基于 CC2430的无线传感器网络系统节点设计
2010-08-17于金涛姜海涛李俊玲丁明理
于金涛,韩 轲,姜海涛,李俊玲,丁明理,李 云
(哈尔滨商业大学计算机信息与工程学院,哈尔滨 150028)
无线传感器网络(Wireless Sensor Network,WSN)的目的是协作地感知、收集和处理传感器网络所覆盖的地理区域中感知对象的信息,并传递给观察者[1-3].这种传感器网络集中了传感器技术、嵌入式计算机技术和无线通信技术、能协作地感知、监测和收集各种环境下所感知对象的信息,通过对这些信息的协作式信息处理,获得感知对象的准确信息,然后传送到需要这些信息的用户.
一个典型的传感器网络的系统结构,包括分布式传感器节点(群)、接收发送器、互联网和用户界面等[4],如图1.其中,传感器网络节点的基本组成包括如下几个基本单元:传感单元(由传感器和模数转换功能模块组成)、处理单元(包括 CPU、存储器、嵌入式操作系统等)、通信单元(由无线通信模块组成)以及电源.这些节点通过自组织方式构成无线网络,以协作的方式实时感知、采集和处理网络覆盖区域中的信息,并通过多跳网络将数据经由Sink节点(接收发送器)链路将整个区域内的信息传送到远程控制管理中心[5-8].反之,远程管理中心也可以对网络节点进行实时控制和操纵.
1 CC2430芯片介绍
本文采用集信号采集、数据处理和无线通信于一体的 CC2430芯片作为信标节点和移动节点的主控单元,开发具有超低功耗、较强计算能力的信标节点和移动节点,最大程度地降低单节点硬件成本,为最终实用化做准备.
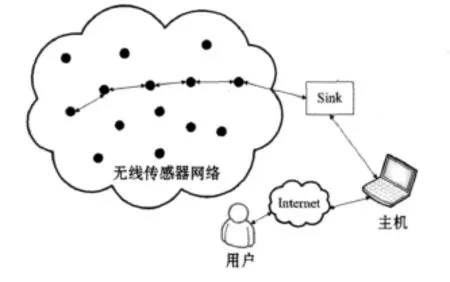
图1 无线传感器网络基本组成
本文所采用的是功能强大的 ZIGBEE无线单片机 CC2430,它是以经典 8051微处理器为内核的无线单片机,也称“射频片上系统”.它集成符合IEEE802.15.4标准的 2.4 GHz的 RF无线电收发机;具有优良的无线接收灵敏度和强大的抗干扰性;具有数字化的RSSI/LQI支持和强大的 DMA功能;它还集成了 14位模数转换的 ADC,并且带有 2个强大的支持几组协议的 USART,以及 1个符合IEEE 802.15.4规范的 MAC计时器,1个常规的16位计时器和 2个 8位计时器.具有高性能和低功耗的特点,因而能很好的完成本设计的要求.
2 节点结构设计
本设计中无线传感器网络系统的节点主要由主节点、移动节点及信标节点 3部分组成.如图2.

图2 主节点功能示意图
2.1 主节点结构设计
主节点的主要功能是完成信标节点数据的整合,以及在信标节点、移动节点与 PC机之间相互传递信息.当无线传感器的领域扩大后,会被划分成多个小的区域,而每一个小区域中的主节点又充当着标识该区域、以及与下一个区域的主节点进行通信的作用.
主节点通过无线方式获得移动机器人的当前位置、行进方向的信息,并通过串口发送给 PC机;接收 PC机的指示,并通过无线方式发送给其他节点.
利用串口可方便地实行主节点与 PC机的通信.
PC机有标准 RS-232C串行口,信号电平为RS-232C电平.RS-232C采用负逻辑,即逻辑“1”为 -5~-15V,逻辑“0”为 +5~+15V.
单片机 CC2430的 P0.2(11)和 P0.3(9)分别为串行数据接收端 RxD和发送端 TxD,接收和发送信号为 TTL电平.TTL电平的逻辑“1”和逻辑“0”分别为 3V和 0V.
因此单片机和 PC机串行通信时,需利用芯片MAX3232进行 RS-232C电平和 TTL电平的相互转换,如图3.将 MAX3232的 7、8脚分别接入 PC机串口的 2、3脚 ,9、10脚接 CC2430的 P0.2、P0.
3,即可实现 PC机与单片机的串行通信.
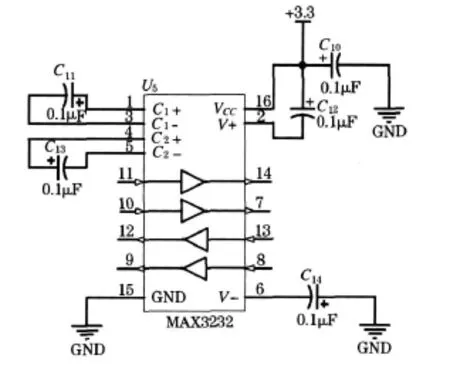
图3 M AX 3232的应用电路
2.2 移动节点结构设计
移动节点是一个两轮式机器人,有两个主动轮和一个支撑轮,见图4.主动轮通过直流电机驱动可执行前进、后退转弯等各种姿态的运动.支撑轮在后方,可以作 360°范围内的自由转动,可以维持车体的水平,又不影响运动的灵活性.移动机器人除具有其他节点所需模块外,还有运动控制模块控机器人的各种运动,航向控制模块测出和控制机器人的航向,导航控制模块引导机器人运动到目标节点,结构图见图5.

图4 移动机器人实物图

图5 移动机器人结构图
2.3 信标节点结构设计
信标节点的主要功能有 2个:①作为传感器节点,连接测量各种信号的传感器,由传感器感知所需监测区域的所需监测变量,并进行初步处理,然后通过无线方式发送给主节点;②作为信标,通过测量移动节点的 RSSI值,以确定移动节点当前位置,及对移动节点进行导航.
因为信标节点的结构基本相同,因此为区分各信标节点,给它们各自一个不同的标识,即为地址,称为节点地址或节点 ID.当信标节点与其他节点通信时,其他节点会根据这个地址判断数据来自于何节点.
2.4 节点间的无线通信
CC2430无线单片机内部集成了全部 802.15.4短距离无线通讯标准所需要的高频电路部分,CC2430的接收器是基于低 -中频结构之上的,从天线接收的 RF信号经低噪声放大器放大并经下变频变为 2 MHz的中频信号.中频信号经滤波、放大,在通过 A/D转换器变为数字信号.自动增益控制,信道过滤,解调在数字域内完成以获得高精确度及空间利用率,见图6.集成的模拟通道滤波器可以使工作在 2.4GHz ISM波段的不同系统良好的共存.在发射模式下,位映射和调制是根据 IEEE 802.15.4的规范来完成的.调制(和扩频)通过数字方式完成.

图6 CC 2430无线接收器
3 实验及结果分析
串口通信在无线传感器网络中十分重要,因为串口可以将无线传感器网络与人机接口联系在一起,用户可以通过 PC机来观测无线传感器网络工作正常与否.串口的测试分为 3个阶段.
1)由 CC2430通过串口发送一串固定数据,通过串口调试助手观测是否有数据,及数据是否正常.
2)由串口调试助手发送一串数据,由 CC2430接收后再由串口发出,然后由串口调试助手观测该数据是否与刚才发出的数据相同,见图7.
3)通过 PC机上的数据管理系统与主节点串口通信,用于发送控制指令和接收各节点 RSSI信息.
经过这些调试后,串口可以正常工作,接收和发送数据一切正常,用户可以通过 PC机与无线传感器网络进行对话,控制移动机器人及获得无线传感器网络的相关信息.

图7 串口助手串口调试图
无线通信实验
无线通信的结果不容易直接观测,因此需要通过上面所述的串口通信帮助观察结果,具体步骤如下:
1)无线通信模块上有一红一绿两个 LED,其中一个作为发送指示(红),另一个作接收指示(绿).当无线模块不工作时,两个 LED均处于熄灭状态;当无线模块向外发送一串数据时,红灯闪烁1次;当无线模块接收到一串数据时,绿灯闪烁 1次.
2)利用两个模块,其中一个(节点 1)通过串口与 PC机相连,另外一个(节点 2)与其进行无线通信.PC机利用串口助手向节点 1发送一串数据,节点 1通过无线方式将该数据发送给节点 2,节点 2收到数据后,将该数据再由无线方式发回节点 1,节点 1再由串口发送到 PC机,PC机通过串口助手可以观测该数据是否与刚才发送的数据相同,如果相同则证明无线收发成功.
3)各信标节点与移动机器人无线通线,以获得移动节点与各个信标节点的 RSSI,并通过无线方式发送给主节点.最后通过串口将 RSSI传送给PC机,如图8.
经过实验,节点间的无线通信工作正常,可以准确、高速、稳定的传输所需发送的数据.本节点设计小巧、方便,具有较强的实用推广价值.

图8 无线接收的RSSI在PC机上显示图
[1] SIBLEY G T,RAHIMIM H,ROBOMOTEG S.A Tiny Mobile Robot Platform for Large-Scale Ad-hoc SensorNetworks[C]//Proceedingsof the 2002 IEEE International Conferenceon Robotics and Automation,Washington D.C.,USA,May,2002:1143-1148.
[2] MCMICKELL M B,GOODWINE B.A Robotic Platform for Large-Scale Distributed Robotics[C]//Proceedings of the IEEE International Conference on Robotics and Automation.Taipei,Taiwan,2003:1600-1605.
[3] BERGBREITER S,PISTER K SJ.An Off-the-shelf Platform for Distributed Robotics[C]//Proceedingsof the IEEE/RSJ.International Conference on Intelligent Robots and Systems.Las Vegas,Nevada,USA,2003:1632-1637.
[4] AKYLIDIZ I,SUW.Wireless sensor networks:A survey[J].Computer Networks,2002,38(4):393-422.
[5] 赵 海,赵 杰,刘 铮,等.一种无线传感器网络节点的设计与实现[J].东北大学学报,2009,30(6):809-812.
[6] 秦 岭,胡荣强,李知践.无线传感器网络节点节能研究[J].武汉理工大学学报,2009,31(3):369-371.
[7] 陈 娟,李长庚,宁新鲜.基于移动信标的无线传感器网络节点定位[J].传感技术学报,2009,22(1):121-125.
[8] 王立凯,王丽梅.基于 R-Tree结构的无线传感器网络历史查询研究[J].哈尔滨商业大学学报:自然科学版,2008,24(5):557-561.
