加工中心龙门磁悬浮高度的滑模控制*
2010-09-11王丽梅安明伟刘春芳
王丽梅 安明伟 刘春芳
(沈阳工业大学电气工程学院,辽宁沈阳 110023)
加工中心龙门磁悬浮高度的滑模控制*
王丽梅 安明伟 刘春芳
(沈阳工业大学电气工程学院,辽宁沈阳 110023)
针对龙门加工中心中的移动横梁,提出了采用磁悬浮技术,实现无摩擦驱动的新型控制方案。根据所建立的横梁磁悬浮系统的数学模型,应用基于微分几何的反馈线性化方法将非线性的电磁悬浮系统转化为线性系统,然后利用积分滑模控制器来对整个系统进行鲁棒控制。仿真研究结果表明,与传统控制方法相比,系统具有很强的抗扰性和较高的刚度,横梁能够实现无摩擦稳定悬浮。
磁悬浮系统;非线性控制;反馈线性化;滑模变结构
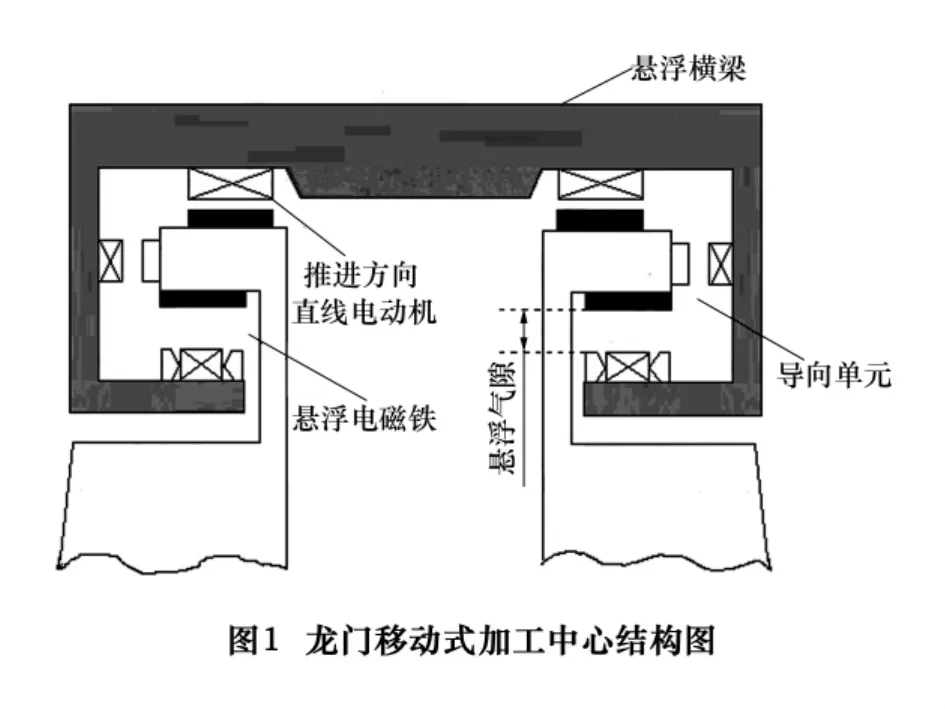
随着现代控制理论和电子技术的发展,对磁悬浮技术的研究已经进入了一个新的时代。磁悬浮列车和磁悬浮平台等技术都已成功应用磁悬浮原理,而将磁悬浮技术应用于加工中心的研究还很少。在传统的龙门移动式加工中心中,移动部件和静止导轨之间存在着摩擦,限制了机床精度的提高。由于高精度加工技术的发展,应用磁悬浮技术以电磁铁和静止导轨之间产生的吸力为基础将龙门加工中心的横梁悬浮在静止导轨上方,同时采用永磁直线电动机进行推进驱动即能够实现高精度定位,如图1所示。
本文采用反馈线性化的方法对模型进行线性简化,建立的模型是以电压作为输入控制量的三阶系统。反馈线性化是一种全局线性化方法,它不受平衡点选取的制约,在线性化过程中没有忽略掉任何非线性项,可以保证系统的全局稳定。机床的悬浮横梁在实际运行中,要受到或弱或强的外界干扰的影响,且由于所建模型的不确定性,控制对象参数选择的误差以及测量误差等也都将对系统形成干扰。针对这个问题设计了积分滑模控制器,抑制各种干扰。滑模变结构控制的最大优点是系统一旦进入滑模区,系统状态就不再受到参数变化和外界扰动的影响,具有完全的自适应性和鲁棒性。而且控制器中存在积分环节,可以用来消除稳态误差,提高整个控制系统的精度。
1 单电磁悬浮系统模型及线性化方法
1.1 数学模型
龙门移动式横梁两端垂直同步悬浮,除了要求悬浮的高刚度以外,还要保证悬浮的同步性、稳定性和精确性。这里只对单电磁悬浮系统给予控制,保证悬浮的精确度和稳定性。电磁铁结构如图2所示,上端为导轨,下面是电磁铁绕有通电线圈。
假设系统忽略漏磁通,忽略电磁铁和导轨中的电阻,认为磁势均匀降在气隙上,并且认为电磁铁只在垂直方向上有运动。单电磁铁的数学模型为


式中,δ(t)为悬浮间隙;F(i,δ)为电磁吸力;m为悬浮横梁的质量,fd(t)为干扰;i(t)为控制线圈的电流;u(t)为控制线圈两端的电压;μ0=4π×10-7为真空磁导率;A为铁心面积;N为电磁铁绕组匝数。
1.2 反馈线性化方法
选取x=[x1x2x3]=[δ˙δi]T作为状态变量并设k=μ0N2A/4,选择输出y=δ=x1,可得系统的非线性状态空间方程为

那么非线性状态空间方程(4)可以写为
选取反馈规律:u=α(x)+β(x)v

设线性状态变量为z=[z1z2z3],则得到线性化后的状态变量与原系统的状态变量之间的转换关系:
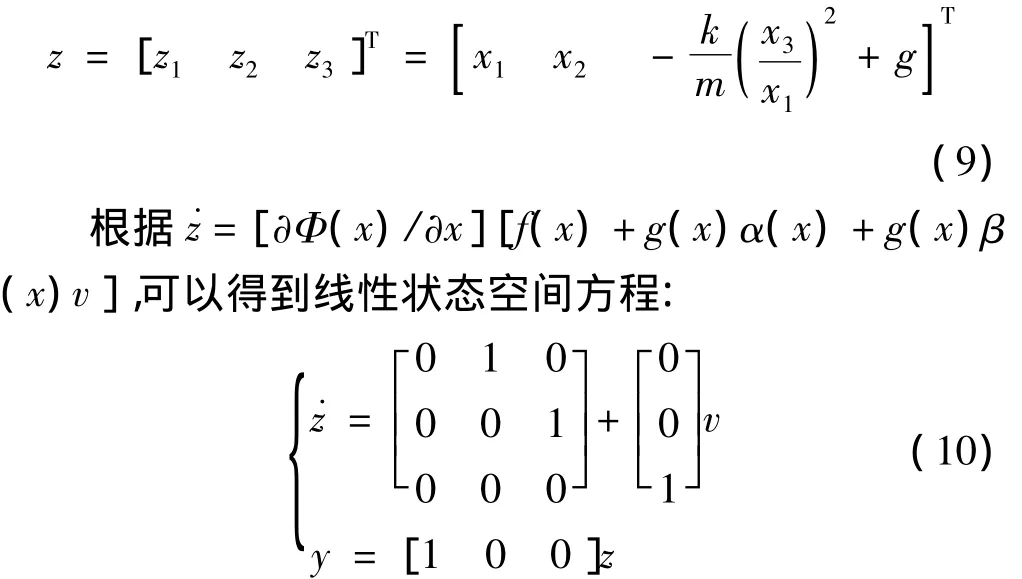
电压控制模型主要是将原系统模型转化成为三阶线性系统,大大的简化了系统模型。电压控制模型是通过控制电压来实现对磁悬浮力的控制。图3表示线性化后的系统开环结构图。

2 积分滑模控制器的设计
滑模变结构响应快,对系统参数和外部干扰呈不变性,可保证系统是渐进稳定的。尤其算法简单,易于工程实现。其缺点是存在抖动和需知不确定参数的上下界等问题。
滑模变结构控制可分为两个阶段:首先是确保系统运动在有限时间内从任意初态到达滑模面;其次是系统在控制律的作用下保持滑模运动。滑模控制器的设计分为两步:选择切换函数并确定其系数,使滑动模态渐进稳定且有良好的品质;确定变结构控制律,满足到达条件,形成滑动模态区。由此,切换函数和变结构控制率两部分组成了滑模变结构控制的核心。
首先设计切换函数,根据系统所期望的动态特性来设计切换面,使得所设计的控制器有良好的控制性能,以便在非滑模区的系统状态能够快速稳定地到达滑模面。切换函数的设计有很多种,本文中采用了极点配置法。
假设参考悬浮系统实际输出的悬浮气隙为y,期望输出的悬浮气隙为yd。定义悬浮位置误差为e,且

其中,c0、c1和c2为滑模面系数,是三个正常数,表示各项在控制器中的权重。
当系统进行滑模运动时,满足:


veq称为等效控制,能够保证滑动模态存在,即它是强迫系统沿切换面运动所需的控制力。
将式(10)代入式(13),得到:

当系统存在外部扰动或不确定性时,等效控制不能实现系统的鲁棒性,需要加入切换控制vs。为了实现滑模运动,要求系统必须满足能达条件:s˙s≤0。
用李亚普诺夫法进行验证。构建李亚普诺夫函数:

此函数是半正定的,要求其导数˙V=s˙s≤0,便可以满足能达条件。选取指数趋近率:

其中ε和λ是正常数。
符号函数定义为

则将式(17)代入V的导数˙V=-s[εsgn(s)+λs]≤0中,满足到达条件。
根据式(13)和(17)相等,得出:

其中,vs= -εsgn(s)-λs。
等效控制与切换控制共同组成了滑模变结构控制的控制率,滑模变结构控制率由两部分组成veq和vs。
3 仿真
为了实现机床高加工精度的目标,将横梁悬浮起来,要求所设计的滑模控制器能够使横梁稳定地悬浮在2 mm处,并在有扰动影响的情况下具有很强的鲁棒性。根据上面所设计的控制器,利用MATLAB/Simulink进行仿真。系统参数见表1。

表1 系统参数
在仿真过程中,系统的稳定性和滑模面及控制率中的参数有密切的关系,要选取适当的k和ε,才能达到较好的控制效果。图4是滑模面和滑模运动的曲线图。当k=40,ε=5时,滑模面s=0以及系统到达滑模面和在面上的运动曲线。

当系统加入脉冲扰动时,输出响应如图5所示。在0.3 s时加入扰动后,悬浮气隙和悬浮位置误差产生振荡,在0.1 s内又恢复稳定,具有很强的鲁棒性。
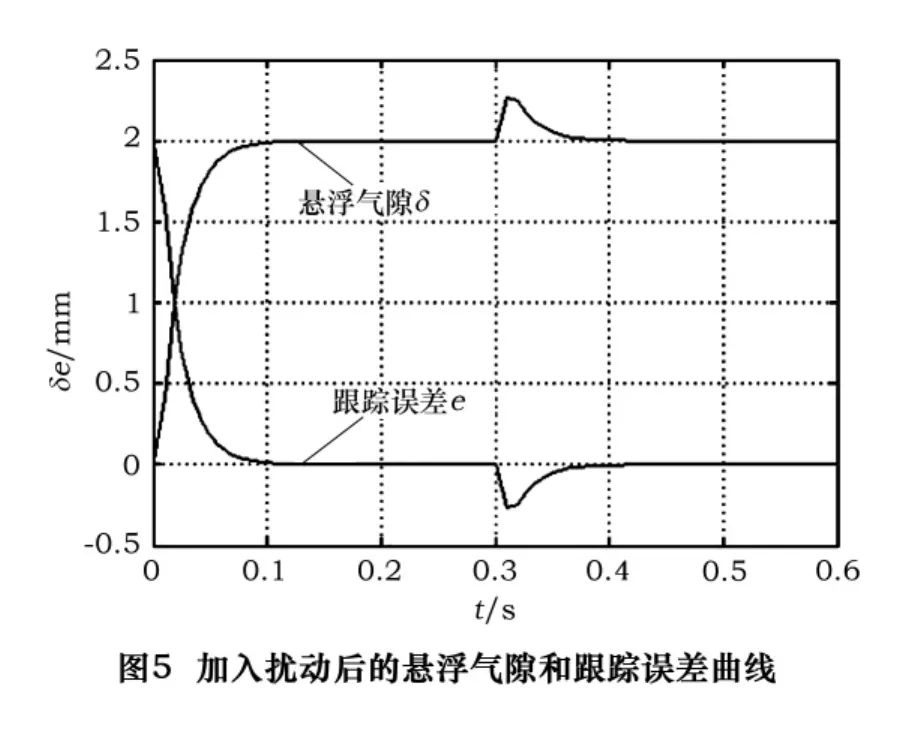

图6是将积分滑模控制与传统的状态反馈控制方法进行了比较。图6a为悬浮气隙的输出,从图中可以看到,积分滑模控制器的快速性比传统控制器要好,超调小,精度高,扰动引起的振荡小,调节时间短。而传统控制器虽然能够消除扰动对系统产生的影响,振荡后也可以恢复到给定值,但是振荡时间要长。图6b是控制电流的输出曲线,同样在0.25 s时加入的脉冲扰动使得电流产生了很大的振荡。
滑模变结构控制可保证系统稳定,是一种鲁棒性强,稳定性好,超调小,响应速度快的控制方法。滑模控制对被控对象的数学模型不作精确的要求,在一定的范围内参数的摄动不会给系统带来影响,并能有效地抑制外加干扰。
4 结语
本文在龙门移动式加工中心中引入了磁悬浮技术,彻底消除了摩擦,并采用了基于反馈线性化的滑模变结构控制方法对磁悬浮系统进行控制,悬浮横梁可以平稳地上浮,且在较短时间内达到平衡。与传统的状态反馈方法相比,无超调,响应速度快且能够有效地抑制干扰。系统的参数变化以及添加的外部扰动对输出的影响不大,即系统具有较强的鲁棒性。
1 杨霞,李强,郭庆鼎.基于数控机床进给用磁悬浮直线电机摩擦的消除[J].组合机床与自动化加工技术,2005(7):41~42
2 Jinunshian Phuah,Jianming Lu.Chattering Free Sliding Mode Control in Magnetic Levitation System[J].IEEJ Trans EIS,2005,125(4):600-605
3 王丽梅,石佳.基于反馈线性化的龙门数控机床磁悬浮系统滑模鲁棒控制[J].机床与液压,2008,36(5):254~256
4 王军闯.NC机床磁悬浮进给机构研究[D]:[学位论文].大连:大连交通大学.2006.
5 龙志强,洪华杰,周晓兵.磁悬浮列车的非线性控制问题研究[J].控制理论与应用,2003,20(3):399~402
6 ChoiK B,ChoY G,Shin shiT.Stabilization of one degree-of-freedom control type levitation table with permanent magnet repulsive forces[J].Mechatronics,2003,13(6):587-603
7 LIU DE - sheng,LI Jie,ZHANG Kun,The Design of the Nonlinear Suspension Controller for EMS Maglev Train Based on Feedback Linearization[J].Journal of National University of De Fense Technology,2005,27(2):96 -101
8 Jinunshian Phuah,Jianming Lu.Chattering Free Sliding Mode Control in Magnetic Levitation System[J].IEEJ Trans.EIS,2005,125(4):600 -605
联系作者:刘春芳,女,1975年生,副教授,博士,研究方向:伺服系统、鲁棒控制及计算机仿真。
(编辑 余 捷)
如果您想发表对本文的看法,请将文章编号填入读者意见调查表中的相应位置。
Sliding Mode Control of Magnetic Levitation Used in Gantry Machine Tool
WANG Limei,AN Mingwei,LIU Chunfang
(School of Electrical Engineering,Shenyang University of Technology,Shenyang 110023,CHN)
This paper adopts magnetic levitation technology for the moving crossbeam of the gantry NC machine tool in order to achieve non-friction control.Based on the mathematical model of the maglev system,the nonlinear model can be transferred into linear model by using feedback linearization method.Then the robustness of the entire system is implemented according to the integral sliding mode controller.The results of simulation show the system has powerful ability of suppressing disturbance and high rigidity which is superior to the traditional control method.The crossbeam can achieve steady levitation.
Magnetic Levitation System;Nonlinear Control;Feedback Linearization;Sliding Mode Variable Structure Control
TP273
A
* 国家自然科学基金项目(50805098)
2009―06―08)
10215
