基于ARM9的足球机器人底层控制系统的设计
2010-09-11李小光吴茜琼
李小光,吴茜琼
基于ARM9的足球机器人底层控制系统的设计
李小光,吴茜琼
(洛阳理工学院电气工程与自动化系,河南洛阳471003)
设计了一种基于32位ARM处理器S3C2440和嵌入操作系统UC/OS-II的足球机器人底层控制系统.重点介绍了以S3C2440为核心的控制系统组成,基于LM629的位置闭环单元,基于L298的功率放大模块和嵌入操作系统UC/OS-II的软件设计策略.实验结果表明,系统具有比较高的精度和稳定性,系统设计合理、可行.
足球机器人;控制系统;ARM;LM629
RoboCup[1](Robot World Cup)是一个以足球比赛为形式,通过比赛测试新技术从而促进人工智能、机器人技术以及相关领域发展的项目,同时它也为机器人硬件、软件技术的研究提供了广阔平台.凡参加“世界杯”机器人足球比赛的球队都是体表自己国家的综合实力参加比赛的,因此可以说“世界杯”机器人足球比赛是衡量各国综合技术实力一个小平台上的“技术战争”.
足球机器人底层控制系统[2]作为执行结构,其性能的好坏在一定程度上决定了比赛的胜负,它直接影响到整个机器人运动的精度、灵活性乃至整个系统的可靠性.目前国内外的足球机器人个体智能性不高,不能很好地满足机器人控制系统的需要.因此,开发一种高性能的机器人小车底层控制系统成为足球机器人爱好者的迫切需求.
本文设计了全新的基于ARM9[3]的全自主式足球机器人底层控制系统.该控制系统采用S3C2440芯片,CPU频率可达400 MHz,提高了其自主行为和决断自主权,使得足球机器人能够根据场上的形势做出更合理、更快的反应.采用LM629来构成伺服控制系统位置闭环,设计了L298的功率放大模块,还嵌入了UC/OS-II操作系统以提升其稳定性,并降低功耗.
1 底层控制系统的整体设计方案
底层控制系统的设计一般由5个阶段构成:需求分析、体系结构设计、硬件/软件设计、系统集成和系统测试.各个阶段之间往往需要不断的反复修改直至完成最终设计目标.
本设计方案采用 ARM920T内核设计的S3C2440[4]芯片作为主控芯片,电机伺服控制采用LM629,功率放大采用L298,又安装有红外、压力传感器;此外还采用了可扩展无线通信模块和视频采集模块.其整体设计方案见图1.
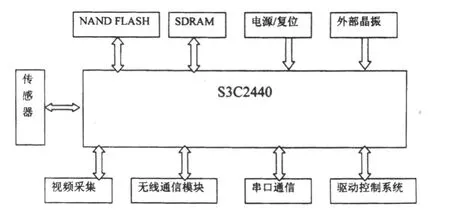
图1 底层控制系统的整体设计方案
2 底层控制系统的硬件设计
2.1 主处理器
主处理器选用三星公司所生产的S3C2440[4]微处理器.该产品是为手持设备和常用的低功耗、高性能应用方案提供的小尺寸微处理器,采用ARM920T内核,标准0.13μm COMS封装,内置内存编译器.它的低耗电量、精简、高雅和全静态设计特别适用于低廉、功耗敏感的应用设备.此外,其总线结构采用最新的AMBA结构,S3C2440还提供了杰出的 CPU性能:一个由Advanced RISC Machine,Ltd 公司设计的 16/32- bit的ARM920T RISC处理器.ARM920T内核包含MMU单元、AMBA总线和一个由各为8字长的16KB指令缓冲和16KB数据缓冲的哈弗结构的缓冲单元.
2.2 伺服控制模块
在该模块中采用National Semiconductor公司生产的智能化专业控制芯片LM629[5]来构成伺服控制系统[6]的位置闭环,它适用于有正交增量式光电编码器提供位置反馈的交直流伺服控制系统,能完成高性能数字运动控制中的实时计算工作,可以方便地与桥式功率放大电路构成位置闭环系统.
LM629连线很简单,它的数据总线与S3C2440芯片的通信包括:输入运动参数和控制参数,输出状态信息,PWM的输出信号连接到H桥驱动器L298.直流电机的反馈采用增量式编码器,编码器的A,B两相正交信号经LM629内部电路完成4倍频.C相信号是电机每转一圈产生的脉冲信号,用于电机的精确回零.LM629应用框图如图2所示.
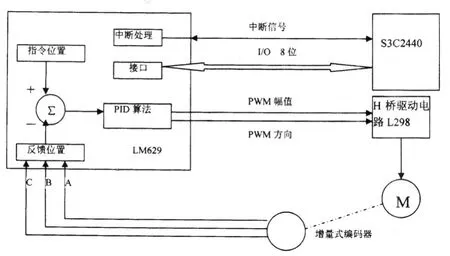
图2 LM629应用框图
2.3 功率放大模块
本设计方案采用了 ST微电子小组生产的L298芯片.该芯片采用双 H桥驱动器.H桥可承受最高电压为46 V,相位电流可达2.5 A,可驱动感性负载,支持最大PWM频率为50 kHz,逻辑供电为5 V,功放级电压为5~46 V.下管的发射极单独引出,以便接入电阻,形成传感器信号.
2.4 电源电路设计
由上述 S3C2440芯片电压供电特点可知, S3C2440内部供电电压为1.2 V,外部I/O供电电压为3.3 V.这里选用LM1117-18芯片提供1.25 V电压,选用LM1117-33芯片提供3.3 V电压.它们的特点是,输出电流大,精度高,稳定性高,功耗低.因外部电压为12 V,所以采用LM2567芯片将12 V转换为5 V电压.
2.5 复位电路设计
由于ARM高速、低功耗、低工作电压导致其噪声容限低,这是对数字电路极限的挑战,对电源的纹波、瞬态响应性能、时钟源的稳定度、电源监控可靠性等诸多方面也提出了更高的要求.本设计方案采用74HC14进行驱动的RESET,nRESET可由上位机复位,进行J TAG调试.复位电路设计如图3所示.
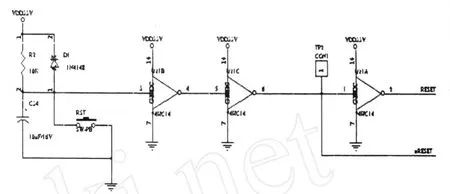
图3 复位电路设计
3 底层控制系统的软件设计
系统软件主要包括主程序模块和中断服务子程序模块.主程序模块完成系统的初始化和中断的设置;中断服务程序是软件的主体,完成系统的控制功能.
3.1 初始化程序设计
为了使足球机器人进入良好的工作状态并运行,良好的初始化程序是完成各个任务的保障.该初始化流程图如图4所示.
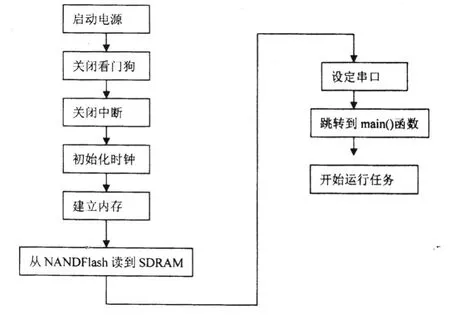
图4 初始化流程图
3.2 关闭中断
在系统进入正常工作以前要关闭中断.中断屏蔽寄存器MASK和SUSMASK的寄存器地址分别为“IN TMASK=0x4A0000008”和“INTSUBMASK=0x4A00001C”.将寄存器各个位置“1”屏蔽中断,其程序如下:
@disable all interrupts
3.3 初始化系统时钟
外部提供的12 MHz晶振,经分频可高达400 MHz,以供外围设备使用.S3C2440内部时钟逻辑控制可提供CPU的FCL K时钟、内部总线AHP和APB的HCL K与PCL K时钟.因此,在外围设备正常工作以前,必须先初始化好所需的时钟.其具体程序设定如下:
3.4 UC/OS-II的移植
因大部分的UC/OS-II[6]代码使用ANSI C语言,因此UC/OS-II的可移植性很好.但仍需要使用C和汇编语言写一些处理器相关代码.进行UC/OS-II移植只需修改OS-CPU.H,OS-CPUC.C,OS-CPU-A.ASM 3个文件即可.
4 系统测试及结果分析
在测试中,设计了两个标志来观察机器人运行的平稳性(带有旗标的刚性钢丝)和速度调控的平稳性(带有橡皮的刚性钢丝).小车运动时,如果旗标摆动小,可知运动平稳.如果小车在检测到目标并靠近然后停止时,橡皮标志前后摆动小,可知机器人对于速度的控制较为平稳.
机器人在最大功率运行过程中,从旗标抖动情况来看,运行较平稳,没有发现偏差现象.在机器人从搜索到目标到接近目标时,橡皮标志始终保持一种较小且平稳的摆动,由此可见机器人速度控制准、定位精确.
5 结语
本文采用S3C2440芯片、LM629的伺服模块、基于L298的功率放大模块,并移植了UC/OS-II操作系统对足球机器人底层控制系统进行了设计.本设计方案简化了软硬件设计,较好地解决了复杂运算算法的瓶颈问题;具有较高的速度控制精度,动态品质优良;实现了智能PID自适应控制;还可方便地进行功能的扩展.实验表明,该系统具有比较高的精度和稳定性,系统设计是合理、可行的.
[1]HIROKIK,MINORUA,YASUOK,et al.RoboCup:a challenge problem for AI and robotics.[C]//HirokiK. RoboCup-97:RobotSoccerWorld Cup.Berlin: Springer,1998:38-43
[2]马英庆.足球机器人底层自动控制系统硬件[J].现代电子技术,2007(13):118-120.
[3]ARM Limited.ARM9Technical Reference Manual (Rev4)[EB/OL].[2009-10-21].http://www.arm. com/pdfs/ARM9-familiy-flyer-34-5.pdf.
[4]邓俊华.基于S3C2410处理器的Linux移植[J].微型电脑应用,2009,25(8):53-55.
[5]宗光华.机器人的创意设计与实践[M].北京:北京航空航天大学出版社,2004:46-97.
[6]肖海荣.一种教学机器人控制系统的设计与实现[J].机电一体化,2006(5):40-43
Design of a soccer robot control system based on ARM9
LI Xiaoguang,WU Qianqiong
(Luoyang Institute of Science and Technology,Luoyang 471003,China)
A soccer robot control system based on ARM9 processor and a embedded operating system UC/OS-II were introduced.This system includes a core controller based on S3C2440,a position loop based on LM629,an amplifier based on L298,and software strategy based on UC/OS-II.The experiment results showed that the system has high accuracy and stability,the design of the system is feasibility and rationality.
Soccer Robot;Control System;ARM;LM629
TP242
A
1671-9476(2010)05-0057-03
2010-06-07
李小光(1983-),男,河南商水人,助教,在职研究生,主要从事信号与信息处理.
