一种基于信息融合的深空巡航段自主导航算法
2010-09-18常晓华崔平远崔祜涛
常晓华,崔平远,崔祜涛
(哈尔滨工业大学 深空探测基础研究中心,黑龙江 哈尔滨 150080)
0 引言
自主导航技术能减少操作的复杂性,增强探测器的自主生存能力,并为姿态控制、机动规划和轨道控制等自主能力提供支持,扩展探测器的空间应用潜力,因此逐渐成为深空探测任务的研究热点。光学导航是深空探测中广泛采用的一种自主导航方式,先后在Mariner系列、Viking任务、Galileo探测器、Stardust任务和Deep Space 1任务中进行了验证,并成功应用于Deep Impact,SMART-1,MUSES-C等深空探测任务[1~4]。由国外探测任务可知,自主光学导航方法主要用于深空接近交会段、绕飞段和下降着陆段。文献[5]研究了基于地月信息的自主光学导航方法在分离段中的应用。对自主光学导航方法在巡航段中的应用,其主要限制是缺乏足够星历精确的可见参考目标,从而影响了导航系统的轨道确定精度。
考虑小行星的数量和空间分布的紧密性,美国JPL实验室的BHASKARAN等针对Deep Space 1任务研究了以小行星作为导航信标的深空巡航段光学导航方法[6]。在任务实施前,地面操控中心根据该任务的轨道特点,综合视星等、太阳相角、视运动、三星概率、探测器与小行星距离和视线夹角等选取标准,对小行星进行规划和筛选,获得不同轨道段内的最佳观测方案,并更新相应信标小行星的星历信息。不同的任务轨道,小行星观测方案各异。若飞行轨道发生改变,则需重新筛选导航小行星。
在深空探测的巡航段尤其是巡航段初期,考虑小行星的筛选准则和导航相机的拍照序列规划,致使可用于导航系统的小行星图像信息不一定满足任务要求[7]。另外,对更遥远的外太阳系探测等深空探测任务,地面站观测获得的小行星星历信息误差较大,且在任务实施之前难以对其进行更新,从而无法获得符合轨道要求的小行星观测方案。可见,自主光学导航方法在深空巡航段中的应用还需进一步的研究。
对深空探测的行星际巡航段,太阳是最稳定也是最重要的参考天体。文献[8]研究了以太阳视线矢量为观测量的自主导航方法,并用解析法分析了太阳视线矢量对导航参数的可观测性,但因仅使用太阳视线信息,自主导航系统的可观测度较低,导航精度不高,单纯依赖太阳视线矢量的导航方法并不可行。
为此,针对深空探测巡航段的轨道确定,本文对一种基于信息融合的深空巡航段自主导航算法进行了研究。
1 状态方程
在日心惯性坐标系中,深空探测器的轨道动力学模型可表示为
式中:r,v分别为日心惯性系内探测器的位置和速度,且r=‖r‖,r=[x y z]T,;μs为太阳引力常数;μi为第i个摄动行星引力常数;rpi为日心惯性系内第i个摄动行星的位置矢量;rri为第i个摄动行星相对探测器的位置矢量,且rri=rp i-r;np为摄动行星数,取np=6;a为未建模的摄动加速度矢量。
选取状态变量X=[rTvT]T,根据轨道动力学模型可得导航系统的状态方程为
式中:w为系统模型误差;X为系统状态。
2 观测方程
利用太阳敏感器测量太阳相对探测器的视线矢量,同时利用分光计进行单程多普勒测量,从而获得探测器相对太阳的径向速度,其观测模型如图1所示。图中:ls为太阳相对于探测器的视线矢量;vr为探测器相对太阳的径向速度。测量过程中,所有姿态信息均由姿态控制系统提供。

图1 导航系统观测模型Fig.1 Observation model of navigation system
2.1 太阳矢量观测方程
现代高精度太阳敏感器多采用电荷耦合器件(CCD),如Solar-A探测器采用的高精度CCD太阳敏感器,测量精度为0.001°;俄罗斯地球物理协会(Geofizika)研制的视场为92°×92°的CCD太阳敏感器,其测量精度为角秒级[9]。
如图1所示,太阳视线矢量的观测模型为

考虑太阳敏感器的测量误差时,可得太阳矢量的观测方程为

式中:v1为太阳视线矢量的观测噪声,假设其为零均值高斯白噪声。
2.2 径向速度观测方程
通过分光计测量探测器相对太阳运动产生多普勒频移,可得日心惯性系中探测器的径向速度

考虑测量误差时,径向速度的观测方程为

式中:v2为径向速度的观测噪声,取其为零均值高斯白噪声。
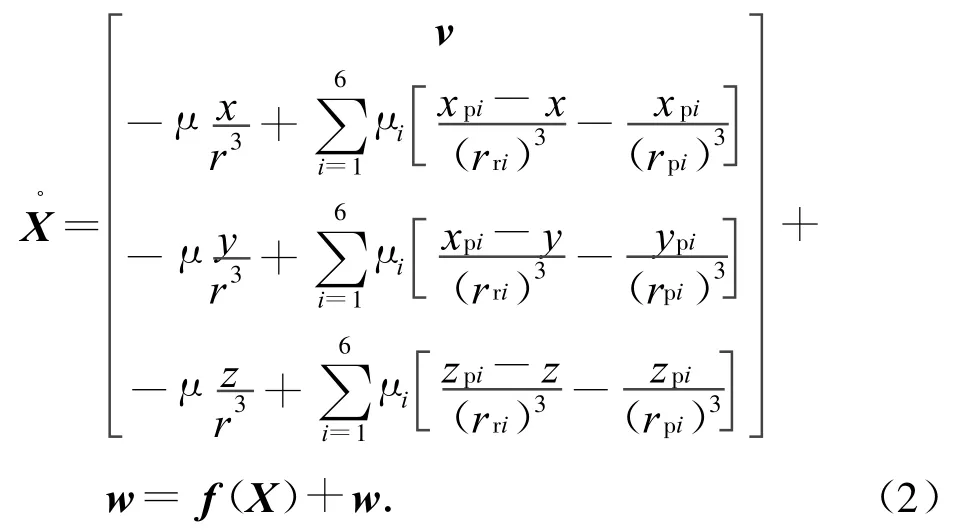
由多普勒频移的测量原理可知,多普勒频移与信号频率成正比。径向速度1 mm/s时不同信号频率的多普勒频移见表1[8]。太阳辐射中可见光的频率为3.842×1014~7.878×1014Hz,可直接作为分光计的入射光谱,径向速度测量精度可达1 cm/s。
表1 多普勒频移Tab.1 Doppler shift
3 基于信息融合的导航滤波算法
自主导航系统的状态方程见式(2),其状态模型误差的协方差阵E[w(k)(w(k))T]=Q;系统的观测方程分别为式(4)、(6);观测噪声的协方差阵分别为E[v1(k)(v1)(k)T]=R1,E[v2(k)v2((k))T]=R2。
3.1 信息分配
信息分配是在主滤波器和各子滤波器间分配系统的信息。系统噪声Q和状态方差Pg按信息分配原则
信息分配因子选择的基本原则是在满足信息守恒原理的前提下与局部滤波器的滤波精度成正比。根据局部滤波器的估计精度动态确定信息分配因子,能更好地反映子系统估计精度的变化,减小子系统失效或精度下降的影响。由矩阵理论可知:卡尔曼滤波中估计误差协方差阵P的奇异值包含了系统各状态估计的自协方差信息,以及各状态估计的互协方差信息,反应了局部滤波器的滤波性能[10]。因此,本文用P的奇异值动态确定信息分配因子。令

3.2 各子滤波器的状态与测量更新
各子滤波器的状态和测量更新方程为
3.3 信息融合
经并行运算的各子滤波器的处理可得2个局部最优估值Xi(k),在主滤波器中按
融合,得全局最优估值。
4 仿真
4.1 条件
以深度撞击任务的实际飞行数据验证本文的基于信息的深空巡航段自主导航算法。深度撞击任务的行星际飞行时间从2005年1月18日至7月2日,初始与最终时刻探测器的位置和速度见表2[11]。深度撞击任务中地球、Tempel/9P彗星和Deep Impact-1探测器的飞行轨迹如图2所示。
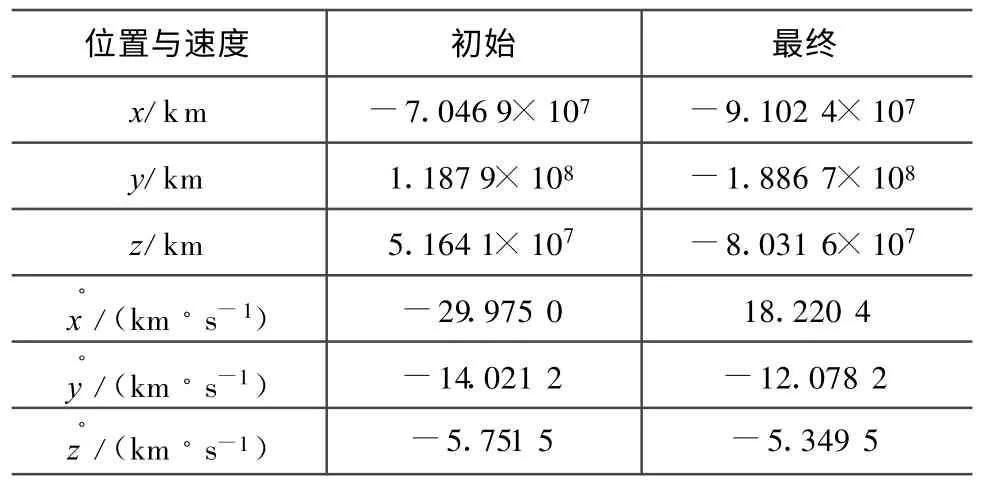
表2 探测器始末时刻的位置和速度Tab.2 Position and velocity at initial time
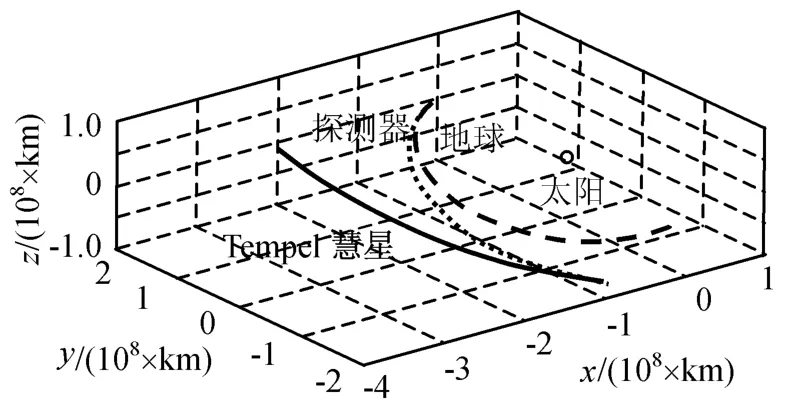
图2 深度撞击任务的飞行轨迹Fig.2 Trajectory of the Deep Impact mission
a)标称轨道数据源于深度撞击任务,初始位置误差6×105km,速度误差0.1 km/s;
b)取太阳视线矢量测量误差5×10-5rad,探测器相对太阳的径向速度测量误差为1×10-5km/s;
c)考虑到探测器各任务系统间的规划调度及各种测量信息的处理时间,取T=300 s,仿真时间Tf=2.1×106s。
4.2 结果与分析
用本文方法仿真所得探测器的位置和速度估计误差分别如图3、4所示,仿真结束时刻探测器的位置和速度估计误差见表3。
由仿真结果可知:最终位置估计误差小于95 km,速度估计误差小于5×10-5km/s,表明本文的基于信息融合的深空巡航段自主导航算法的轨道参数估计结果满足深空巡航段的精度要求。另仿真中发现姿态估计精度和敏感器的测量精度是影响导航系统轨道参数估计精度的主要因素。
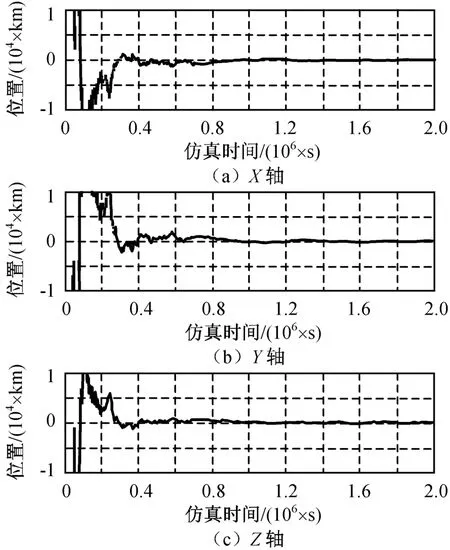
图3 探测器位置估计误差Fig.3 Position estimation error
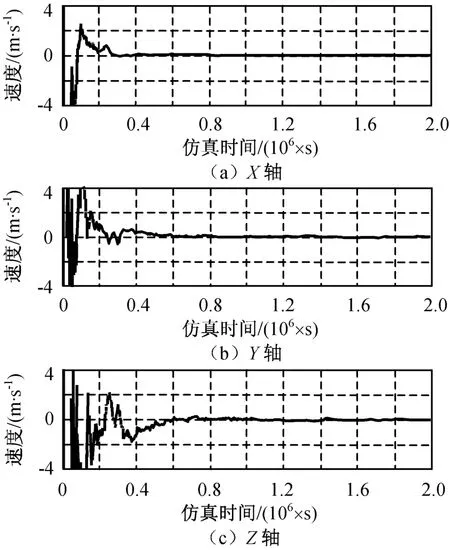
图4 探测器速度估计误差Fig.4 Velocity estimation error
5 结束语
为确定深空巡航段轨道,本文提出了一种基于信息融合的自主导航算法。基于太阳敏感器测得的太阳视线矢量和分光计测得的探测器相对太阳的径向速度两种不同类型的观测信息,用信息融合技术和扩展卡尔曼滤波估计探测器的位置和速度。深度撞击任务的实际飞行数据仿真结果验证了该自主导航算法的可行性。

表3 探测器位置和速度估计误差Tab.3 Position and velocity estimation error at f inal time
[1]DESAI S,HAN D,BHASKARAN S.et al.Autonomous optical navigation(AutoNav)technology validation report[R].Deep Space 1 Technology Validation Report-Autonomous Optical Navigation(AutoNav),JPL Publication 00-10,2000.
[2]MASTRODEMOS N,KUBITSCHEK D G,WERNER R A,et al.Autonomous navigation for the Deep Impact[C]//Proceedings of the AAS/AIAA Space Flight Mechanics Meeting.Tampa,Florida:AIAA,2006:1251-1271.
[3]MARINI A E,RACCA G D,FOING B H.SMART-1 technology preparation for future planetary missions[J].Advances in Space Research,2002,30(8):1895-1900.
[4]KUBOTA T,HASHIMOTO T,KAWAGUCHI J,et al.Navigation,guidance and control of asteroid sample return spacecraf t:MUSES-C[C]//Proceedings 4thESA International Conference on Spacecraft Guidance,Navigation and Control Systems,ESTEC.Noordwijk,Netherlands:ESA,1999:ESA SP-425 2000,511-516.
[5]WU W R,TIAN Y L,HUANG X Y.Autonomous optical navigation for interplanetary exploration based on information of earth-moon[J].Journal of Harbin Institute of Technology(New Series),2003,10(3):343-348.
[6]BHASKARAN S,DESAI D,DUMONT P J.et al.Orbit determination performance evaluation of the Deep Space 1,autonomous navigation system[C]//Proceedings of the AAS/AIAA Spaceflight Mechanics Meeting.Monterrey,CA:AAS,1998,98-193,1295-1314.
[7]徐文明,崔祜涛,崔平远,等.深空自主光学导航小行星筛选与规划方法研究[J].航空学报,2007,28(4):891-896.
[8]GUO Y P.Self-contained autonomous navigation system for deep space missions[J].Advances in the Astronautical Sciences,1999,102(2):1099-1113.
[9]章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,1998.
[10]付梦印,邓志红,张继伟.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003.
[11]BLUME W H.Deep impact mission design[J].Space Science Reviews,2005,117:23-42.