一种多传感器数据融合系统方案研究
2010-09-13杨风暴周新宇
齐 伟, 杨风暴, 周新宇
(中北大学 信息与通信工程学院,山西 太原 030051)
0 引言
近年来,多传感器信息融合技术在军事领域受到了广泛的关注。从表面上看多传感器的概念很直观,但实际上要真正实现一个多传感器融合系统是比较困难的[1-2]。由于多传感器融合系统具有改善系统性能,增强系统的可靠性的巨大潜力。许多学者还是对多传感器融合进行深入研究[3]。
主要针对单个传感器的决策数据进行多传感器的二次融合,提出一种多传感器融合方案。
1 融合源数据
需要融合的数据为单传感器决策后的数据。通过分析信息报的数据,可以分为三大类的数据。第一类是目标固有属性,与获取信息报的时间无关(如:目标编号、获取时间、获取单位等);第二类是目标状态属性,随时间的变化而变化(如:目标属性、目标等级、目标数量等);第三类数据不需要融合只需要选择性的修改(如:目标经度、目标维度、目标速度、目标高度等)。
2 融合系统的方案
针对这种数据类型的特点,提出的融合方案如图1所示。
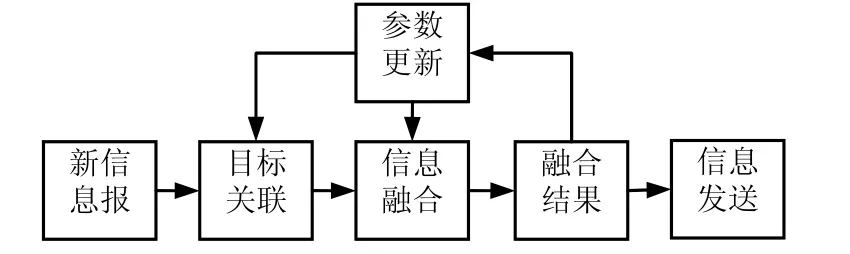
图1 融合方案
融合过程采用序贯的处理方式,即接收一个信息报,处理一个。首先,将接收信息报与已知目标进行关联。其次,关联的信息报进行融合。最后,将多传感器融合的结果反馈,修改参数并发送结果。这样就完成了一个完整的融合过程。
3 算法分析
3.1 运动状态预测算法
目标关联和信息融合中运动状态数据的使用与时间有关联,只有调整到同一时刻的数据进行处理才有意义。
运动状态预测采用二阶线性预测。假设有三个时刻t0、t1、t2,t0和t1时刻的信息报已接收,t2为需要预测到的时刻。具体实现如下:ax、ay表示加速度的X轴与Y轴的分量,v2x、v2y表示在t2时刻速度的X轴与Y轴的分量,

x2、y2表示在t2时刻目标X轴与Y轴的位置。首先,通过式(1)、式(2)、式(3)和式(4)分别计算出加速度分量、t2时刻的速度、t2时刻目标的位置与 t2时刻目标的运动速度和方向。
3.2 目标关联算法
关联时采用图 2关联方案进行处理,关联算法分为 3个步骤:
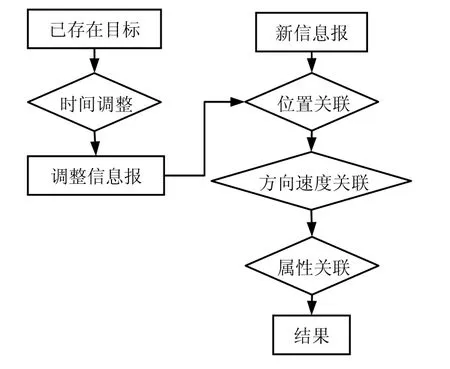
图2 目标关联方案
①时间调整:3-1中的运动状态预测算法,将不同时刻信息报的状态数据调整到同一时刻进行位置的比较。选取距离之差在阈值之内的进入下一步;
②速度与方向关联:筛选速度和距离之差在阈值范围的目标;
③属性关联:如果新信息报仅与一个已存在目标粗关联,将新信息报与该目标关联;如果新信息报与多个已存在目标粗关联,选取两者的属性最接近的关联;如果新信息报未与已存在的目标粗关联,那么将新信息报作为新目标的起始信息报。
3.3 目标融合算法
在关联完成后,获取新信息报传感器所得到的信息报进行融合,称为单传感器融合。单传感器融合目标的属性数据,主要为枚举类型数据,融合时采用投票法。以目标等级这个属性为例[4],实现过程如下:
设传感器i获取目标j的不同时刻的目标等级数据分别为:g0,g1,…,gn其中下标为获取信息报的时间顺序,gn为最新时刻的目标等级。目标等级共为 10级,每一级的票数记为d1,d2,…,d10,使用 g0,g1,…,gn数据投票。(n + 1 )对应的目标等级为g。

如果p大于0.4并且最新的三个数据与其相等,那么融合结果就为否则将最新信息报的目标等级加16返回。这个值表示单传感器不能判断目标等级。参考值为d与二进制数1111逻辑与,即g10。
在多传感器融合中,处理的数据包括目标的属性与目标运动状态的信息。
目标属性的融合同单传感器融合类似。只是在投票时使用可信度进行投票。当数据值大于 16时,表示单传感器不能做出判决,不使用该数据。当最后出现不能确定情况时,选取威胁较高的作为融合结果。
目标运动状态融合:假设所有的单传感器融合数据已经调整最新融合时刻,vs1,vs2,…,vsn为传感器对应的数值类型数据,ps1,ps2,…,psn为传感器对应的数值类型数据的可信度。由于证据理论满足结合律,所以先计算前两个数据[5-7]。计算公式如下:

设rs1,rs2,rs12从大到小排序为rs1,rs2,rs12

3.4 参数更新
参数更新主要更新以下几个参数:单传感器的加速度、目标的加速度和传感器各属性的可信度。其中加速度的获取是通过两个信息报的速度和方向计算得到的。
传感器属性数据的可信度是通过数据的方差大小、单传感器融合结果与最终融合结果的一致性共同决定。传感器的状态数据的可信度也是通过最终融合结果的一致性共同决定的。
4 仿真结果
实验模拟三个目标的数据,其中T1做的是变速运动、T2做的是匀速直线运动、T3做的是匀速圆周运动。由于图3中坐标比例的关系取T1单独分析。
图4是目标T1的融合对比图,图中方块是目标运动的真实轨迹,菱形是原始数据,三角形是融合后的目标轨迹。目标1首先从静止状态做变方向加速运动,接着变方向匀速运动,最后进行变方向减速运动达到静止状态。
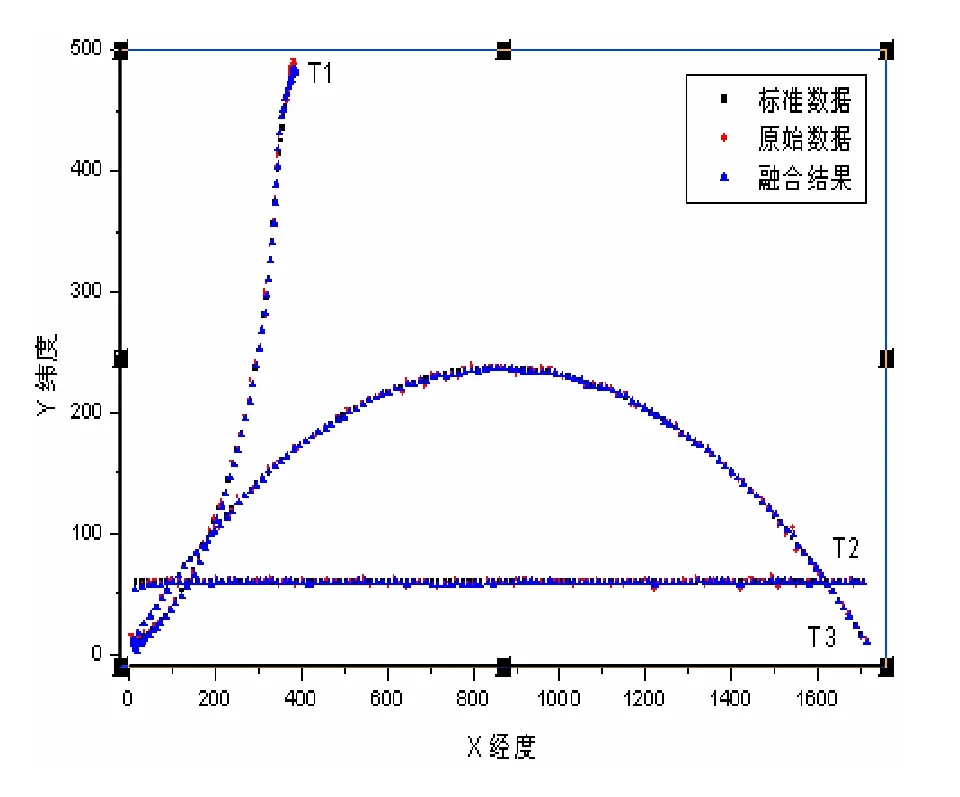
图3 目标的运动轨迹
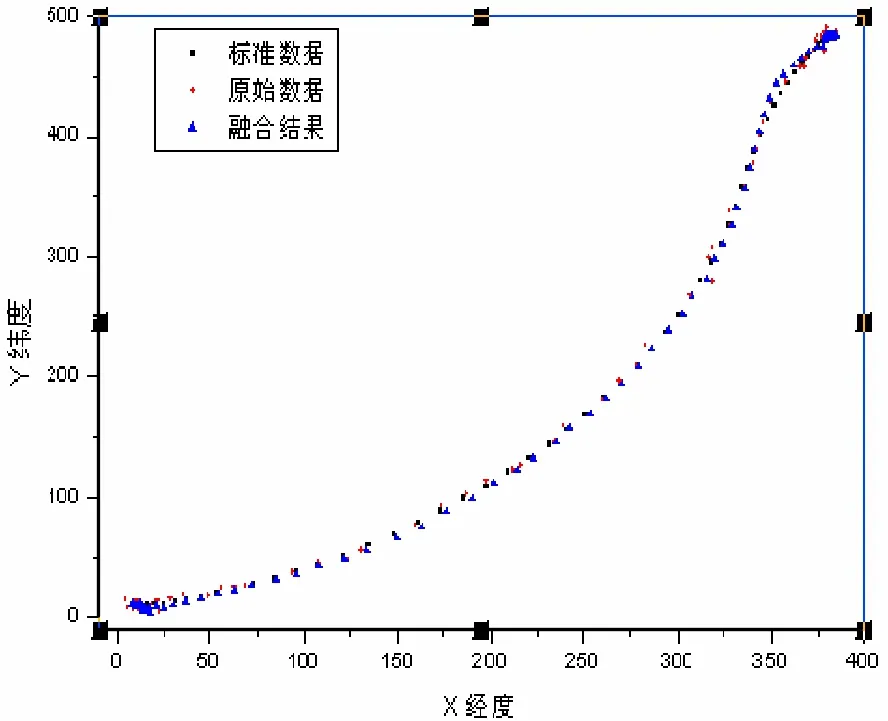
图4 T1的运动轨迹
从图4可以直观地看出,目标在横轴(150,250)和(350,375)之间,即转弯的时候融合结果的位置偏向与所转方向相反的一侧。这主要是由于预测算法的误差导致的,其他时间点的数据更接近真实值。
通过统计可知,原始数据经度和维度平均的偏离为2.26而融合后的平均偏离在1.5左右。融合对位置准确度的提升有一定的效果。
图5和图6是对数据的属性信息进行融合,上半部分是原始数据,下半部分是融合结果,可以很明显的看出融合后属性信息的稳定性提高,误差降低。
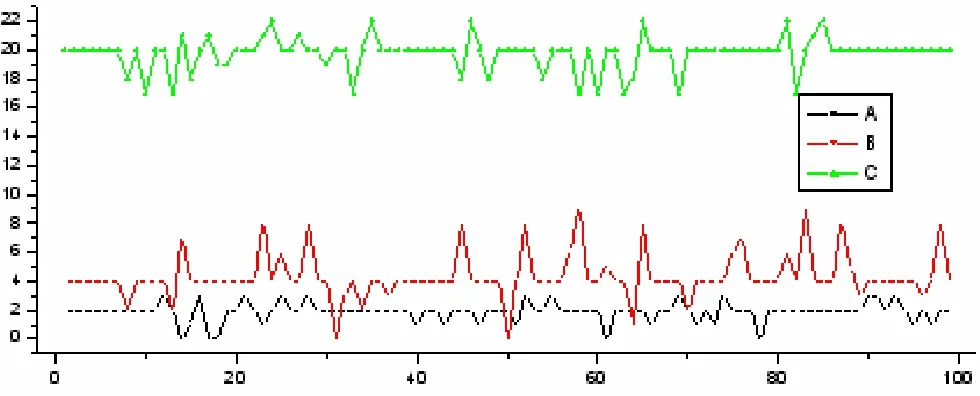
图5 T1属性信息融合前
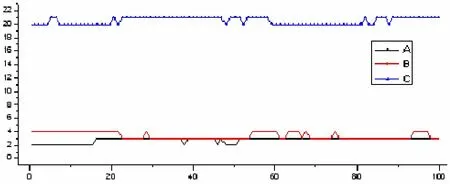
图6 T1属性信息融合后
5 结语
本融合系统在处理多源数据融合的问题过程如下:首先采用时间调整进行数据的准备;其次利用位置、速度和方向三个特征量来进行目标关联;最后使用DSMT等算法进行关联后数据的融合处理。实验验证了该方法可有效的降低了目标运动状态数据的波动性,提高了目标属性信息的稳定性。但是属性信息的融合结果还是出现波动,状态数据在方向变化时还是存在一定的误差。各个环节还有待进一步的研究,以提高融合系统整体性能。
[1] 陈小惠,万德钧,王庆.分布式多传感器多目标融合算法综述[J].火力与指挥控制,2003,28(03):1-5.
[2] 何友,王国宏,陆大金,等.多传感器信息融合及应用[M].北京:电子工业出版社,2000:287-297.
[3] 康耀红.数据融合理论与应用[M].西安:西安电子科技大学出版社,1997.
[4] 刘斌,杨俊安,陈开.一种基于数据融合的合作频谱感知技术[J].通信技术,2008,41(11):23-25.
[5] YAGER R R. A Framework for Multi-source Data Fusion[J].Information Sciences,2004(163):175-200.
[6] 韩静,陶云刚.基于D-S证据理论和模糊数学的多传感器数据融合算法[J].仪器仪表学报,2000,21(06):644-647.
[7] 胡丽芳,关欣,何友.基于DSmT的多传感器目标识别[J].弹箭与制导学报,2008,28(02):186-188.