UUV导航系统故障模式危害性灰色分析*
2010-08-11宋保维
黄 燕 宋保维
(西北工业大学航海学院 西安 710072)
1 引言
随着水下航行器(UUV)在深水勘探、沉船打捞、水下电缆铺设及维修、水下声源探测、水下侦查、水下通信和反潜、反水雷、信息战等领域得到广泛使用[1],用户对UUV的性能和可靠性要求越来越高。UUV导航系统担负着导引航行方向的重要任务。导航系统由航向姿态陀螺装置、速度测量组件、控制微机、深度传感组件、壳体等组成,当系统内任何组件出现故障时,将导致UUV出现一系列故障,轻则出现计划外维修、不能圆满完成任务,重则UUV丢失、甚至将战斗部携带至非预定海域。在投入资金有限的情况下对UUV导航系统故障模式进行危害性分析(CA),找出危害性最大的故障模式对其进行改进,可以达到合理利用有限资源解决关键问题的目的。
CA是基于FMEA(故障模式及影响分析)评价故障模式危害性的方法[2],由设计人员和专家根据产品故障模式发生的频率和影响严重程度给出评估或画出危害性矩阵图,再比较出危害性的严重程度,给出“严重、较严重”等定性结论。目前的方法存在以下问题:1)仅用发生频率和严重程度来描述故障模式危害性;2)在分析中所用的信息是不确定或不完全的。当被分析对象较简单、需考虑的项目不多、对分析结论要求不高时,可以采用目前的方法进行定性分析。
但在工程实际中,仅用发生频率和严重程度来描述故障模式危害性是不够的,还应该综合考虑产品的测试性、维修性、维修费用等多种特性,另外分析中所用的信息、环境条件不确定,实际情况较为复杂。如:控制微机的故障模式有多种,有些故障模式危害性不大,有些却是致命的;维修方法、级别也有多种,有时仅需更换个插头,有时却需更换整个CPU芯片;在基层的维修和在基地的维修办法也不同[3];维修的时间和费用差异极大[4]。采用语言描述难以得到定量的计算结果,另一方面在复杂情况下,用语言较难理顺各种模式与方法间的关系,属多目标、不确定性的决策问题。灰色系统理论[5]多用于解决不确定性问题,近年来许多文献[6~9]在该领域做了大量研究。运用灰色系统理论对导航系统的各种故障模式进行综合评估,把评估者给出的不确定信息量化,最终得到确切的数值结论,可为故障改进决策提供准确数据支持。
2 导航系统主要故障模式
导航系统的主要故障模式有:
1)航向姿态陀螺装置无信息输出、输出错误信号;
2)速度测量组件无信息输出、输出错误信息;
3)控制微机工作异常、死机;
4)深度传感组件无信息输出、输出错误信息;
5)壳体损坏,不能密封;
6)各组件间的信息通讯不正常。
以上组件的故障模式都将导致导航系统无法正常工作,或无法对UUV进行正确导航,最终导致UUV漏水、内部因进水损坏甚至沉没,或航向错误甚至UUV丢失。
3 评估内容定量化
为实现故障模式危害性的定量分析,需确定各种危害性因素的量值,需要考虑的因素(以下称指标)如下:
1)故障发生的频率;2)影响的严重程度;3)未被检测出的概率,即测试性;4)维修的难易程度,即维修性;5)维修的成本。
各种指标进行评分的分值如表1~5所示。

表1 故障模式危害性指标的等级划分(故障频率)

表2 故障模式危害性指标的等级划分(严重度)

表3 故障模式危害性指标的等级划分(测试性)

表4 故障模式危害性指标的等级划分(维修性)

表5 故障模式危害性指标的等级划分(维修费用)
4 评估指标体系中指标的权重
将以上评价因素作为评估指标体系的指标,各指标的相对重要程度在不同的时机(级别)是不一样的,有时维修费用显得重要,而有时维修时间长短更为重要,为此需要请业内专家和使用部门对指标的重要程度进行评分,对众专家的评分进行综合后可以得到各指标的权重。具体评分收集表如表6所示。
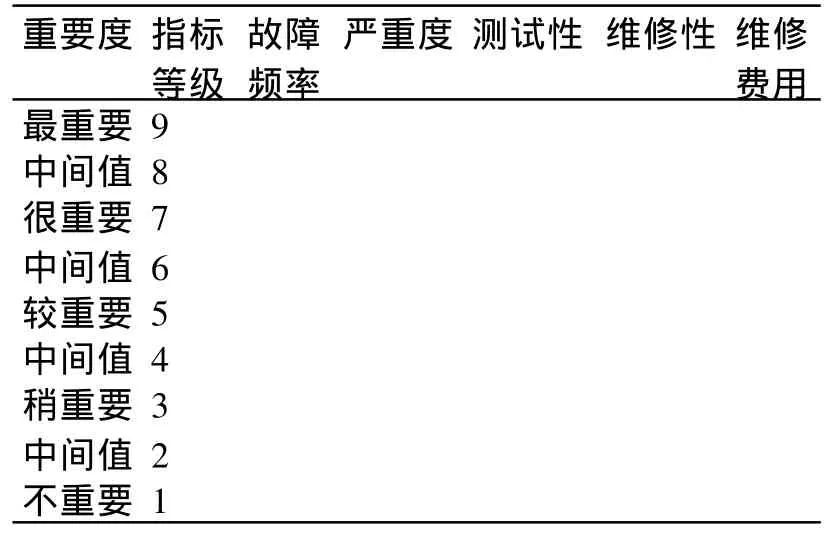
表6 指标权重评分收集表
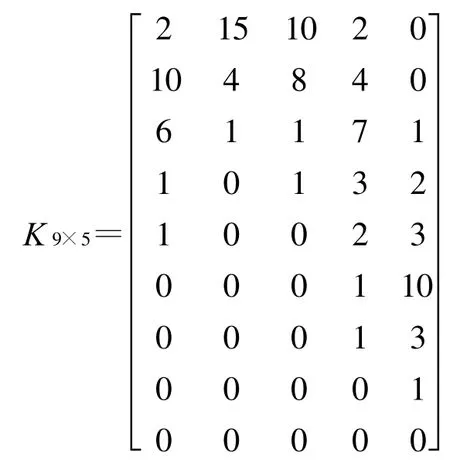
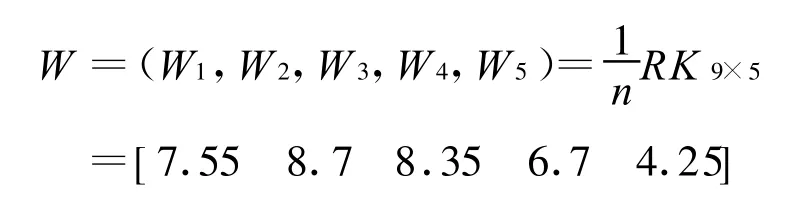
将表6分发给每个专家1份,专家对每个指标的重视程度打“√”,收集后统计每个指标所得的“√”数目,直接按表6中的顺序构成矩阵,即指标重要度得分矩阵K9×5,再计算指标权重矩阵:

式中:n为参加评价打分的专家人数,R为指标等级分值:R=(9,8,7,6,5,4,3,2,1)
5 各故障模式的危害性指标评估矩阵
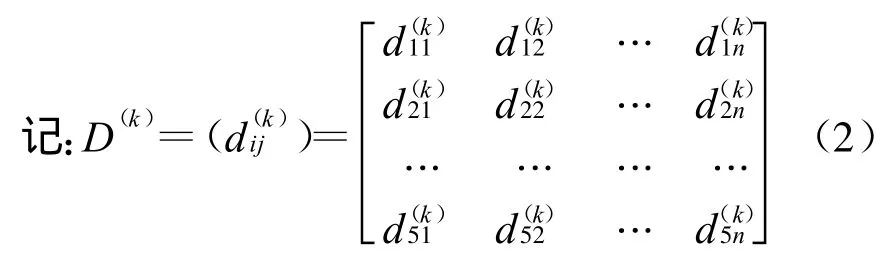
设系统有k种故障模式,每个故障模式有5种评价指标,共有j位专家按表1进行评分,经统计得评分矩阵:
6 评价灰类
6.1 灰数的分类
将故障模式危害性指标得分所属灰类分为四类,即 1、2、3、4类对应“高”、“较高”、“一般”“低”类。设 1类下限为H,2类中限为Z,3类中限为G,4类上限为L。1类灰数⊗∈[Z,10),白化权函数如图1所示,计算公式为:

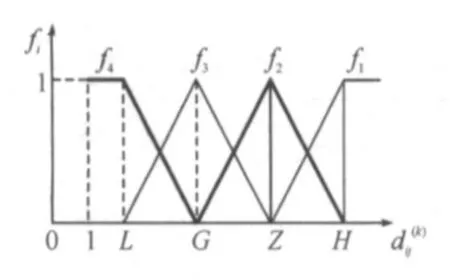
图1 白化权函数
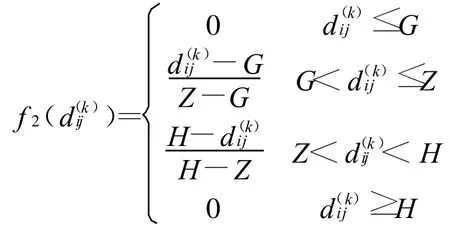
2类灰数⊗∈[G,H),白化权函数如图1所示,计算公式为:
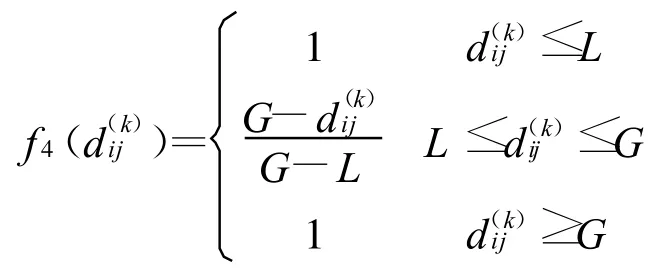
3类灰数⊗∈[L,Z),白化权函数如图1所示,计算公式为:
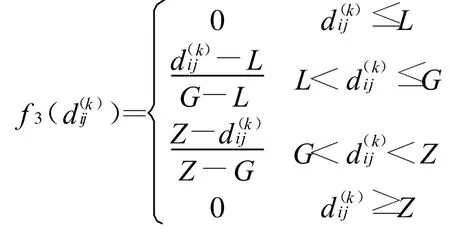
4类灰数⊗∈[1,G),白化权函数如图1所示,计算公式为:
6.2 灰类的权重及评估系数
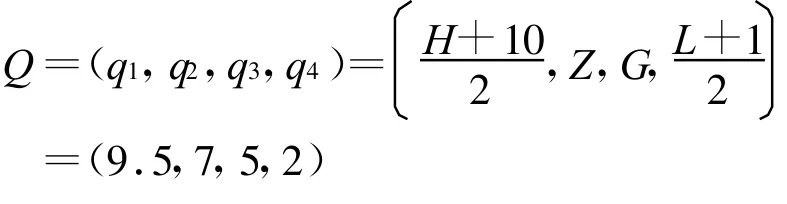
将以上4种灰类的权重设定为:

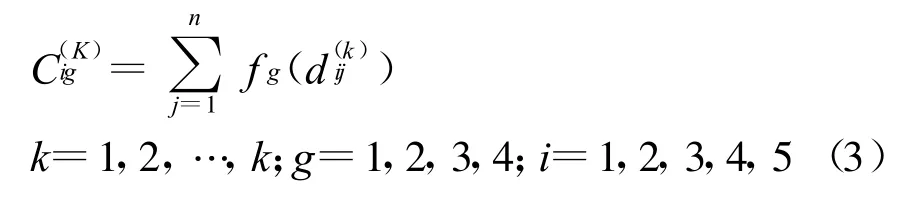
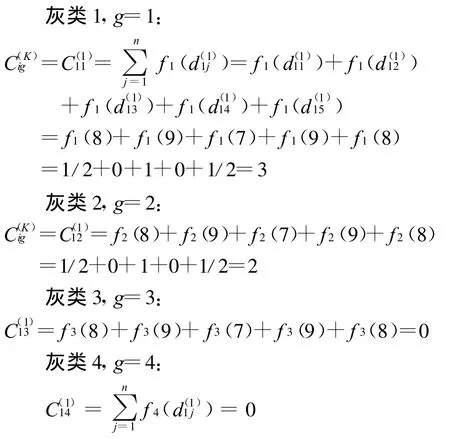
计算危害性灰色评估系数:对第k个故障模式的指标i属于g灰类的灰色评估系数为,计算公式为:
7 综合灰色评估值
取故障模式所属灰类的最大值:

可知故障模式k、指标 i属于g灰类,对应的灰类权重为qg,因此,故障模式K的全部危害性指标i得到所属灰类的灰类权重向量:

由灰类权重向量和危害性指标权重可得第k个故障模式危害性的综合灰色评估值Zk,

将故障模式危害性的综合灰色评估值Zk进行比较,即可知道各种故障模式的危害性大小。
8 实例分析
某UUV导航系统有5种主要的故障模式:姿态陀螺故障、测速组件故障、控制微机故障、传感器故障、壳体密封故障,共有20名专家参加评价指标权重,根据表2指标权重评分收集表得到打分的情况:
计算指标权重矩阵:
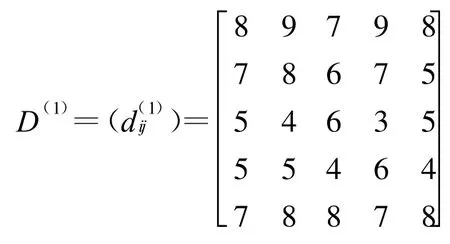
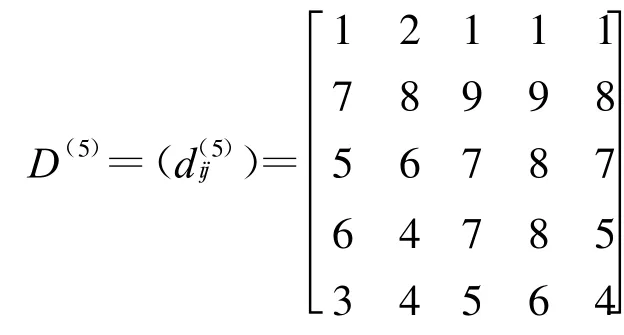
在对故障模式的危害性进行评分时,有j=5个专家参加了打分,i=5个指标,k=5种故障模式,得评估样本矩阵如下:
第一种故障模式,姿态陀螺故障:
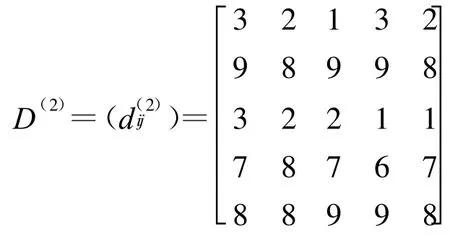
第二种故障模式,测速组件故障:
第三种故障模式,控制微机故障:

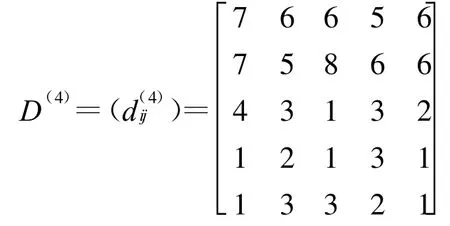
第四种故障模式,传感器故障:
第五种故障模式,壳体密封故障:
根据评估灰类:高、较高、一般和低,设:H=9,Z=7,G=5,L=3。灰类的权重为:
计算灰色评估系数:第k=1种故障模式对应指标i=1(发生频率)属于各灰类的系数为:
故障模式1各指标的灰类权重为:X1=[9.5,7,5,5,7]T。
同理可得到故障模式2~5对各指标的灰类权重为:X2=[2,9.5,2,7,9.5]T;X3=[2,9.5,7,7,5]T;X4=[5,7,2,2,2]T;X5=[2,9.5,7,7,5]T。
在计算中,有时会出现最大值不唯一,即所属灰类有2个的情况,针对危害性的改进需要,可取较小的灰类。
计算灰色综合评估值:
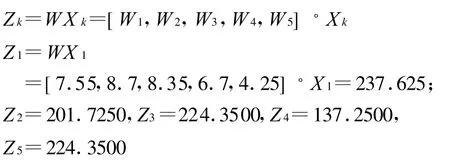
由计算结果可知:5种故障模式中,危害性较大的是模式1,模式3和5的危害性相等,模式4的危害性最小。如果要进行改进,需先采取措施解决故障模式1。
9 结语
应用灰色综合评估方法进行故障模式危害性分析,能将涉及多种复杂项目、评估不确切的问题定量化,可从多方面考虑故障模式的危害性。由于计算过程繁琐,对于涉及多种复杂指标或参与评估的专家众多的情况,可通过计算机进行处理。文中只讨论了导航系统内部件级的故障模式,如需再到零件一级或上一级,还可以扩展,可将本级的计算结果带入下一级计算。
[1]王建斌,王志敏.U UV发展、应用及关键技术[J].信息与电子工程,2007,12(5):476~480
[2]杨为民,阮镰,俞沼,等.可靠性、维修性、保障性总论[M].北京:国防工业出版社,2001,12:62~67
[3]梁庆卫,宋保维,潘光.鱼雷武器系统基地级维修时间的模糊灰色模型[J].计算机工程,2006(9):17~19
[4]潘光,毛昭勇,宋保维,等.预防性维修周期优化决策研究[J].机械科学与技术,2007(4):518~520
[5]刘思峰,党耀国,方志耕,等.灰色系统理论及其应用[M].第三版.北京:科学出版社,2004,11
[6]王桂萍,贾亚洲.申桂香,等.加工中心冷却系统故障模式危害性模糊评价分析[J].农业机械学报,2008,3(39):171~174
[7]唐五湘.系统可靠性指标的灰色评估分配法[J].系统工程理论与实践,1994(12):34~39
[8]胡方,黄建国,张群飞.基于灰色系统理论的水下航行器效能评估方法研究[J].西北工业大学学报,2007(6):411~415
[9]绍旭飞,宋保维,毛昭勇,等.串联系统可靠性分配的模糊层次分析方法[J].弹箭与制导学报,2007(1):250~256
