和差极化方式不同导致跟踪问题的分析
2010-09-26
(中国卫星海上测控部,江苏 江阴 214431)
1 引 言
和差通道极化方式不一致的现象在地面站的工程应用中十分罕见,即使出现这种情况,也基本不影响通信,因为大多数地面站无需跟踪。正因为如此,和差极化方式不一致对跟踪的影响在许多参考书中没有相关的理论分析。某次出海执行任务中,船载卫通站首次使用60°E星的圆极化B转发器。由于模拟接收机的设计缺陷,在码头对B极化模式校相时,和差通道均为B极化模式,方位和俯仰误差信号中始终有一轴极性反相。采用和信号为B极化,差通道为A极化方式,才完成了校相。
在船航行过程中,岗位人员发现接收机交叉耦合特性持续恶化,随即在海况较好的某海峡,对接收机进行了重新校相,此时接收机相位与码头时相比减少80°左右,说明相位值发生了严重变化,并且随着地理位置的变化还会不断变化。
本文在单通道单脉冲自跟踪的基础上,利用和差通道解调的数学模型,对和差极化方式不一致导致相位变化的原因进行分析,得出的结论为:和差极化不一致时,船载卫通站跟踪相位变化的原因是极化角和环境因素变化的共同作用。
2 原理阐述
2.1 馈电网络结构
跟踪接收机使用的信号可分为跟踪和信号和跟踪差信号,它们都来自于卫星信标信号,经和差网络合成为一路信号送跟踪接收机。接收机校相就是在误差解调时,调整鉴相器相位以抵消跟踪和信号和跟踪差信号的初始相位差,从而使天线交叉耦合特性满足跟踪要求。
图1为天馈系统的组成框图。跟踪差信号由TE21模耦合器产生,耦合孔耦合出极化正交的左旋差信号ΔL和右旋差信号ΔR。和信号利用的是主模TE11模,直接通过TE21模耦合器无耦合[1]。
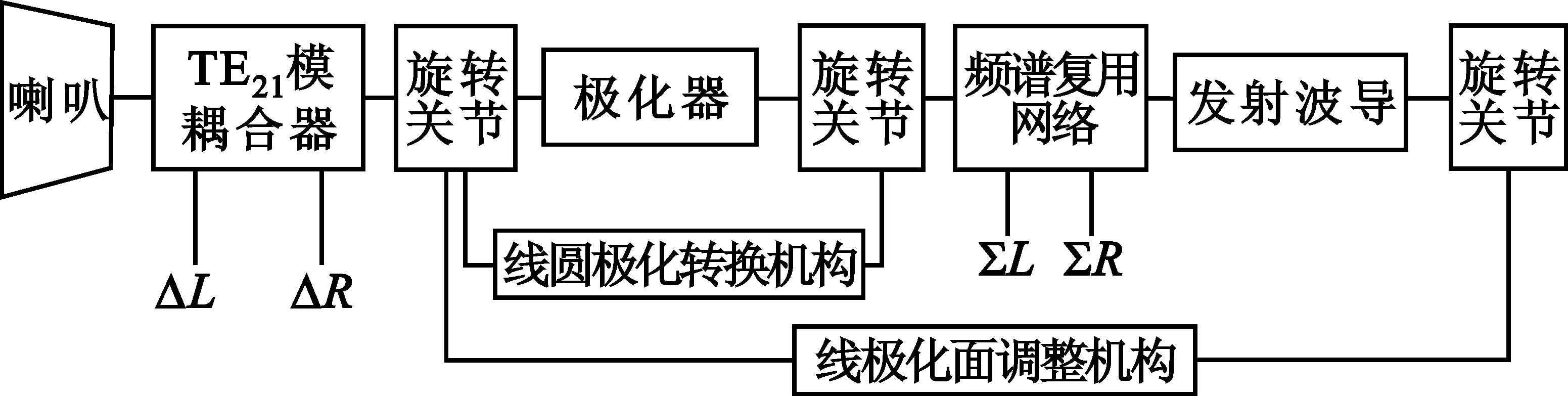
图1 天馈系统组成框图Fig.1 Block diagram of antenna and feed system
2.2 单脉冲单通道跟踪原理
当天线偏离卫星的角度θ足够小时,方位和俯仰的误差电压分别表示为
UAz=kjθcosφ
(1)
UEl=kjθsinφ
(2)
式中,kj为相应的增益调节系数;φ为卫星在与天线轴线相垂直的平面上,与轴线垂直点的连线在水平方向上的夹角(此参数代表误差信号的极性,表明天线偏离在卫星的哪个象限)。
单脉冲单通道跟踪主要利用了馈源波导中差模电磁场的天线方向图轴向为零值,偏轴有极性的特点来实现自动跟踪[2]。和差信号可以表示为
E∑=bcosωτ
(3)
EΔ=bμθcos(ωτ+φ+Δγ)
(4)
式中,b为和信号振幅,μ为归一化误差信号斜率,ω为馈源接收的信标信号频率,θ为天线偏离卫星的角度,Δγ为合路前和差信号的相位差。
2.3 单通道接收机
双通道接收机虽然结构简单,实施方便,但是由于和差支路分别传输,两个支路的相位稳定性必须保持严格一致,否则容易产生交叉耦合。
单通道跟踪接收机是在双通道跟踪接收机的基础上,将差信号经过调制或混频等变换,抑制掉原有频率分量,然后将和、差信号加在一起,通过一个通道传输、变换、解调。单通道接收机的优点是合成后的信号在一个通道内传输,和、差信号的相对相移不变,因此通道对和差信号产生同样的影响。
3 问题分析
3.1 坐标系和公式的重新建立
在第二节我们分析了和差信号的表达公式,许多参考书均使用此信号表达式。实际上,上述简易公式不具有一般性,其表达式有变量遗漏。由于地面站的极化角不变,正常的工程应用中,可以在计算中消掉,所以这些表达式都将极化角变量默认为零(变量在公式中不存在,即视作零),实际上极化角在移动地球站中属于变量。
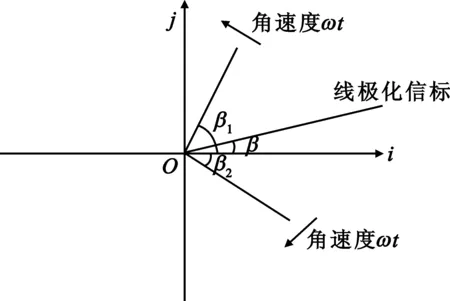
图2 馈源喇叭接收信标矢量分解图Fig.2 Vector decomposition map of signal beacon received by feed horn
图2是重建的复平面大地坐标系,跟踪用的都是线极化信标,该图将信标的极化分解状态完整地表达出来。其中,β为极化角,β1、β2为线极化分解的两个旋向相反的圆极化进入馈源后的初始相位,它们对于线极化信标对称,满足β1+β2=2β(矢量)的关系。由此我们可以得到线极化信标和分解圆极化信标(均为和信号)的表达式分别为[3]
E线=bcosωτejβ
(5)
(6)
(7)
坐标系和公式的重新建立是本文的重点和理论推导的建模基础,理解上述内容有两点重要概念需要厘清:
(1)β1+β2=2β表示的只是数量的传递关系,不是物理意义的传递。两圆初始相位和等于极化角大小的2倍,但不表示线极化信号的初始相位是β,β是线极化角度不是相位,线极化的相位只表现在振幅上;
(2)β1、β2是随机变量,表示线极化信号进入馈源的随机性,β在某一地理位置是常数。
3.2 理论分析
3.2.1相位渐变的原因
使用和差通道极化方式不一样的模式校相时,和信号选B极化,差信号选A极化,由式(3)、式(4)、式(6)和式(7)可知,在合路网络前的和差信号分别为[4]
E∑=kbcos(-ωτ+β1+γ1)
(8)
EΔ=kbμθcos(ωτ+φ+β2+γ2)
(9)
式中,γ1、γ2为在合路器前和差信号分别通过路径的相位。
差信号经过方波调制后:
EΔ=kbμθcos(ωτ+φ+β2+γ2)×c(t)
(10)
由式(10)可以看出,调制后的差信号不含信标频率分量,因此可以与和信号合为一路,合成后的信号经过放大、变频、锁相后,变为
EΣ+EΔ=kbcos(-ω1τ+β1+γ1)+
kbμθcos(ω1τ+φ+β2+γ2)×c(t)
(11)
式中,k为传输通道的电压增益,ω1为经过通道下变频后的和信号角频率。锁相环将频率、相位锁定于和信号,得到用于解调的参考源输出信号为
u(t)=cos(ω1τ-β1-γ1)
(12)

u1(t)=cos(ω1τ-β1-γ1+γ)
(13)
u2(t)=-sin(ω1τ-β1-γ1+γ)
(14)
相位检波器的实质是参考载波与输入信号相乘,设相乘增益为1,则:
u1(t)×(EΣ+EΔ)=cos(ω1τ-β1-γ1+γ)×
[kbcos(-ω1τ+β1+γ1)+
kbμθcos(ω1τ+φ+β2+γ2)×c(t)]
(15)

γ=β1+β2+γ1+γ2=2β+γ1+γ2
(16)
正常工程应用中,当和差极化一致时,接收机的移相值是γ1-γ2。但当和差极化不一致时,由式(16)可知,接收机的移相值不仅与和差通道的相位和γ1+γ2有关,还与线极化信标的极化角有关。极化角随着地理位置的变化而变化,必然导致接收机相位变化。
3.2.2其它因数对相位的影响
和差通道极化一致时,接收机的移相值是γ1-γ2,γ1-γ2属于差分变化,变化量相互抵消,校相后温度等环境因素的影响基本不会导致相位变化;而γ1+γ2的相位变化量相互叠加,温度等环境因素的影响不能忽略。这就得到如下结论:当和差通道极化方式不一致时,由于信号旋向相反,环境因素导致和差通道相位变化,其影响是叠加的。所以当和差通道极化方式不一致时,随着地理位置的变化,相位不但随极化角变化,还应该和温度等环境因素有关。
合路后的单通道相位,在正常的工程应用中可以消掉,但当和差极化方式不一致时,必须代入方程计算。图3是和差通道相位的简易示意图,γ1、γ2是合路前和差信号的各自相位,Δγ是合路后单通道的相位。
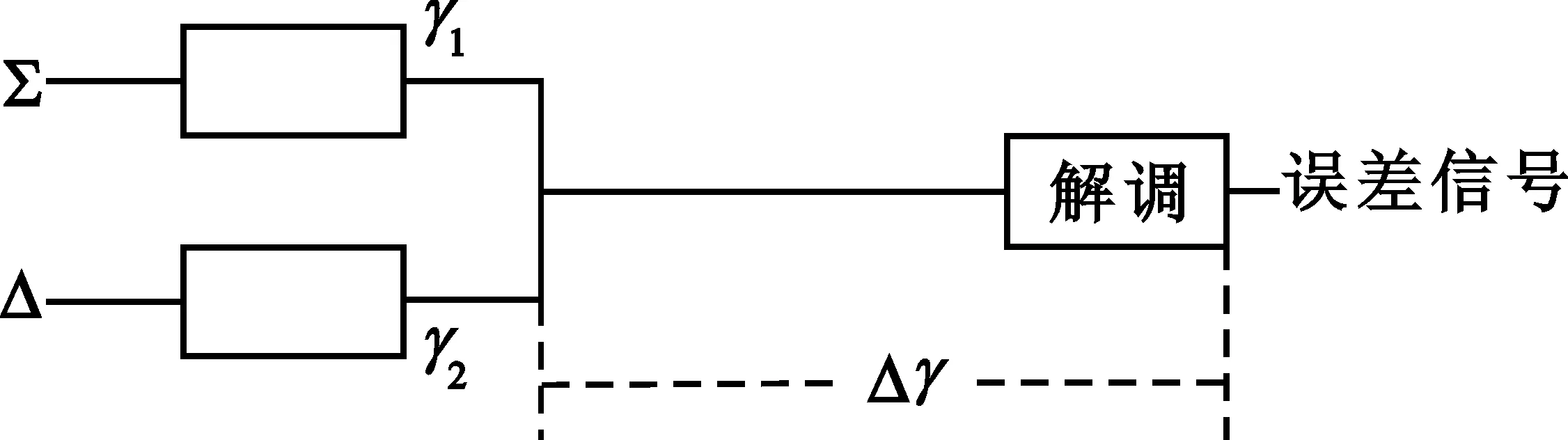
图3 和差通道相位差示意图Fig.3 Diagram of sum and difference channels′ phase

γ=2β+γ1+γ2+Δγ
(17)

(18)

2(Δγ′-Δγ)
(19)
这说明随着地理位置的变化,相位不但随极化角变化,还和温度等环境因素导致和差通道相位的变化值有关。
3.2.3实测验证
对于这一结论,我们用某型号任务记录数据进行了验证,图4是某海域相位测量点,测量点处的接收机相位与江阴码头时的相位值相比减少80°左右。
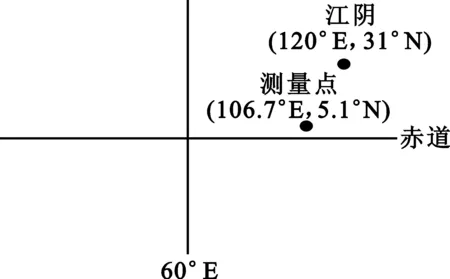
图4 某海域相位测量点Fig.4 Phase diagram of measurement points
2(Δ′γ-Δγ)=80
(20)
式中,极化角变化量为2(β′-β)=2(83-55)=56。
实测相位变化80°,极化角对应的相位变化量56°,其它因素导致的和差通道相位变化量为24°,这证明了随着地理位置的变化,相位不但随极化角变化,还和温度等因素有关。
4 结束语
如果将和差通道极化模式分别设置为A、B模式,在码头可以顺利校相并且跟踪良好。但是出海后随着地理位置的变化,交叉耦合会持续恶化,直至无法跟踪。原因在于正常情况下跟踪圆极化信标不需要考虑极化角的变化,但在和差极化模式不一致时,极化角和环境因素的变化均会导致相位变化。这是测量船特有的隐患,在相关专业书籍上都没有这一现象的描述,因为地面站不存在地理位置的变化,即使和差极化模式不一致也不会出现跟踪问题。所以,作为测量船的卫通操作人员一定要理解A、B极化的区别,制定严谨的倒换规程和严格的倒换步骤,避免测量船在和差极化不一致的情况下出海。
参考文献:
[1] 柯树人. 圆波导线极化TEll模和圆极化TE21模自跟踪体制[J]. 通信与测控,2003,27(1):260-265.
KE Shu-ren. Circular waveguide mode linear polarization TEll and TE21 mode auto-tracking system [J]. Communication and Control, 2003,27(1):260-265.(in Chinese)
[2] 李强. 单脉冲跟踪接收机研究[D]. 西安:西安交通大学,2003.
LI Qiang. Research of Monopulse Tracking Receiver[D]. Xi′an:Xi′an Jiaotong University,2003. (in Chinese)
[3] 王雪松,李永祯. 电磁波瞬态极化的统计特性[J]. 中国科学(E辑),2004,34(8):919-921.
WANG Xue-song, LI Yong-zhen. Statistical characteristics of electromagnetic wave polarization [J]. Science in China(Series E), 2004,34(8):919-921. (in Chinese)
[4] 李靖. TE2l模单通道自跟踪系统[J]. 无线电通信技术,2005,31(6):43-44.
LI Jing.TE2l single-mode self-tracking system [J].Radio Communications Technology,2005,31(6):43-44.(in Chinese)
[5] 林培通. 卫星接收极化角计算公式的推导[J].宁德师专学报,2004,16(4):400-402.
LIN Pei-tong. Satellite receiver polarization angle calculation formula [J]. Journal of Ningde Teachers College,2004,16(4):400-402. (in Chinese)