基于舒适性分析的踏板装置操纵过程数字化描述
2010-09-03刘明周胡金鑫蒋增强
扈 静, 刘明周, 胡金鑫, 蒋增强
(合肥工业大学机械与汽车工程学院,安徽合肥 230009)
随着“以人为本”理念在制造业的日益深化,踏板装置作为与操作者接触最为密切的一类操纵装置,其舒适性问题更应引起设计人员的关注。针对各类操纵装置舒适性评价与分析问题,国内外学者进行了相关的研究[1-9]。但是,各种研究成果主要立足于模糊分析、主观评价及试验验证3个方面,无法实现装置舒适性评价以及反馈过程中信息的量化描述,从而造成评价环节缺乏数据支持、反馈环节信息模糊等问题。因此,本文以“人员-装置”进行人机交互的操纵过程为研究对象,分析人体舒适感产生机理,利用人体各项物理指数与踏板装置相应设计参数的映射关系反映踏板装置的舒适性程度,提出踏板装置舒适性定义的量化表达方式;建立基于舒适性分析的踏板装置操纵过程动作元描述模型,对踏板操纵过程的本质特征进行数字化描述。
1 踏板装置舒适性概念的描述
所谓踏板装置的舒适性,是指在一定的时间段内,由人员与踏板装置所构成的人机系统发生状态转移时,装置所反映出来的、平衡系统中各类负反馈并使系统达到良性行为水平的一种品质。根据人机交互分析,在操纵过程中人体舒适度产生机理如图1所示。
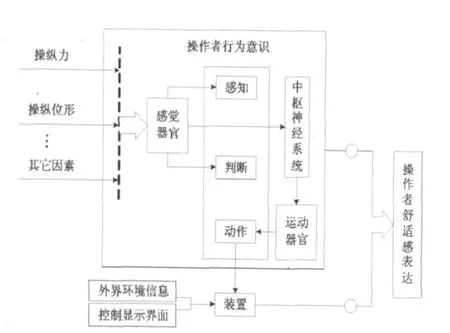
图1 操纵过程人体舒适度产生机理
在操纵踏板装置的过程中,首先是操作环境、预定的作业任务以及装置运行状况等外界信息,通过操作者的视觉、听觉和触觉等感觉器官传入操作者的大脑,操作人员根据其操纵经验予以加工后,做出相应的判断和决策,然后通过足部等运动器官发出运动、施力或抬起等指令,从而改变踏板装置运行状态。踏板装置所处的、对操作者具有感觉影响的外界环境信息以及各种控制显示界面信息,通过上述过程反馈给操作人员,同时操作人员仍在不断接受外界环境信息、任务信息以及踏板装置的状态信息,调节自身操纵状态以适应新的操纵环境信息,确保整个人机系统的状态在可控范围内变化。依据对人员行为的S-O-R经典模式的拓展,操作者对踏板装置的操纵行为可以分成3个阶段,即感知阶段、判断决策阶段和操作阶段。
(1)感知阶段。操作人员通过视觉、听觉和触觉感知装置的运行环境条件,如任务完成状况、装置运转状况等信息,该阶段主要由感觉器官完成。
(2)判断决策阶段。操作人员在感知信息的基础上,结合操纵经验和技能,经过分析、做出判断,确定有利于装置稳定运行或任务完成的措施,该阶段主要由中枢神经系统来完成。
(3)操纵阶段。操作人员依据判断决策所做出的实际反应和行动,具体指人员对装置实施的控制,如踏压等,该阶段主要由运动器官来完成。

通过上述分析以及对踏板装置舒适性概念的表述,定义踏板装置的舒适性程度为:其中,ρ为踏板装置的舒适性程度;C为系统处于良性工作状态下外界物理参数与人体相应参数的映射关系;A(i)为外界环境因素集合,A(i)=[x1,x2,x3,…,xn];B(i)为人体本身对应参数集,B(i)=[y1,y2,y3,…,yn];Ci(xi,yi)为单项因素影响规律;βi为该项因素在综合影响中的权重。
(1)式的意义是:踏板装置的舒适性是由装置本身设计所决定的各类物理属性作用于人体时,与人体相应参数的相互适宜程度所决定,总体舒适性程度是各单项属性因素引起的舒适性程度在操作过程时间累积效应消除后的加权和。
2 操纵动作的分类
人机交互过程中,踏板装置是指通过人的足部动作(直接或间接)来使机器启动、停车或改变运行状态的各种部件、机构以及它们的组合等环节。其基本功能是把操作者的响应输出转换成机器设备的输入信息,进而改变或控制机器设备的运行状态。根据舒适性研究要求,按人体操作关注度的不同,操纵动作可分为无意识、关注型2大类,在分析时前者不需考虑意识活动的时间,而后者则需顾及足部运动前意识活动对操纵过程产生的时间影响;根据所用肢体部位的不同,将足部操纵动作划分为3种基本类型:
(1)轻踏式。包含脚部、踝部动作,重点在脚掌的接触行为,踝部动作为辅助行为。
(2)轻压式。包含脚部、踝部动作,重点在踝部的下压行为,脚部动作为辅助行为。
(3)深踏式。包含脚部、踝部、下肢动作,重点在下肢用力后脚掌的接触行为。
当操作者操纵踏板装置时,踏板装置所反映的舒适性通过操纵过程作用于操作者并由操作者表现出舒适感觉的程度。因此,在研究踏板装置舒适性时,从操作者的运动过程进行分析,研究装置在人体运动过程中对人体感觉的影响,从而对该装置的舒适性进行分析。但操作者的运动过程是一套连续的、随机的动态过程,由于操作者和装置构成的人机系统的状态是不断转移的,因此可利用微分的思想,将操纵过程进行分解,以可测的、可进行定量分析的“微元”描述这一动态过程,下面引入动作元的概念以描述该过程。
3 基于动作元的操纵过程数字化描述
3.1 动作元概念模型及描述
装置在被操纵的过程中,其各个设计因素,如反馈力、高度及操纵点间距等,均通过操纵过程作用于人体,使人体的感觉产生变化,通过这一作用过程展开装置的舒适性研究。根据预定动作时间标准法中的MOD研究,人在操纵过程中的动作均可归纳为21种基本动作,通过MOD法对操纵过程的分解、组合以及属性描述,定义动作元。
定义 动作元是指人在改变外界客体运动状态时,所产生的主体运动过程中具有相同动作类别及物理意义的基本动作的集合。
一个动作元可以是1个或多个基本动作的集合,但其包含的基本动作必须具有相同的人体运动特征和物理属性描述。根据操纵动作基本类型的划分以及人体动作特征分析,假设某段考察期内的操纵过程由m个动作元组成,则设定如下四元复合组构建动作元概念模型为:

其中,Mk为第k个动作元,k∈(1,m);nk为第k个动作元中的属性类数;λk为第k个动作元的时间约束系数;{ωBiBi}k为第k个动作元的基本属性集;{ωSjSj}k为第k个动作元的辅助属性集;Bi为动作元第i个基本属性;Sj为动作元第j个辅助属性;ωBi为第i个基本属性权重系数;ωSj为第j个辅助属性权重系数。
3.2 动作元时间约束的确定方法
人员在进行操纵作业时,很多情况下都具有重复性、周期性,同时人的体感是具有时间累积效应的,即使是满足舒适性要求的装置,人在进行了一段时间的操纵作业后,也会因为时间累积效应造成的身体能量消耗而感觉不适;因此研究踏板装置的舒适性时,需要将这种重复操作以及时间累积效应弱化或消除,客观地对踏板装置舒适性进行评价与分析。选取利用踏板装置完成某种操纵目的所需的时间为所要研究的时间区域,以该时间区域内操作者使用的所有基本动作的集合作为研究该装置舒适性时所要考察的操纵过程,利用动作元将操纵过程进行分解;由于操纵过程中的动作元组合是一种动态变化的过程,各类动作元以一定的概率在各种操纵状态之间动态转移,这一概率在整个操纵过程中是确定不变的,因此通过计算动作元在操纵过程中的时间能力确定这一无量纲概率,作为操纵过程中各个动作元的时间约束λ,以达到近似消除时间累积效应的目的。
设所考察的操纵过程P[Ts,Te]中由MOD法记录的基本动作共有m个,经动作特征与物理属性一致性分析后组成n个动作元,其中,第k个动作元Mk中包含基本动作集合为∑X(g(k)),g(k)指第k个动作元中所有动作的MOD数之和,X是指基本动作的MOD类型,包括下肢和腰部动作以及相关附加因素动作,如目视、校正等;设操纵过程P[Ts,Te]中m个基本动作MOD数之和为 f(m),则第k个动作元Mk按其在操纵过程中的时间需求能力所确定的约束为:

其中,α(0)是无穷小余项,一般为0,本文作为 λk在一些特定情况下的修正量。
3.3 踏板装置舒适性影响因素权重配比方法
由于踏板装置以及装置完成的操纵任务的不同,各类设计因素在进行舒适性分析时所占的重要性程度是相异的,对于不同的实际情况,研究人员不能直接、主观地给出各因素的权重值;特征向量法具有累积优势度的特点,通过加权平均累积优势度向量的极限可以揭示因素重要性的序列信息[9],这与踏板装置舒适性研究的特点相符合,因此以操纵目的为标度,构造因素集的模糊互补判断矩阵,然后按照特征向量法求解判断矩阵的排序向量,从而获得因素权重集合 ω:{ωBi,ωSj}。
3.4 动作元属性权重集合的一致性修正
由于理想的判断矩阵应满足一致性条件,若上述方法模糊互补判断矩阵不满足一致性条件,同时由于踏板装置的舒适性判断不可避免存在一些主观性的影响,因此为保证判断矩阵排序的可信度和准确性,需要对判断质量进行一致性检验;互反判断矩阵一致性指标可以表示为:

检验互反判断矩阵的一致性比例为:

其中,RI为平均随机一致性指标,当CR<0.1时,表示相应的互反判断矩阵是一致性可接受的,由该矩阵得出的排序向量准确性是可以接受的。
从不同的角度可以给出修正模糊互补矩阵一致性的算法,一般有以下3种:
(1)每次迭代均对模糊互补矩阵进行全面修正的算法。
(2)每次迭代只对模糊互补矩阵的某一行及其相应的列进行修正的算法。
(3)每次迭代只对模糊互补矩阵中偏差最大的一对元素进行修正的算法。
以上算法均比较成熟,由于操纵过程具有时间累计作用,因此基于累积过程准确性的考虑,拟采用每次迭代均对模糊互补矩阵进行全面修正的算法。
3.5 踏板装置操纵过程数字化描述

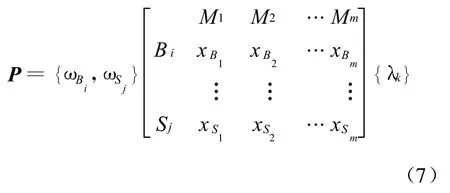
由动作元的概念模型,以上述方法确定的动作元约束分析和因素权重集为耦合系数,若某段操纵过程由m个动作元组成,则耦合后的动作元复合组描述操纵过程为:其中,P为某段操纵过程;n为动作元属性类数,i+j=n;λk、Mk、{ωBiBi}和{ωSjSj}意义见上述动作元概念模型引入部分。为方便后期数据分析,亦可用矩阵形式将(6)式进行分解,即其中,{ωBi,ωSj}是与踏板装置一一对应的动作元属性集的权重;{λk}是动作元在操纵过程中的时间约束;向量x是动作元矩阵Mk中每个动作元所对应的特征属性值。
4 实 例
结合上述方法,以描述某车型离合踏板的操纵过程为例进行描述。
选择该车在平顺路段行驶一段时间的过程为试验时间段P[Ts,Te],并选择对离合踏板舒适性影响较为明显的4个因素作为考察对象:踏板力、踏板行程、转动角度及踏板接触面,即{C1,C2,C3,C4},测定操纵过程P共包含5个动作元Mk(k=1,2,…,5),对应模特时间分别为:[F3,E2F3,F3,D3F3,F3],则相应动作元时间约束为:

通过上述权重配比方法计算后,4个属性Ci(i=1,2,3,4)的排序向量为:
ω=(0.4303,0.1799,0.2748,0.1150),一致性比例CR=0.00091<0.1,说明该配比结果具有一致性,是可接受的。
采用各类传感器以及相关测量仪器,测得动作元矩阵Mk中每个动作元所对应的特征属性值x1的基本数据集{xk},k=1,2,…,5。由于数据量较大,仅列示其中一组数据(包括踏板力与踏板行程),见表1所列。
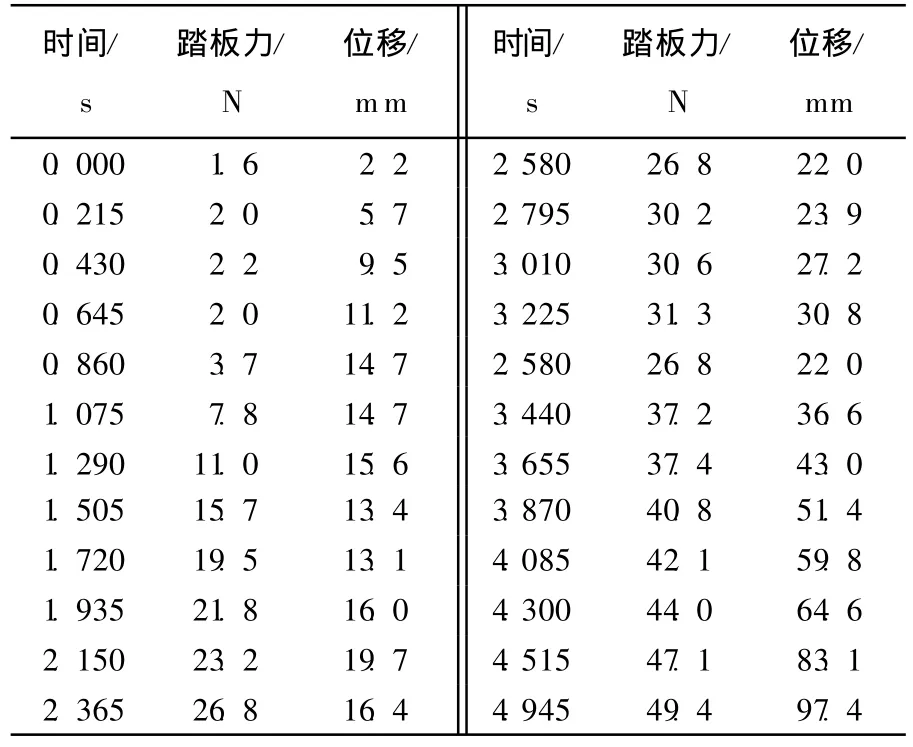
表1 输出数据表(节选)
通过上述基本数据的统计分析,选择每个动作元所含基本数据集合的特征值作为动作元所对应的特征属性值 x,为后期进行相关的舒适性评价、信息追踪等提供量化依据。
综上所述,所测某车型离合踏板的操纵过程经动作元耦合模型描述后为:
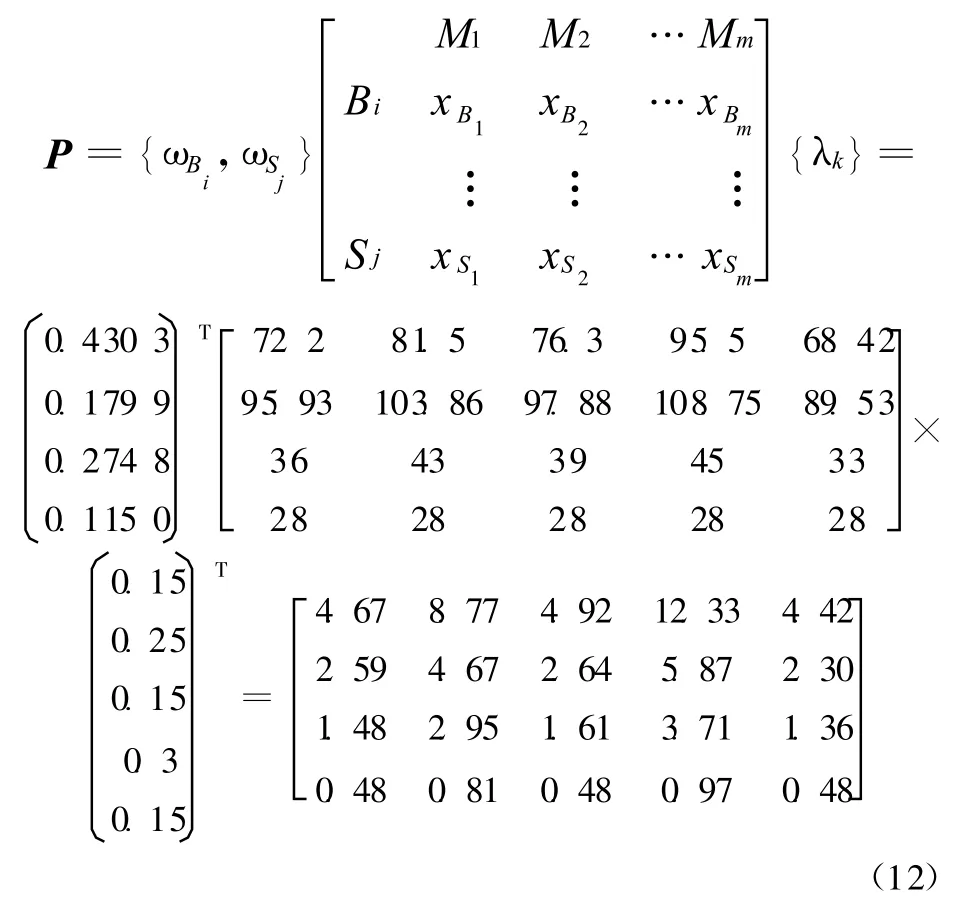
上述计算过程与一般矩阵运算不同,其中集合{ωBi,ωSj}与{λk}仅作为系数集合乘入动作元矩阵,并不对其产生矩阵运算中的乘积累加;同时,最终描述矩阵中各个特征属性值的量纲并不因计算而发生改变,这样通过动作元对操纵过程进行分解,而后再通过耦合运算,最终以复合矩阵实现了该操纵过程的数字化描述。该方法为评价踏板装置的舒适性以及对其进行舒适性优化设计提供了一种非主观的、量化的解决方案。
5 结束语
本文针对识别外界环境影响人体舒适度的本质物理特征,提出了踏板装置舒适性的量化表达;建立了动作元概念模型,研究了动作元耦合机理,根据不同动作对操纵过程的时间能力分析以及属性权重配比,建立了动作元耦合机制,实现了踏板装置操纵过程的数字化描述,为后期踏板装置舒适性的评价与分析提供量化基础和理论支持。
[1]Hansona L,Wienholt W,Sperling L.A control handling comfort model based on fuzzy logics[J].International Journal of Industrial Ergonomics,2003,31(2):87-100.
[2]Wang Xuguang,Le Breton-Gadegbeku B,Buzou L.Biomechanical evaluation of the comfort of automobile clutch pedal operation[J].International Journal of Industrial Ergonomics,2004,34:209-221.
[3]K ong Yongku,Lowe B D.Optimal cylindrical handle diameter for grip force tasks[J].International Journal of Industrial Ergonomics,2005,35:495-507.
[4]Motamedzade M,Choobineh A,Mououdi A,et al.Ergonomic design of carpet weaving hand tools[J].International Journal of Industrial Ergonomics,2007,37:581-587.
[5]Toomingas A,Gavhed D.Workstation lay out and work postures at call centres in Sweden in relation to national law,EU-directives and ISO-standards,and to operators'comfo rt and symptoms[J].International Journal of Industrial Ergonomics,2008,38:1051-1061.
[6]杨晓明,邱清盈,潘双夏,等.基于 Hausdorff距离的摩托车制动器操纵舒适性优化设计方法[J].机械工程学报,2006,42(6):170-173.
[7]刘维平,谢成林,曹伟国,等.基于运动学分析的装甲车辆驾驶操纵舒适性研究[J].车辆与动力技术,2008,(3):20-23.
[8]何 源,扈 静,蒋增强,等.基于踏板力和力变率的离合器操纵舒适性评价[J].合肥工业大学学报:自然科学版,2010,33(1):10-13.
[9]徐泽水.不确定多属性决策方法及应用[M].北京:清华大学出版社,2004:38-59.
