侵彻硬目标识别技术中的机械滤波
2010-08-21石庚辰
张 兵,石庚辰
(北京理工大学机电学院,北京 100081)
0 引言
现代战争中,为了最大限度地破坏敌方深埋在钢甲、混凝土或岩石等硬目标下面的重要设施,要求弹丸必须侵入目标一定层数后爆炸[1-2],这就是硬目标识别技术。在侵彻硬目标识别中,常采用压电式或压阻式加速度传感器获取侵彻过载信号,经过1次、2次积分后可以得到侵彻的速度与深度[3-4]。但是,加速度传感器测得的信号中总是包含两种成分:弹体的刚体过载与弹体的振动响应,弹体的振动响应信号与刚体过载信号粘连在一起,给目标识别带来困难[5]。针对这一问题,本文提出了压电加速度传感器加滤波垫的机械滤波方法。
1 压电式加速度传感器原理
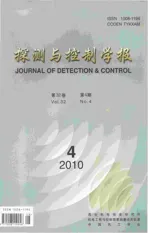
压电式加速度传感器是基于压电效应的原理设计的,可以将其看成是单自由度的振动系统。压电式加速度传感器的系统模型如图1所示[6]。
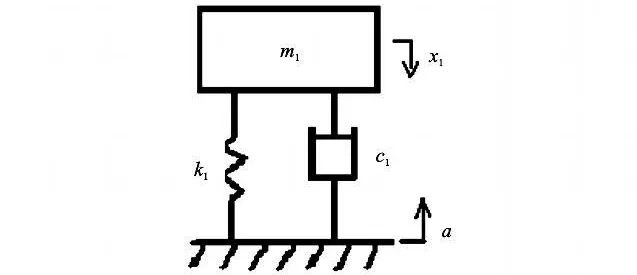
图1 传感器模型图Fig.1 Accelerometer model
系统的运动微分方程为

式(1)中,m1是模型的等效质量(kg);k1为等效刚度(N/m);c1为等效阻尼(N◦s/m);x1为m1的位移(m);a为输入加速度(m/s2)。
传感器的输出与位移x1成正比例,本文使用的压电传感器的幅频响应特性曲线如图2所示。

图2 传感器的幅频响应Fig.2 Amplitude-frequency response of accelerometer
从图中可以看出,该传感器的最高线性工作频率在20 kHz左右。-3 dB点对应的频率为75 k Hz;从滤波的角度来讲,该传感器可测量频率低于75 kHz的加速度信号。
2 加滤波垫后的机械滤波原理
传感器的前后两端均装有滤波垫,在弹内的安装方式见图3。滤波垫1起到对侵彻过载信号的滤波作用;后面的滤波垫主要是防止冲击结束后传感器反弹直接碰在后面压紧螺栓上,引起传感器输出振动信号,同时也可以起到机械滤波的作用。
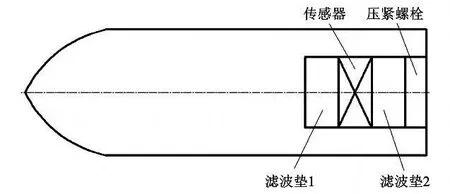
图3 滤波垫安装方式示意图Fig.3 Installation mode of filtering pad scheme
整个系统可简化为图4所示的物理模型[7-8]。其中,m2是传感器外壳的质量(kg);k2为滤波垫1的刚度(N/m);c2为滤波垫1的等效阻尼(N◦s/m);k3为滤波垫2的刚度(N/m);c3为滤波垫2的等效阻尼(N◦s/m);x1为m1的位移(m);x2为m2的位移(m);a为输入加速度(m/s2)。忽略滤波垫的质量。
图4 系统物理模型图Fig.4 System physical model
系统运动微分方程为:

式中,λ1与λ2分别是滤波垫1和2的预压量。
本文建立硬目标识别技术中机械滤波系统的分析假设为:1)滤波垫在测量过程中处于线弹性变形阶段;2)由于预紧力相对冲击惯性力很小且滤波垫1弹性恢复的时间相对滤波垫2滤波变形的时间较短,不计预紧力的影响,将两个滤波垫的初始状态看作不受压缩的自由状态。经后文发现,通过这样的假设得到的分析结果与实验结果是相吻合的。
基于上述假设,式(2)可化为:
该系统的初始速度与位移均为零,故式(3)表示的系统的初始条件为零,传感器的输出与∣x1-x2∣成正比例。以前后滤波材料均为刚度与阻尼比分别为2×106N/m与0.05 N◦s/m的天然橡胶为例,用MATLAB对系统进行了仿真分析,得到传感器输出信号的频响特性曲线如图5所示。
从图5中看出,-3 dB点对应的频率已从原来的75 k Hz降到3.4 k Hz。因此,加上滤波垫后相当于增加了截止频率为3.4 k Hz的低通滤波器。
当加速度的方向与图4所示的方向相反时,滤波垫2在整个测量过程中起到机械滤波的作用,截止频率为3.8 k Hz,其分析方法与滤波垫1相同。

图5 滤波后的传感器输出频响Fig.5 Frequency response of output signal af ter filtering
3 材料特性对滤波截止频率的影响
为了找到滤波材料的刚度与阻尼对-3 dB滤波截止频率的影响规律,用MATLAB进行了仿真分析。仍然以滤波垫1为例分析,材料特性对滤波垫2滤波时的影响与其相同。
图6是在材料阻尼不变的前提下,刚度对系统滤波截止频率的影响曲线。可以看出材料的刚度越大,滤波截止频率越大。

图6 刚度对截止频率的影响Fig.6 Influence of stiffness on cutoff frequency
图7 是在材料刚度不变的前提下,阻尼对系统滤波截止频率的影响曲线。可以看出材料的阻尼越大,滤波截止频率越大;同时,阻尼对滤波截止频率的影响程度小于刚度的影响。

图7 阻尼对截止频率的影响Fig.7 Influence of damping on cutoff frequency
4 冲击滤波实验
在弹丸侵彻目标的过程中,加速度传感器测得的信号中掺杂大量的结构振动信号,这些振动信号的频率可以通过在弹丸头部施加一单位脉冲力进行模态分析得到[9-10]。采用长度为1.3 m的弹丸撞击一厚钢板得到脉冲信号。在弹丸底部对称安装两个压电加速度传感器,一个不加滤波垫,另一个加滤波垫;加滤波垫的传感器的安装方式与图3相同,螺栓拧紧力矩为0.1 N◦m。不加滤波材料的传感器测量得到的信号如图8所示。

图8 不加滤波的输出信号Fig.8 Output signal without filtering
弹丸的振动频谱主要集中在30 k Hz以内,由于50 k Hz是传感器的谐振频率,故50 k Hz附近的幅值较大。图9所示是弹丸撞击钢板的冲击过载波,持续时间约为110μs,其后粘连大量的弹体振动信号,振动信号的峰值甚至大于冲击过载信号的峰值,给层数识别电路中阈值电压的设置带来困难[11]。
需要说明的是,本实验的信号粘连是指时间串联上的粘连,即由于刚体过载的时间较短,刚体过载与振动响应发生是不同步的,但在时间上是连续的。在实际侵彻中,弹丸穿靶的过程有时会较长,振动信号与刚体过载信号会产生时间并联上的粘连,这时的刚体过载信号频带较窄且集中在低频带[7]。由于振动信号的同时性,混叠后的信号频谱在高于刚体过载频段的频带与图8(b)所示相同;时域信号与图8(a)所示相似,不同的只是高频段的峰值而已,这不会影响滤波截止频率的选择及后续信号识别阈值是否易选。
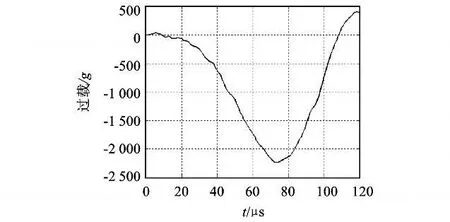
图9 冲击过载波Fig.9 Impact overload wave
实验用滤波垫材料有三种:一是天然橡胶,与滤波原理分析中采用的材料相同;其它两种材料分别为丁腈橡胶与聚碳胺脂。加有三种滤波垫的传感器输出信号如图10—图12所示。
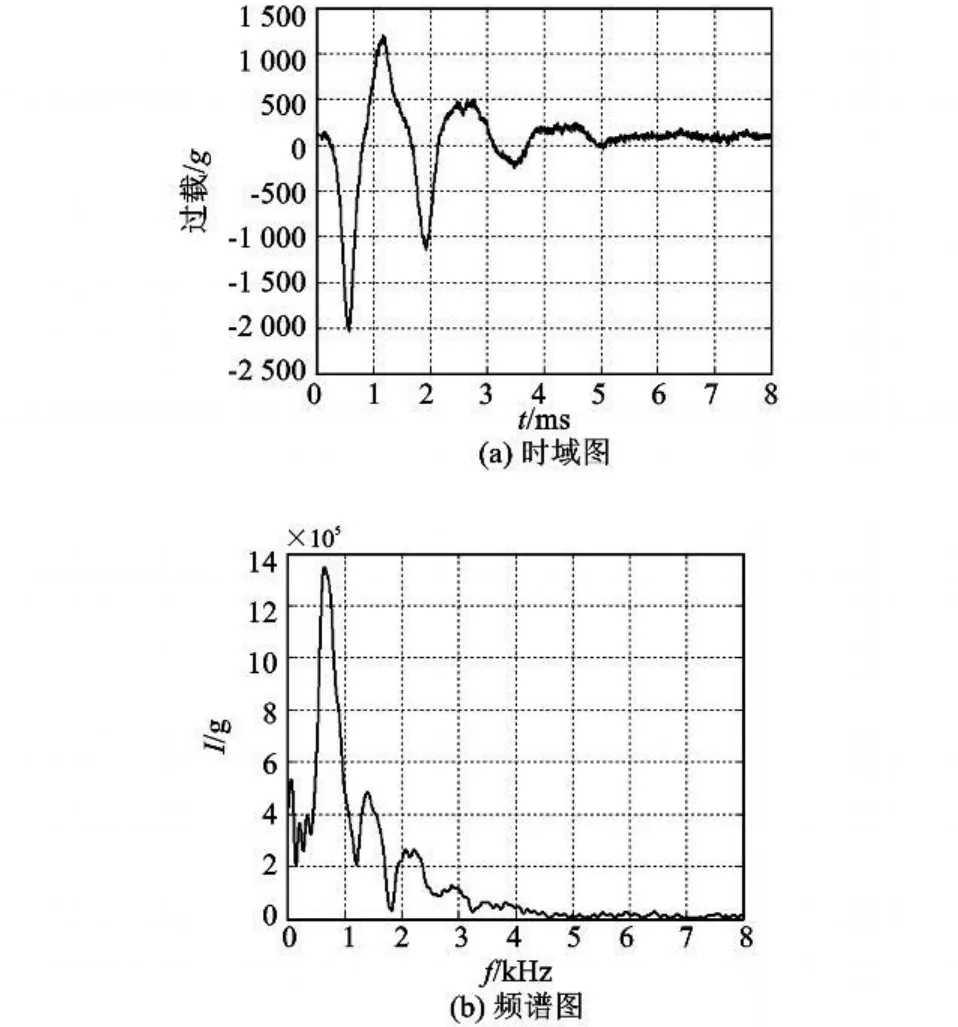
图10 垫有天然橡胶的传感器输出信号Fig.10 Output signal of sensor filtered by natural rubber

图11 垫有丁腈橡胶的传感器输出信号Fig.11 Output signal of sensor filtered by NBR
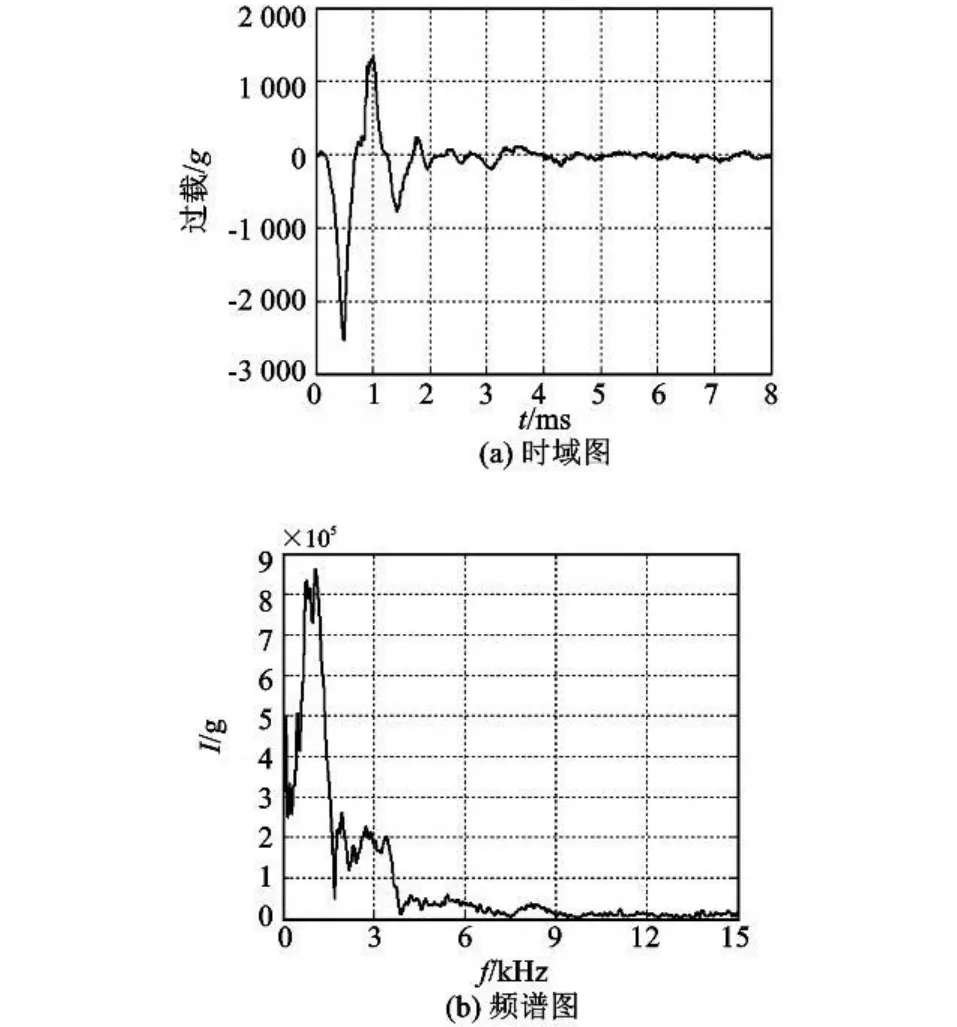
图12 垫有聚碳胺脂的传感器输出信号Fig.12 Output signal of sensor filtered by PC
从图中可以看出,加了滤波垫后的传感器输出信号的频率范围有了明显减小。经过对加垫前后的输出信号频谱图对比,可以看出加了天然橡胶滤波垫后的测量系统可以滤掉频率大于4 k Hz的信号,这与理论分析结果是一致的。同时,加了丁腈橡胶的测量系统可以滤掉频率大于7 k Hz的信号,聚碳胺脂可以滤掉频率大于10 k Hz的信号。丁腈橡胶与聚碳胺脂的实验结果与理论分析结果也是一致的,理论分析方法与天然橡胶相同,不再详细论述。
更重要的是,经过三种材料滤波后的信号起始段都有一个明显的半正弦波即有效波,峰值远大于后面振动波的峰值,这样便于信号处理电路阈值电压的设置。有效波峰值与冲击过载波峰值接近,具体数据见表1。
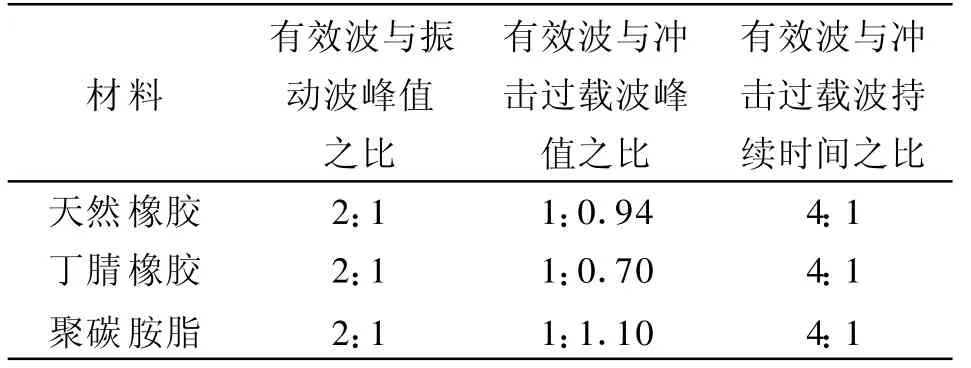
表1 加滤波垫后的实验结果Tab.1 Experiment results of system with filtering pad
在硬目标识别技术中,更关心两点:一是有效波与振动波峰值之比;二是有效波持续时间与冲击过载波持续时间之比。有效波与振动波的峰值之比越大,越易于阈值电压的设置;在弹丸实际侵彻硬目标时,由于弹丸头部穿靶的时间较长,冲击过载波的持续时间要大于110μs,其频率低于冲击实验中冲击过载波的频率,经过低通滤波后的过载信号的有效波与振动波的峰值之比有所增加,更易于阈值电压的设置。
由冲击实验发现,有效波持续时间与冲击过载波持续时间之比太大,这会造成由于信号迟滞带来的多层目标识别时层与层之间的信号叠加问题。但是在实际侵彻中,冲击过载波的持续时间较长,滤波后有效波与冲击过载波两者的持续时间之比不会太大,对信号叠加的影响不大,具体要视弹丸头部的长度、着速、靶厚以及靶板之间的距离来定。
5 结论
本文提出了硬目标识别技术中的机械滤波方法,该方法是通过在压电传感器前后端加滤波垫起到信号滤波作用的,-3 dB滤波截止频率的大小与滤波材料的刚度与阻尼成正比,随着刚度的逐渐增大,阻尼对截止频率的影响越来越小。
通过弹丸冲击实验验证了理论分析的正确性与方法的可行性,证明了天然橡胶、丁腈橡胶与聚碳胺脂可以作为很好的硬目标识别用滤波材料。
[1]藏晓京.国外攻击硬目标和深埋地下目标的引战技术发展[J].飞航导弹,2006(1):43-51.
[2]虞青俊,李玉龙,金连宝,等.侵彻多层混凝土目标弹丸过载特性研究[J].探测与控制学报,2007,29(1):13-17.YU Qingjun,LI Yulong,JIN Lianbao,et al.Research of deceleration-time curves during penetration of multi-plate concrete targets[J].Journal of Detection&Control,2007,29(1):13-17.
[3]朱松俭,涂诗美,苏伟,等.一种测定复杂介质的实时算法[J].探测与控制学报,2004,26(2):28-31.
[4]Forrestal M J,Frew D J,Hickerson J P,et al.Penetration of concrete targets with deceleration-time measurements[J].Int J Impact Engng,2003,28(5):479-497.
[5]王成华,陈佩银,徐孝诚.侵彻过载实测数据的滤波及弹体侵彻刚体过载的确定[J].爆炸与冲击,2007,27(5):416-419.WANG Chenghua,CHEN Peiyin,XU Xiaocheng.Filtering of penetration deceleration data and determining of penetration deceleration on the rigid-body[J].Explosion and Shock Waves,2007,27(5):416-419.
[6]李世义.动态测试技术基础[M].北京:国防工业出版社,1989.
[7]Anthony S Chu.Problems in high-shock measurement[C]//59th Shock and vibration Symposium.New Mexico,USA,October 1988.
[8]屈维德.机械振动手册[M].北京:机械工业出版社,1992.
[9]黄家蓉,刘瑞朝,何翔,等.侵彻过载测试信号的数据处理方法[J].爆炸与冲击,2009,29(5):555-556.HUANG Jiarong,LIU Ruichao,HE Xiang,et al.A new data processing technique for measured penetration overloads[J].Explosion and Shock Waves,2009,29(5):555-556.
[10]王亚斌.引信全弹道动态特性虚拟实验技术[D].北京:北京理工大学,2004.
[11]吴晓莉,唐亚鸣,张河,等.硬目标引信侵彻及穿透的特征识别技术研究[J].弹箭与制导学报,2003,23(增3):339-340.