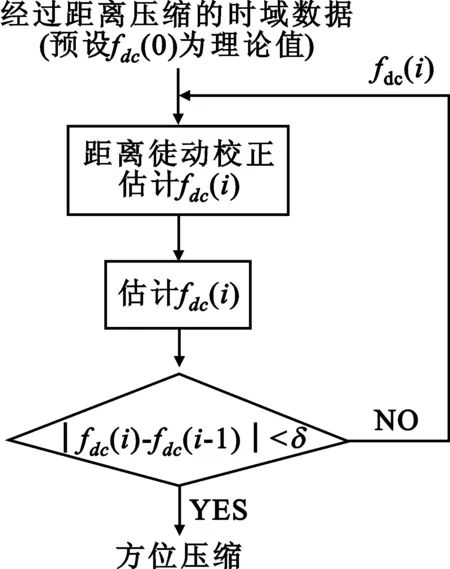
图2 距离徙动校正流程图
2.2.2成像模型分析

图3 条带式机载SAR工作模型
假设飞机运行模式为条带式,其运行的几何模型如图3所示:载机飞行速度为v,载机的斜视角为φ,距地面垂直高度为h,地面目标位置为P,t=0时刻载机与目标之间的距离为R,t时刻时距离为r(t)[8]。
斜视的等效距离方程可表示为
(4)
对式(4)进行泰勒展开并取前3项,得到:
(5)
由此可知,距离徙动的表达式为
(6)
式中,线性项为距离徙动量,二次项为距离弯曲量。
如图4所示,载机速度为100 m/s的情况下距离徙动量和斜视角度的关系符合线性关系,故可以在时域对其进行校正。
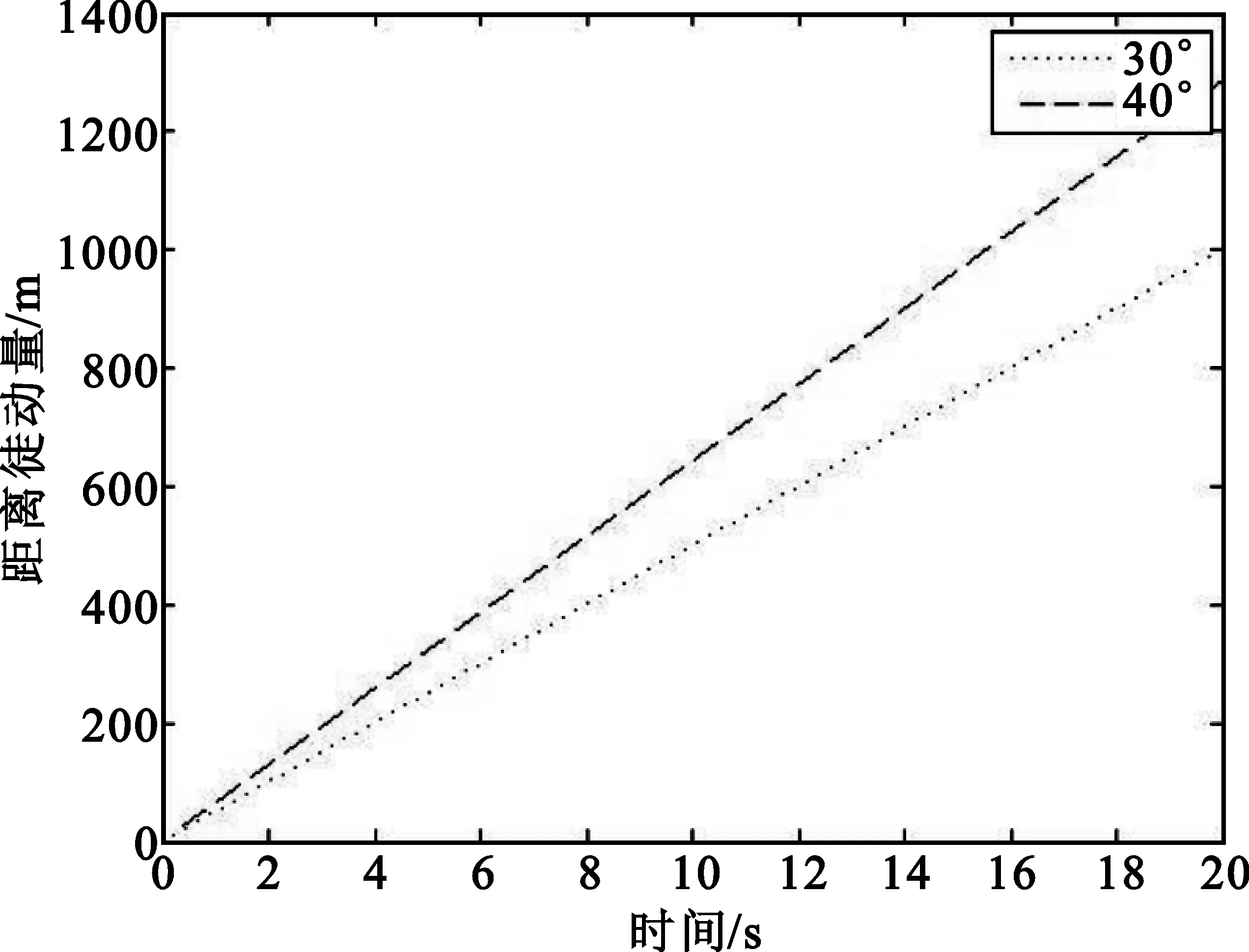
图4 不同角度的距离徙动量
时域校正后的斜距为
rp(t;R)=r(t;R)+rw(t;R)
(7)
校正的距离徙动量为
(8)
3 改进的斜视成像算法分析
CS算法是一种高精度的成像算法,它利用一个相位因子(也叫CS因子)改变了距离徙动的空间移变特性,使距离徙动校正避免了插值运算,同时还能保持图像的相位精度,具有很好的成像效果。
本文对经典的CS算法进行改进,在方位向傅里叶变换之前进行距离徙动校正,如图5所示。

图5 距离徙动校正的CS算法流程图
按照改进后的算法,对斜视情况的CS算法按照改进后的步骤推导如下[9-10]:
(1)假设雷达发射线性调频信号(忽略信号幅度),则SAR的点目标回波信号可表示为
(9)
式中,τ和t分别是距离时间和方位时间,c为光速,k为发射线性调频信号的调频率,r(t;R)为点目标到雷达的斜距变化。
(2)首先对回波信号进行距离徙动校正,距离徙动校正量如前式rp,则校正后的回波表达式为

(10)
其中:
(11)
(3)对回波信号的方位向进行傅里叶变换,将信号转换到距离多普勒域,得到:

(12)
式中,fa为方位向的频率,
(13)
(14)
(4)对处理后的回波信号,在距离多普勒域乘以CS因子:
H1(τ,fa)=exp{-jπKm(fa,Rref)·
Cs(fa)[τ-τref(fa)]2}
(15)
其中:
(16)
(17)
经过CS处理之后,不同距离回波信号的距离徙动曲线与参考距离上的距离徙动曲线有相同的形式。
(5)对CS处理之后的信号进行距离向的傅里叶变换,变换后信号的频域表达式如下:

(18)
其中:
(19)
式中,fr为距离向的频率。式中第一项为fr的线性项,对应目标的正确位置R和徙动RrefCs(fa);第二项为fr的二次项,为距离调频信号经过傅里叶变换的结果,对应距离压缩和SRC;后面的项与距离频率fr无关,对应方位向聚焦和相位补偿。
(6)在二维频域SS3(fr,fa;R)乘以距离补偿因子H2(fr,fa),就实现了距离压缩处理和距离徙动校正。

(20)
式中,第一项完成距离向压缩,第二项完成距离徙动校正。

(21)
(7)对信号在距离向进行傅里叶反变换,信号变回到距离多普勒域。

(22)
(8)对信号沿方位向乘以方位补偿因子。
对变换到距离多普勒域的回波信号沿方位向乘以方位补偿因子H3(τ,fa),如下式,式中第一项完成方位压缩,第二、三项完成残留相位补偿。

(23)
(24)
(9)对信号在方位向做傅里叶反变换,完成方位向处理。
(25)
4 改进的CS算法成像仿真
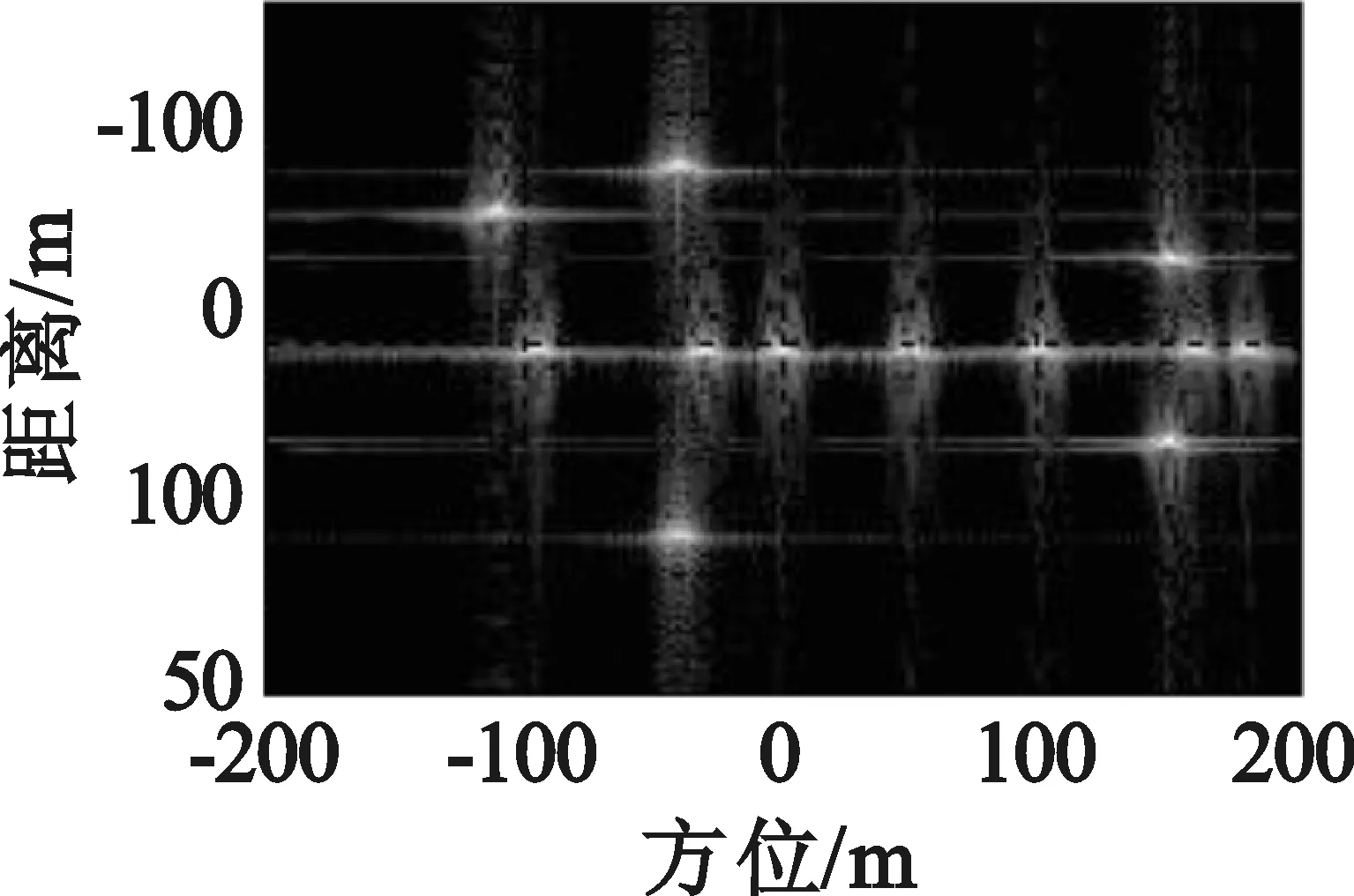
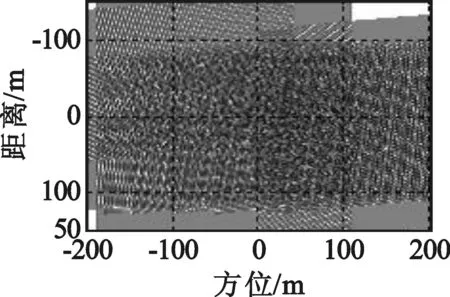
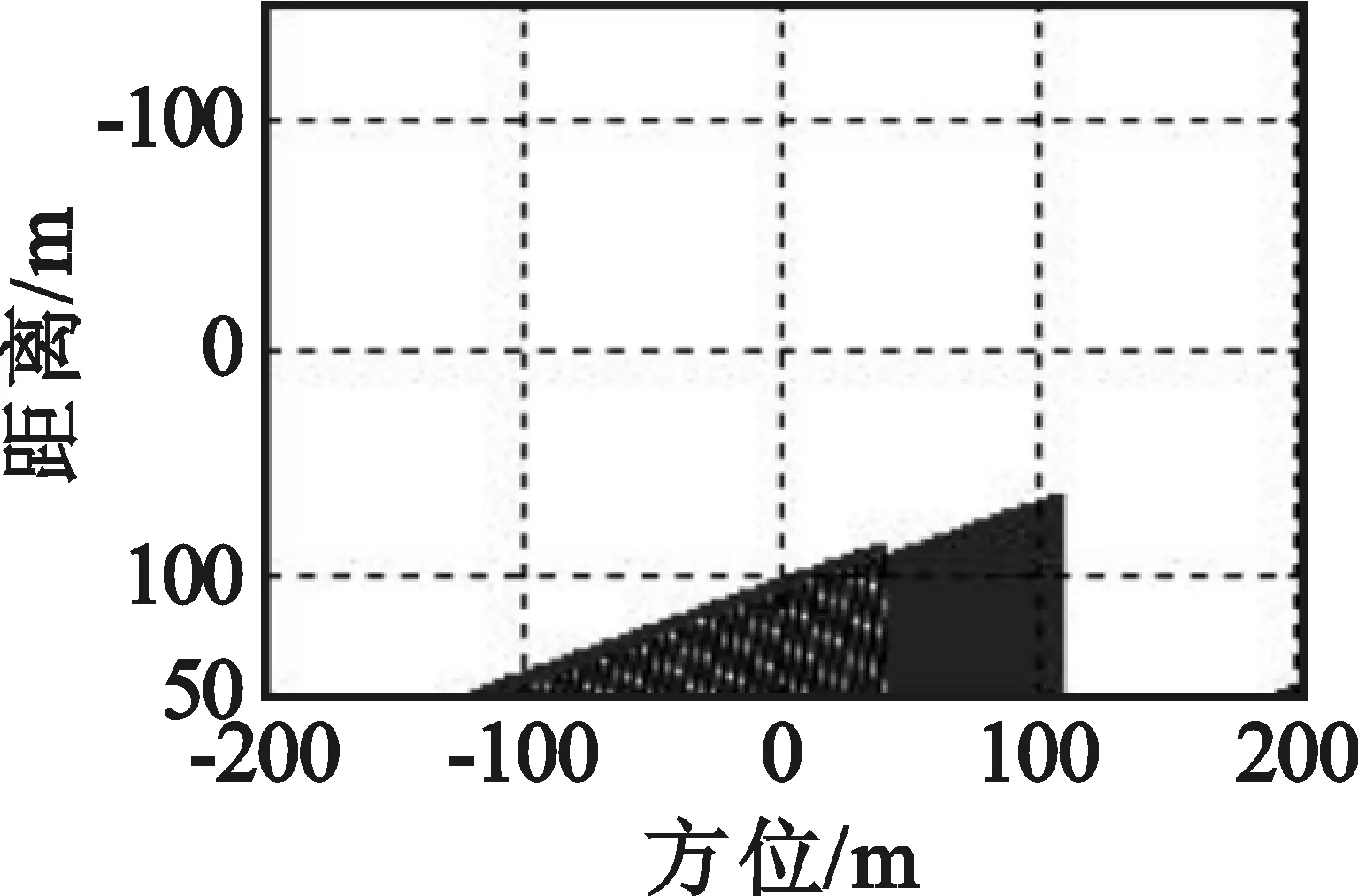
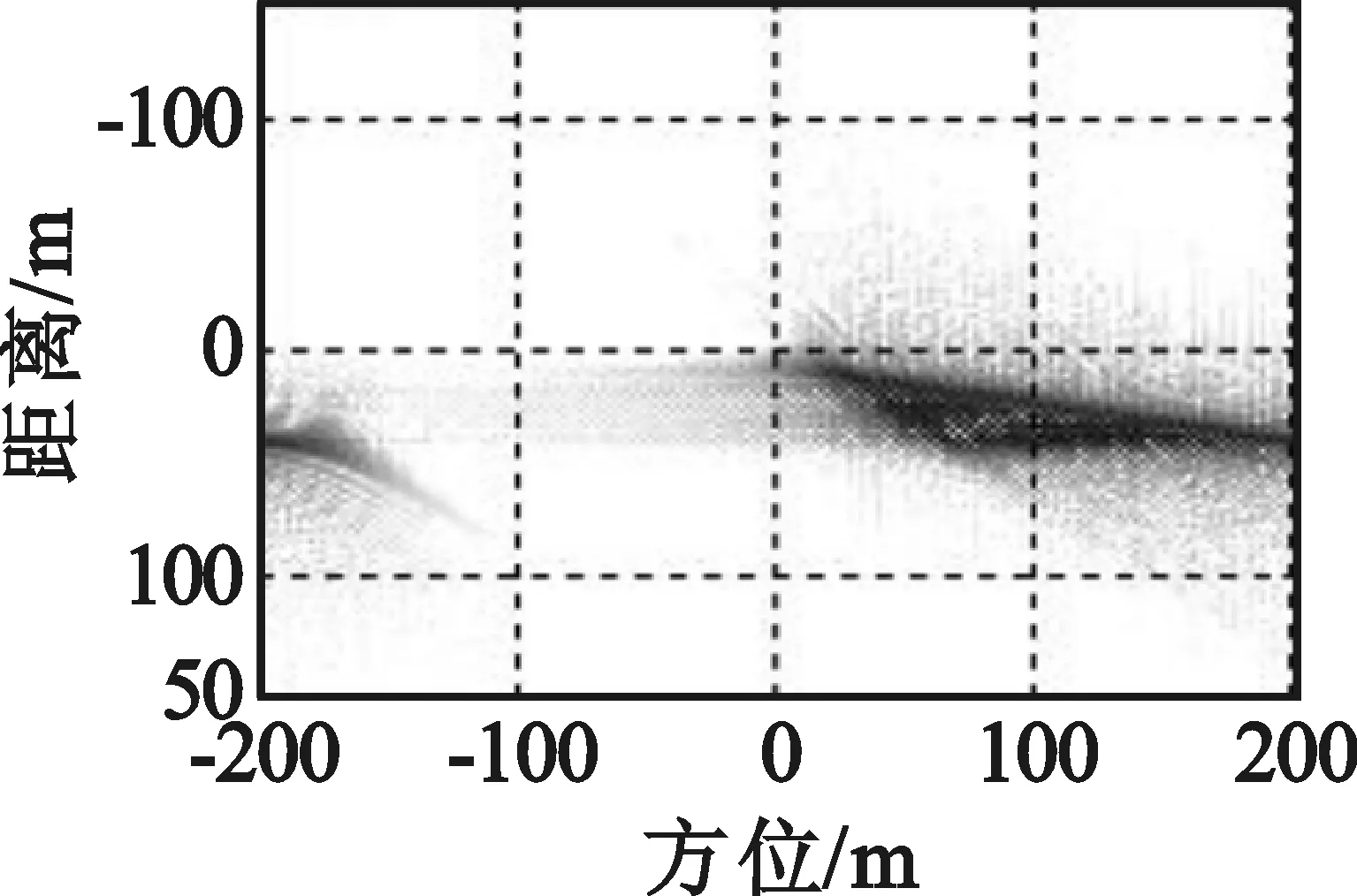
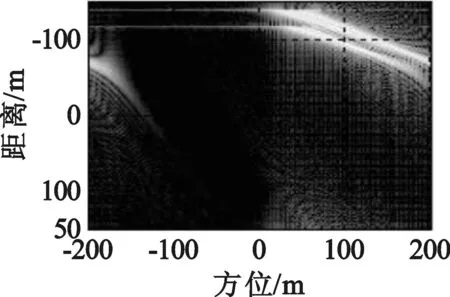
假设飞机运行模式为条带式,根据机载SAR成像的CS算法,在不同的斜视角下对地面目标的成像进行了仿真。系统参数选择如表1所示,仿真结果如图6~10所示。

表1 CS算法仿真参数设置Table1 Simulation parameter configuration

(a)原始信号

(b)距离向匹配滤波后频谱
(c)消除相位误差后频谱
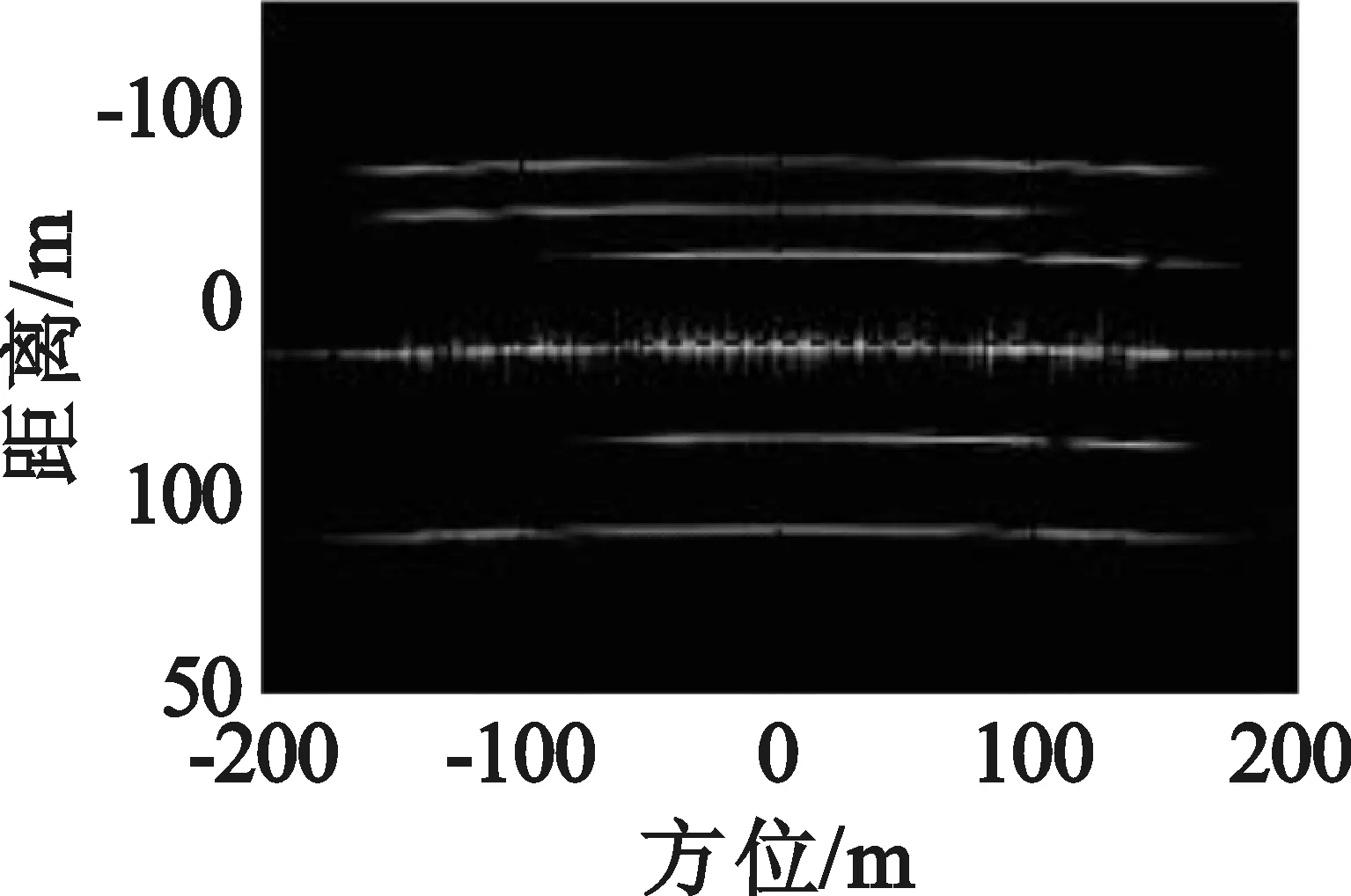
(d)目标图像
(a)原始信号

(b)距离向匹配滤波后频谱

(c)消除相位误差后频谱

(d)目标图像

(a)回波信号

(b)距离向匹配滤波后频谱

(c)消除相位误差后频谱

(d)目标图像
(a)原始信号
(b)距离向匹配滤波后频谱
(c)消除相位误差后频谱

(d)目标图像

(a)回波信号

(b)距离向匹配滤波后频谱

(c)消除相位误差后频谱
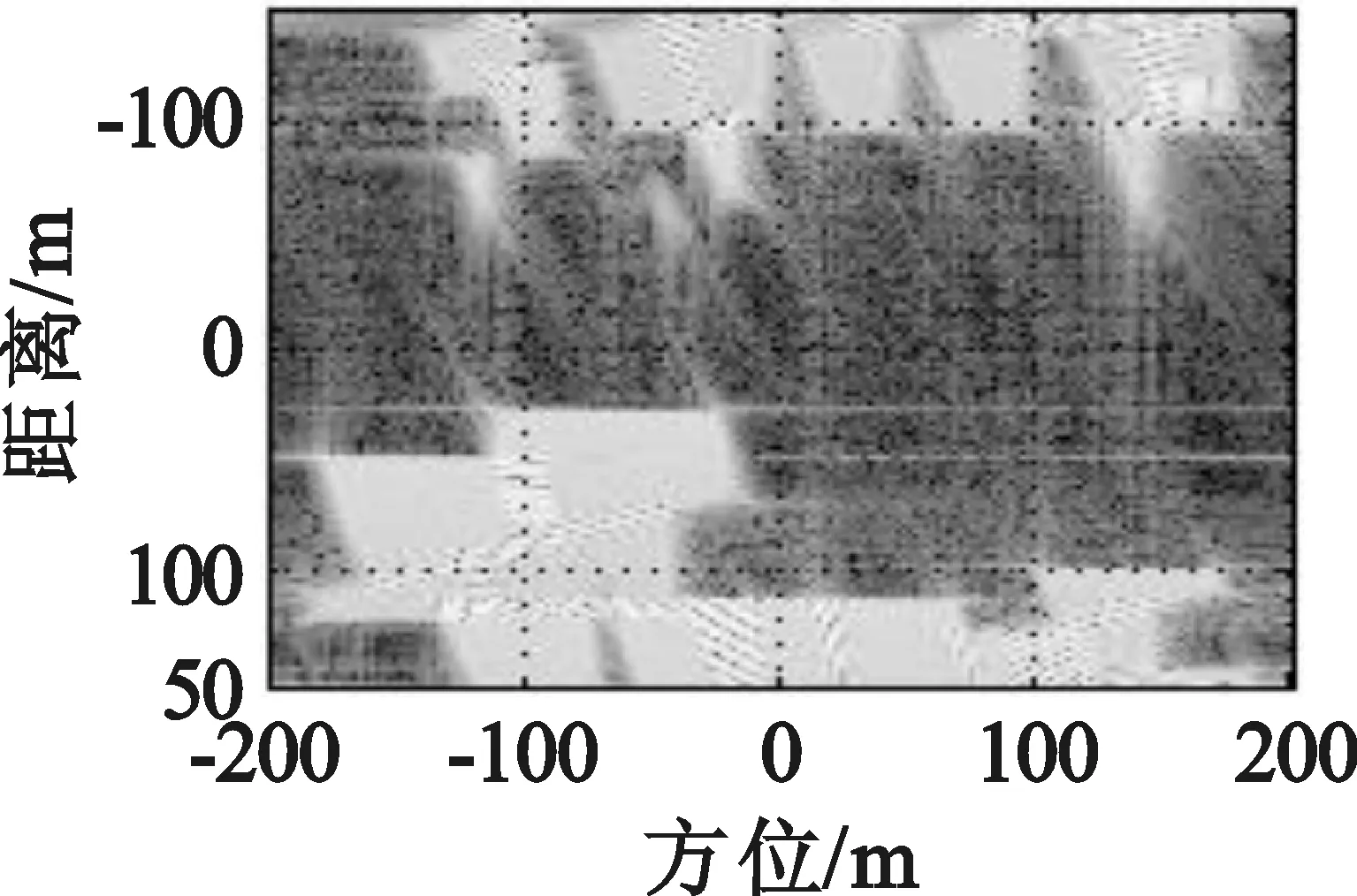
(d)目标图像
由仿真结果可见,正侧视时成像清晰,在斜视情况下使用经典CS算法会产生成像失真,当斜视角超过20°时失真已经严重;在使用改进的距离徙动较正算法之后,成像质量较经典算法有明显的改进,但是在斜视角度较大时仍然会产生成像失真。
5 结 论
斜视情况下距离徙动量较大时,各种成像算法在成像时均存在不足,本文使用了基于距离徙动校正的CS算法,经过推导论证和计算机仿真,实现了对模拟目标回波的成像处理,实验显示改进后的算法计算量小,易于实现,且成像质量有较大幅度的提高,对于机载SAR实时成像技术具有一定的现实意义。但在斜视角较大时,距离弯曲不能忽略的情况下,本算法还是会存在较大的失真,因此算法的改进是下一步的研究方向,而重点在于提高成像质量和减小计算量。
参考文献:
[1] John C Curlander,Robert N Mcdonoug.Synthetic Aperture Radar:Systems and Signal Processing[M].New York:John Wiely & Sons,Inc.,1991.
[2] Bassem R Mahafza.Radar Systems Analysis and Design Using Matlab[M].London:Taylor & Francis Group LLC.,2005.
[3] 刘光炎,雷万明,黄顺吉.基于改进CS算法的侧斜视SAR成像[J].信号处理,2002,18(4):336-339,335.
LIU Guang-yan,LEI Wan-ming,HUANG Shun-ji.Improved CS Algorithms for Squaint SAR Imaging[J].Signal Processing,2002,18(4): 336-339,335.(in Chinese)
[4] 刘光炎,黄顺吉.非线性CS算法的前斜视SAR成像[J].电子与信息学报,2003,25(10):1308-1315.
LIU Guang-yan,HUANG Shun-ji.Nonlinear CS algorithms for forward-squint SAR imaging[J].Journal of Electronics and Infornation Technology,2003,25(10):1308-1315.(in Chinese)
[5] 李悦丽,梁甸农.机载高波段SAR大斜视角成像的大场景聚焦性能研究[J].电波科学学报,2007,30(9):2046-2050.
LI Yue-li,LIANG Dian-nong.Study of the focusing ability in large region based on airborne sar imaging at big squint angel[J].Chinese Journal of Radio Science,2007,30(9):2046-2050. (in Chinese)
[6] 保铮,刑孟道,王彤.雷达成像技术[M].北京:电子工业出版社,2005:151-165.
BAO Zheng,XING Meng-dao, WANG Tong.Technology of Radar Imaging[M]. Beijing:Publishing House of Electronics Industry,2005:151-165.(in Chinese)
[7] 韩传钊,文汉平. 合成孔径雷达-系统与信号处理[M].北京:电子工业出版社,2006:25-60.
HAN Chuan-zhao,WEN Han-ping.Synthetic aperture radar:systems and signal processing[M]. Beijing:Publishing House of Electronics Industry,2006:25-60. (in Chinese)
[8] 卞英琳.合成孔径雷达成像模拟仿真系统[D].南京:南京理工大学,2004.
BIAN Ying-lin.The Imaging Simulation System of SAR[D].Nanjing: Nanjing University of Science and Techonlogy,2004. (in Chinese)
[9] 裘磊. 机载合成孔径雷达成像及定位[D].西安:电子科技大学,2006.
QIU Lei.The Imaging and Locating Techonlogy of SAR[D].Xi′an:Xidian University,2006.(in Chinese)
[10] 李江源.高分辨SAR干扰机理与高效干扰方法研究[D].西安:西安电子科技大学,2007.
LI Jiang-yuan.Study of the mechanism and methods of jamming based on SAR[D].Xi′an:Xidian University,2007. (in Chinese)
