新型的内嵌式永磁同步电机弱磁转速控制
2010-09-20同济大学电子与信息工程学院电气工程系上海201804徐国卿袁登科
同济大学 电子与信息工程学院电气工程系(上海201804) 陈 莉 徐国卿 袁登科
1 引言
近年来,内嵌式永磁同步电机(IPMSM)被广泛应用于工业驱动应用中。由于电流型PWM逆变器驱动的IPMSM具有驱动效率高,功率密度高,瞬态转矩平滑,动态响应快,转子机械结构坚实等特点,其应用性能受到高度的关注。T.M.Jahns在其1986年发表的论文[1]中指出,IPMSM是一种适用于可调速操作的理想电机。此后二十多年中,大量关于IPMSM控制策略的论文相继发表[2]~[6]。IPMSM具有转子结构特殊,磁极凸出的结构特点和较大的电枢电感。其转子磁路结构的不对称性所产生的磁阻转矩有助于提高电机的过载能力和功率密度,气隙小,与表面凸出式永磁同步电机(SPMSM)相比,更易于利用电枢反应实现弱磁控制[8],扩大转速范围。上世纪90年代中期之前的研究主要集中于在转子dq坐标系下的IPMSM数学模型,反电势的谐波分量和定子漏电感往往忽略不计,导致低速时转速波动较大[4]。另外,在弱磁区域内使用六步电压法[2]或准六步电压法,可以对瞬态转矩实现间接控制,使其从电流控制转变为定子电压控制。但是,这一做法往往会降低转矩控制的性能。
本文针对瞬态转矩直接控制,提出了一种新的控制策略。本策略能对定子电流和转矩进行直接控制,有效简化IPMSM驱动系统,并且获得更大的调速范围。电流环和转速环能对齿槽转矩进行补偿,同时抑制转矩纹波。另外,这种新的控制策略能实现恒转矩区和弱磁区之间快速平滑的切换。
2 弱磁控制分析
2.1 IPMSM的数学模型
对于三相绕组电动机,在dq坐标系下建立IPMSM的数学模型,便于分析IPMSM控制过程系统的稳态和动态性能,其中d轴与转子磁场同向。忽略漏磁通的影响、铁芯饱和效应及涡流和磁滞损耗,转子上无阻尼绕组,永磁体也没有阻尼作用,电机各相绕组电阻相等。正交电流分量 id和 iq分别为瞬态定子相电流在d轴、q轴上的分量。转子磁链在气隙中呈正弦分布。通过调节稳态正弦激励状态下的正交电流 id和 iq,实现对转矩的控制。相应的IPMSM电压公式与转矩转矩公式如下:

其中,ud、uq、id和 iq分别是定子电压和定子电流在dq轴上的正交分量。ωe为电角速度,ωe=pωr(elec.rad/s)。φf、Ld和 Lq分别为定子反电势常数和电感在dq轴上的分量。p为极对数。
从转矩公式中可以看出,永磁同步电机输出转矩包含两个分量,一是由两磁场互相作用所产生的电磁转矩 Tm,以及由凸极效应引起,并与两轴电感参数的差值成反比的磁阻转矩 Tr。为了得到更高转矩和最大效率,有必要对两部分转矩同时进行控制。
2.2 弱磁控制
当转速在转折频率以下时,电机输出恒定转矩;当转速上升直至超过转折频率之后,恒功率输出。
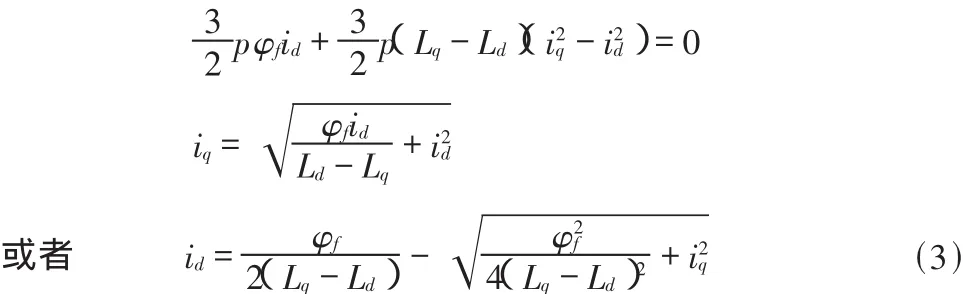
由(2)可得IPMSM在dq坐标系下的最大转矩/电流公式,如(3)所示:
当转速在转折频率以上时,由于永磁体的励磁磁链为常数,电机感应电动势随电机转速成正比例增加,电机感应电压也随之提高,但永磁同步电机的相电压有效值的极限值 umax和相电流有效值的极限值 imax受到与电机相连的逆变器的直流侧电压和逆变器的最大输出电流的限制。
当电枢电压达到极限值时,为了使电机能以更高的转速运行,必须维持电机内部的反电势与其在额定状态时的大小相等。反电势与转速和气隙磁通的乘积成反比。因此,在电枢电压额定的条件下,励磁磁场被定子电枢反应磁场削弱的同时,定子电枢反应磁场的空间转速相对于电枢绕组在不断提高,即为弱磁升速。
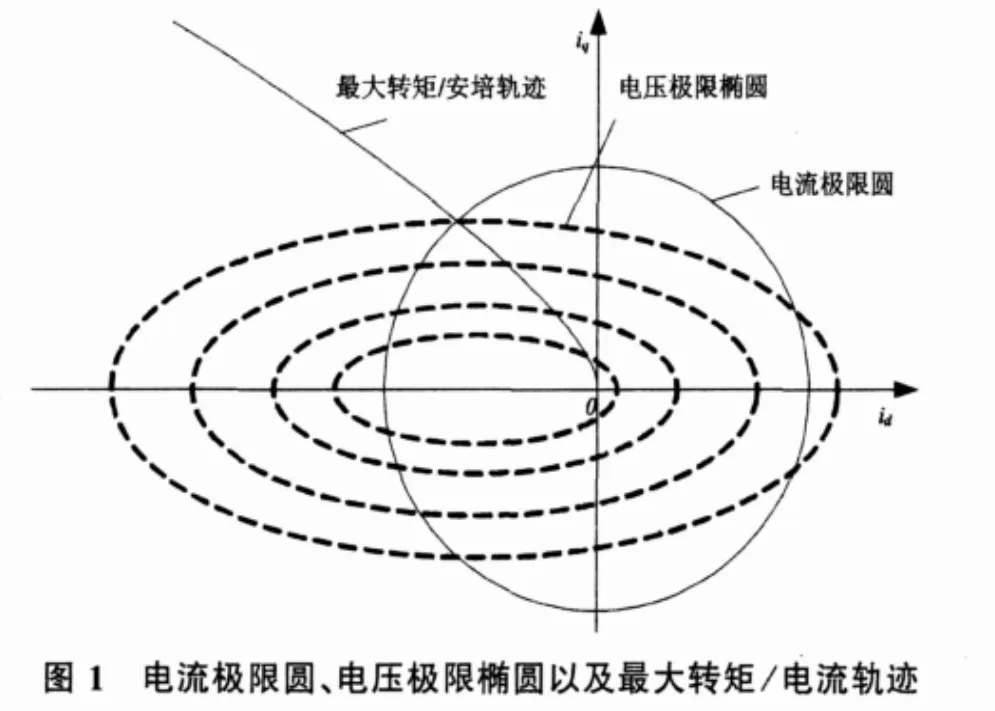
电枢电流与电枢电压受到逆变器的限制,分别不超过逆变器允许最大相电流和最大相电压:

其中,imax和 umax分别为最大电流和最大电压,Vdc为逆变器直流侧输入电压。不等式(4)和(5)所描述的轨迹分别为不同转速下的电流极限圆和电压极限椭圆(图1)。
将(1)代入(5)中,可得

由上式可以推导出电压极限椭圆轨迹公式如(6)所示:

输出功率为:
3 内嵌式永磁同步电机弱磁控制策略
从上节(2)式可以看出,当永磁同步电机永磁体产生的磁链φf和直交轴电感 Ld、Lq确定后,电机的电磁转矩 Te便取决于定子电流矢量 is,而 is的大小和相位取决于 id和 iq。因此只要控制 id和 iq便可以控制电机的转矩。一定的转速和转矩对应于一定的 id和 iq。分别比较永磁同步电机的电流实际值 id、iq与给定值、实现其转速和转矩控制。并且,id和 iq独立控制,便于实现各种先进的控制策略。
3.1 恒转矩区
在恒转矩区内,采用最大转矩/电流控制(MTPA),也称单位电流输出最大转矩的控制。采用最大转矩/电流控制时电机的矢

可推得,当电机运行在最大转矩/电流控制下,定子电流矢量轨迹的方程式如式(3)所示,定子电流分量 id和 iq分别满足该控制规律。

当电机电压和电流分别达到极限值 umax和 imax时,电机在最大转矩/电流控制策略下可求得恒转矩运行到A点的转折转速ωc如式(8)。

因此,在恒转矩区内,最小定子电流矢量沿MTPA轨迹从圆点运动至A点,同时转矩给定由最小定子电流确定。
3.2 弱磁I区
随着转速的继续上升,电压极限椭圆不断缩小。当永磁同步电机端电压不断增加,达到逆变器最大电压 umax时,电机转速达到转折频率,此时电流矢量达到A点。由于电机的反电势升高,当电机的端电压达到逆变器能够输出的最高电压,定子电流无法再跟随给定电流从而引起电流调节器饱和。在没有弱磁控制的情况下,电流调节器饱和致使定子电流 is沿电压极限椭圆向q轴正半轴偏转。在弱磁控制下,定子电流矢量则会沿电流极限椭圆向d轴移动直至B点,定子电流 is恒为极限值 imax。转折频率点A,即电流极限圆与电压极限椭圆的交点,所对应的定子电流分量 id和 iq分别满足控制规律(9)。

由此,电流调节器进入弱磁控制区,输出功率恒定,转矩下降,转速继续上升。
3.3 弱磁Ⅱ区
当转速进一步增加,电流调节器随即进入弱磁Ⅱ区[7]。此时,转矩受到最大电压的限制:
! 仿真研究
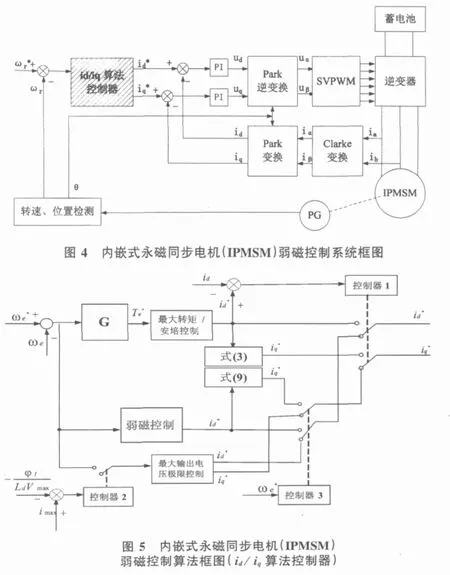
本文所给出的弱磁控制策略是对基本前馈转矩控制系统的一种改进。图4是内嵌式永磁同步电机弱磁控制系统框图,其控制算法框图如图5所示。
4.1 电流调节器饱和辨识
新型弱磁控制算法的关键在于电流调节器饱和的辨识。随着转速不断提升,电机反电势也随之升高,当电机的端电压达到逆变器能够输出的最高电压,定子电流将不能很好地跟随给定电流,由此引起电流调节器的饱和。对电流调节器在高度段的过早饱和进行监视和预测是提高弱磁控制效率的前提。
一般,将电机负载情况下的端电压与空载时的端电压之比定义为电机的端电压比 K,并利用该端电压比对电流调节器饱和进行检测。K的定义式为:

本文中所提出的新型控制算法利用直轴电流给定i*d与实际值 id之间的差值Δid来判断电流调节器是否进入饱和[2]。在电流调节器进入饱和之前,Δid往往非常微小。只有在增益相当大的情况下,微小的误差能被检测出来。然而,随着电流调节器进入饱和的程度加深,该电流误差激增,能够被观测出来。控制器1为直轴电流误差观测器。当电流调节器进入饱和之后,控制器1控制定子电流矢量有MTPA控制转向弱磁控制。
4.2 弱磁Ⅱ区的判断与控制策略的切换
4.3 仿真分析
为评价本文所提出的新型永磁同步电机弱磁控制策略的可行性和有效性,进行仿真研究。
所用的电机为凸极电机,其系统参数如下:逆变器限定电压值ulim=70V,定子电流限定值 ilim=5A,直轴电感 Ld=0.0437H,交轴电感 Lq=0.0512H,定子电阻 R=0.25Ω,电机极对数 N=4,ψr=0.185Wb,电机负载转矩 Tl=0。
从图6可以看出,在本文中所提出的新型控制策略控制下,无论是在有弱磁Ⅱ区的情况下的表现或是无弱磁Ⅱ区情况下的表现,永磁同步电机在稳态时能达到的最高转速都接近完全弱磁控制时的最高转速。

5 结语
本文提出了一种新的基于电流调节器饱和算法的内嵌式永磁同步电机弱磁控制策略。对弱磁控制进行深入的研究,对弱磁Ⅰ区和弱磁Ⅱ区采用不同的控制策略。利用3个控制器分别对电流调节器的饱和、弱磁Ⅱ区和电流矢量控制策略进行监控。仿真结果充分显示了该控制方案的可行性和有效性。
[1]T.Jahns,G.Kliman and T.Neumann.Interior Permanent-magnet Synchronous Motors for Adjustable-Speed Drives.IEEE Trans,on Ind.Appl.,1986,7/8:IA-22,738~747.
[2]T.M.Jahns.Flux-Weakening Regime Operation of an Interior Permanent-Magnet Synchronous Motor Drive.IEEE Trans,on Ind.Appl.,1987,4:IA-23,681~689.
[3]B.K.Bose.A High-performance Inverter Fed Drive System of an Interior Permanent Magnet Synchronous Machine.IEEE Trans.On Ind.Appl.,1988,9/10:IA-24,987~997.
[4]M.F.Rahman,L.Zhone.and K.W.Lim.A DSP based instantaneous torque control strategy for interior permanent magnet synchronous motor drive with wide speed range and reduced torque ripples.Conf.Rec.IEEE-IAS,1996,518~524.
[5]B.H.Bae,N.Patel,S.Schulz,and S.K.Sul.New Field Weakening Technique for High Saliency Interior Permanent Magnet Machines. Conf.Rec.IEEE-IAS.Oct.2003.
[6]Gi-Young Choi,Mu-Shin Kwak,Tae-Suk Kwon and Seung-Ki Sul.Novel Flux-Weakening Control of an IPMSM for Quasi Six-Step Operation.IEEE Trans.On Ind.App.Conf.2007,9:23 ~ 27.
[7]Gabriel Gallegos-Lopez,Silva Hiti.Optimum Current Control in the Field-Weakened Region for Permanent Magnet AC Machines.IEEE Trans.On Ind.App.Conf.2007,9:2154 ~ 2160.
[8]李崇坚.交流同步电机调速系统[M].北京:科学出版社,2006.