机动目标跟踪系统仿真软件设计与实现
2010-08-10胡炎林哲锋张丕旭
胡炎 林哲锋 张丕旭
(1. 海军驻西安舰炮军事代表室,西安 710043;2. 海军驻温州地区军事代表室,温州 316000;3. 海军工程大学电子工程学院,武汉 430033)
1 引言
机动目标跟踪的基本概念在五十年代己经形成,但直到70年代卡尔曼滤波理论成功地在机动目标跟踪中应用以来,机动目标跟踪技术才真正引起人们的普遍关注和极大兴趣。机动目标跟踪理论需要综合运用随机统计决策、估值理论、最优化算法等现代信息处理技术跟踪目标运动轨迹。所涉及的问题是控制、指挥、通讯和情报学科发展的前沿问题,是当今国际上研究的热门方向[1,2]。
本文采用 C/S(Client/Serve,客户机/服务器)体系结构和面向对象的模块化设计思想,设计了机动目标跟踪系统仿真软件,利用剧情生成模块模拟雷达探测到的目标运动数据,通过跟踪算法对目标实施跟踪处理,估计目标运动状态,实时地在演示界面上显示目标运动信息和跟踪性能评估结果,建立了一个具有较高可信度的、直观的仿真系统,为机动目标跟踪算法研究提供一个测试、集成、检验和验证的综合一体化仿真环境。
2 软件结构设计
C/S结构,即大家熟知的客户机和服务器结构,是基于资源不对等性,为实现共享而发展起来的,其发展成熟于上世纪八九十年代。从开发角度看,C/S模型具有强大的数据操作和事务处理能力,且开发模型简单,易于人们理解和接受。系统的客户应用程序和服务器构件充分隔离,易于扩充和压缩,且分工具体,客户应用程序的开发集中于数据的查询浏览,而数据库服务器的开发则集中于数据的管理。由于客户端与服务器的直接相连,因此实时性较好。另外,客户操作界面设计有针对性,可满足客户个性化的业务要求。C/S结构的这些技术特点完全满足本设计的基本要求。
2.1 系统拓扑结构
系统整体是一种C/S体系结构,但是其中各个主模块有自己特定的内部结构,具体拓扑结构如图1所示。
2.2 系统结构组成
本软件系统结构设计主要由剧情生成模块(包括剧情生成器、雷达模拟器等)、跟踪算法实现模块和测试评估模块(包括数据库、测试评估软件等)组成,如图2所示。
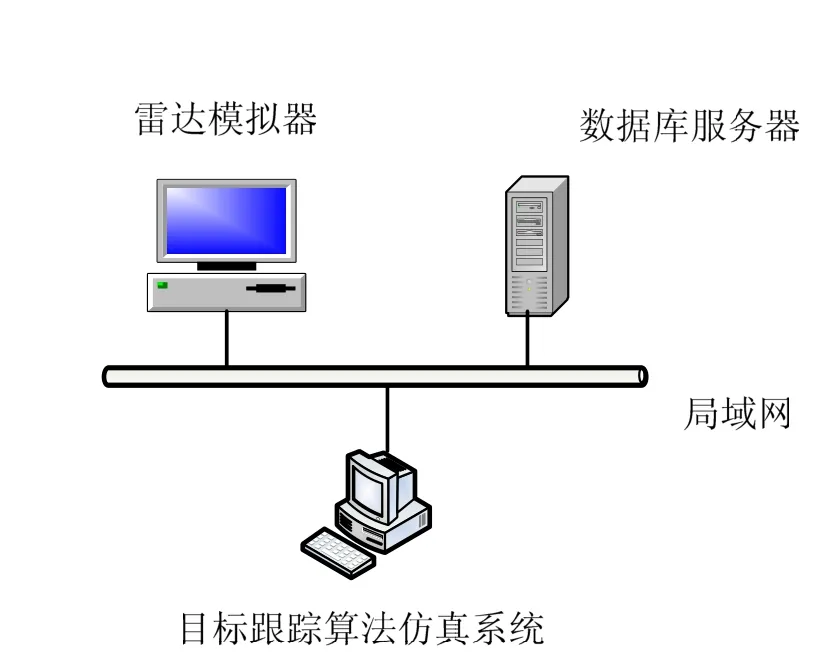
图1 系统拓扑结构简图
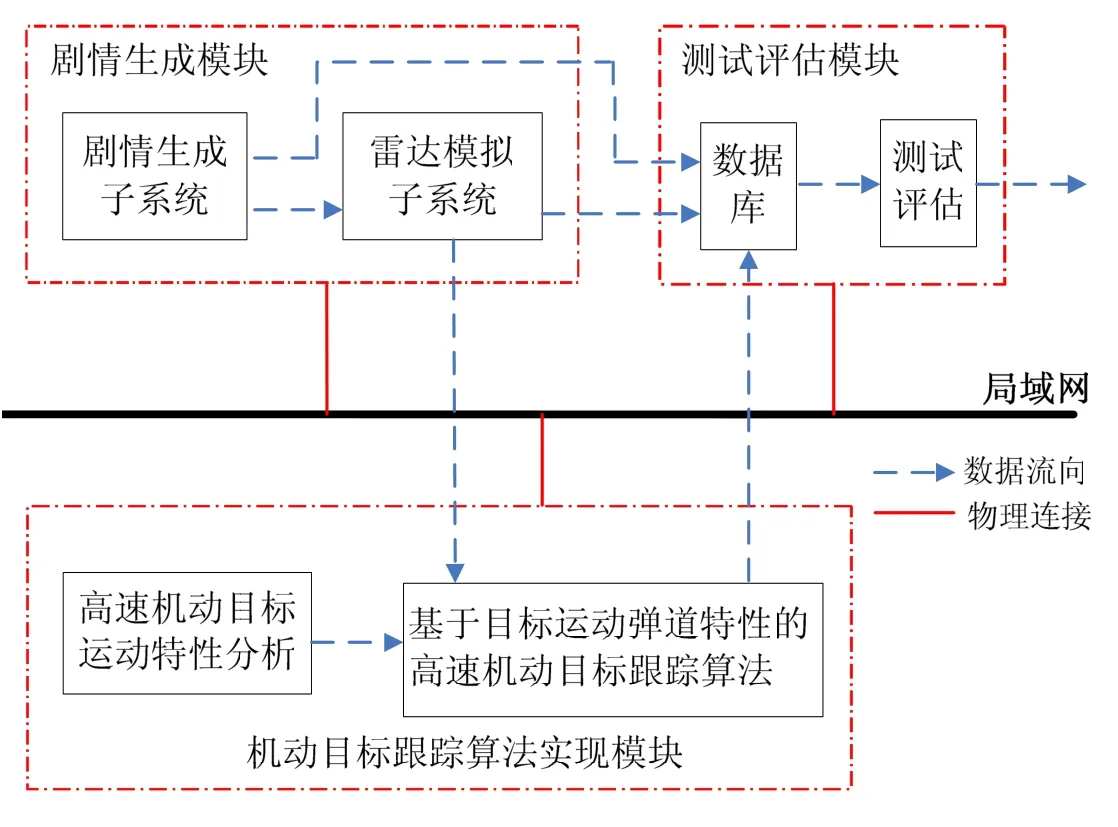
图2 系统结构组成图
(1)剧情生成模块:根据剧情想定的真值数据,由雷达模拟器生成目标观测数据。
(2)机动目标跟踪算法实现模块:接收模拟产生的目标观测数据,对目标实施跟踪处理,估计目标运动状态。
(3)测试评估模块:由目标真值数据、观测数据和滤波数据评估机动目标跟踪算法的性能。
2.3 软件流程时序关系
剧情生成器首先根据剧情想定文件的配置要求,对雷达模拟器的仿真参数和舰艇导航信息进行配置,当配置完毕后,系统需要向剧情生成器发送反馈报文,报告传感器启动完毕。
剧情生成器接收到反馈报文后,向雷达模拟器和测试评估模块发送目标运动的真值信息。雷达模拟器接收到目标的真值数据后,按照传感器设计给定的仿真算法计算出模拟观测数据,并向网络发送,包括二次航迹数据、一次点迹数据和初步的目标识别结果。测试评估模块接收到目标的真值数据和雷达模拟器输出的模拟数据后,录入到数据库中,以便评估跟踪算法的性能。
跟踪算法实现模块从网络上接收到雷达模拟数据后,由数据预处理算法和跟踪算法得出目标运动数据的滤波值,再发送到测试评估模块。测试评估模块获得目标的真值数据、模拟数据和滤波数据后,就可以根据相应的性能指标评估跟踪算法的性能。同时,演示界面可实时显示目标运动信息和评估指标等,可直观的评判跟踪算法的性能。
系统流程的时序关系如图3所示。
3 软件主要模块设计
3.1 剧情生成模块
剧情生成模块的基本功能分两部分:产生目标真值信息和模拟雷达观测目标数据,模拟的目标观测数据实时地发送到跟踪算法实现模块和测试评估系统。
(1)产生目标真值信息
利用弹道建模技术,可设置战场态势,仿真获得高速机动反舰导弹的几种典型运动弹道数据;
(2)模拟雷达观测目标数据
雷达模拟器的功能主要包括模拟雷达终端显示和产生目标观测数据,数据处理流程如图4所示。
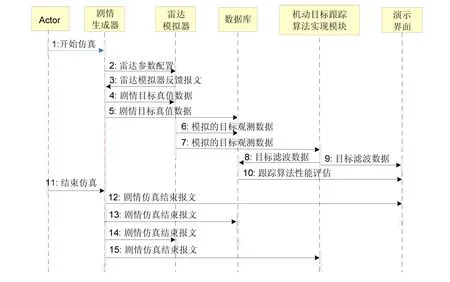
图3 系统流程的时序关系图
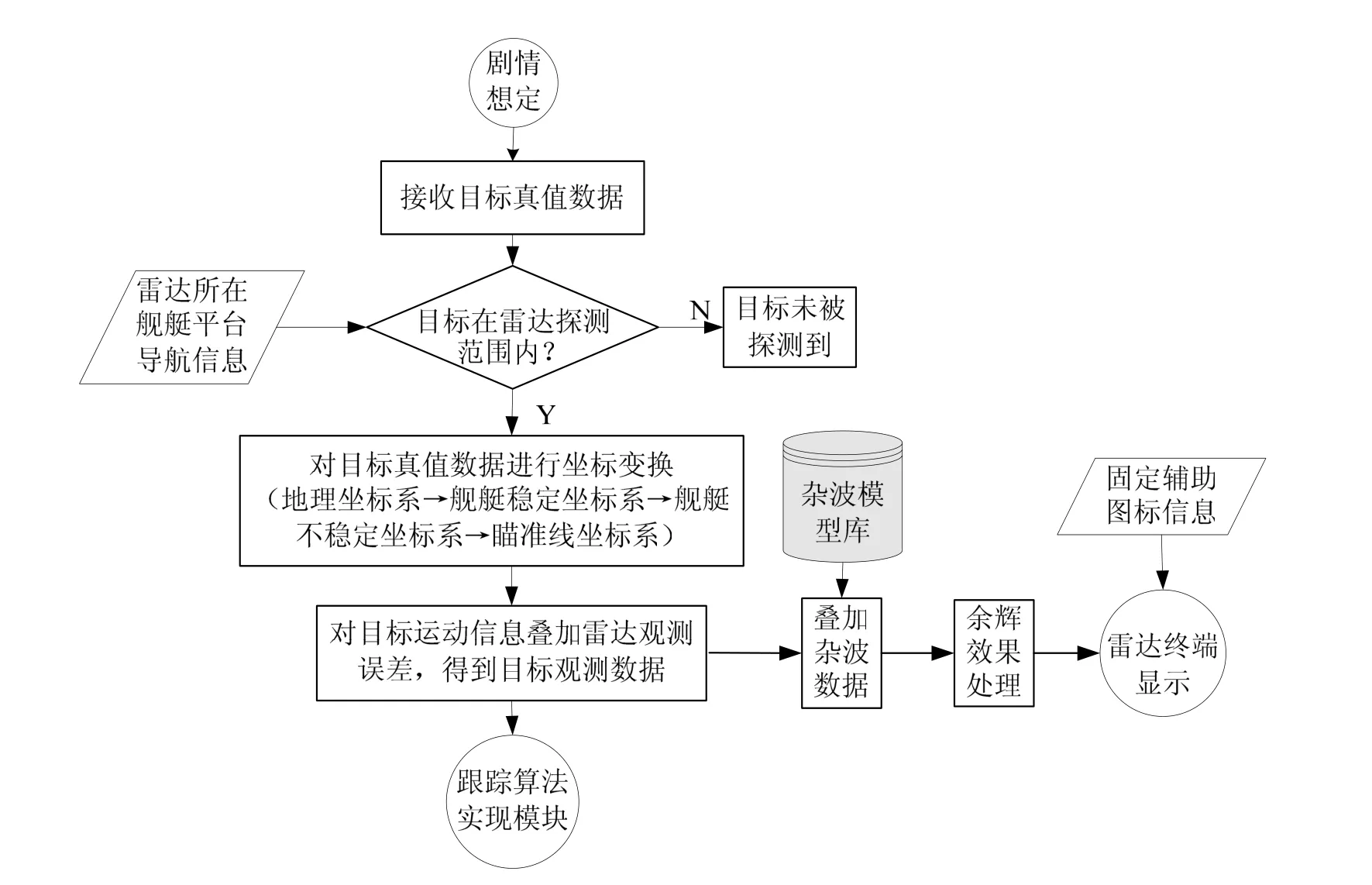
图4 雷达模拟器数据处理流程图
雷达终端显示的图像中,存在的信息不仅包括杂波和目标回波信息,还包括固定辅助图标信息,前者的图像信息在模拟中存在余辉效果处理的问题,而后者的信息是不需要进行余辉效果处理的。为了更好地解决上述两者间存在的矛盾,在设计中采用两块图像内存区分别存储,定义为内存A和内存B,内存区A用于存储目标和地物回波的图像信息,内存区B用于存储辅助图标信息。对内存区A的数据进行余辉衰减控制后再与内存区B的数据进行叠加实现对图像的显示。同时,为了更逼真地体现终端显控台生成的杂波图像,将雷达的实测数据以一定的数据格式(如二进制)存储到杂波模型库,仿真过程中,利用数据回放的方式实现杂波图像。
目标观测数据的产生应注意两个问题:第一,雷达有一定的探测范围,主要是受地球曲率、大气折射效应等因素影响,在剧情想定配置雷达参数时设置,所以要先判断目标是否在雷达探测范围内;第二,目标真值数据是相对于地理坐标系的,运用坐标变换的方法,将目标信息转换到雷达观测所处的坐标系,即瞄准线坐标系,再根据剧情想定中设置的雷达参数,对真值数据叠加误差,并模拟雷达观测目标的过程。
3.2 高速机动目标跟踪算法实现模块
该模块可针对特定的跟踪算法设计,跟踪算法实现流程如图5所示。从程序设计的角度来看,跟踪算法的实现主要在滤波与预测算法的实现上有所差异,而模型所对应的状态转移矩阵在实现上是一致的[3,4]。例如,传统的基于CV和CA模型的目标跟踪算法中是标准 Kalman滤波,近几年研究较多的基于参数辨识模型和弹道规律的机动目标跟踪算法中是在线辨识和 Kalman滤波,而多模型算法中存在模型之间的转换,这些区别都体现在算法的程序实现中。

图5 跟踪算法实现流程图
3.3 数据库
数据库在仿真系统运行过程中提供实时的数据存储、查询、统计和备份功能,以动态表和静态表的形式存储数据,例如,剧情控制信息、目标运动信息、平台导航信息等以动态表形式存储便于实时更新,而雷达参数信息、雷达杂波模型库数据等则以静态表的形式提前存储在数据库,只能查询不能更改[5]。
3.4 测试评估系统
测试评估系统是基于性能评估方法设计的,用于对目标跟踪算法的性能进行评估。常用的性能评估指标有:均值误差(ME)、相对均值误差(RME)、均方差(MSE)、相对均方误差(RMSE)、相对误差压缩比(RECR)、反应时间(RT)等[6]。
均值误差:

相对均值误差:

均方差:
相对均方误差:
相对误差压缩比:
反应时间:

其中,(i)、X(i)、Z(i)分别为i时刻的滤波值、理论值、观测值。
结合Monte Carlo仿真分析方法,利用数据库的查询和统计功能,对滤波值、理论值、观测值进行比较,获得均方差(MSE)、相对误差压缩比(RECR)、反应时间(RT)等评估结果,并在仿真演示界面上直观地显示出来[7]。数据流示意图如图6所示。
4 仿真实例
针对导弹末端做跃升俯冲攻击的运动态势,进行初始设置并运行仿真系统。初始设置如下:导弹开始跃升机动时的坐标为(2000 m,5 m),速度为850 m/s,切向加速度为10 m/s2,跃升时法向加速度为10 m/s2,俯冲时法向加速度为-10 m/s2;雷达测距误差为10 m,测角误差为1.5 mrad;采样间隔为0.01 s。
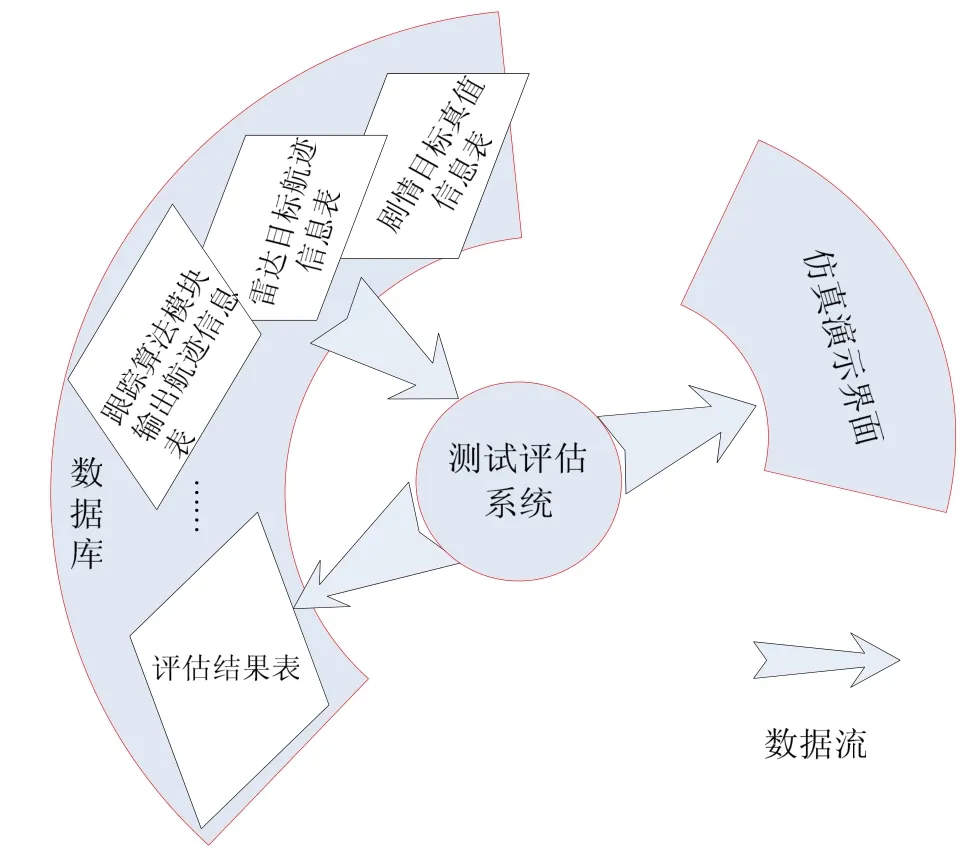
图6 测试评估系统数据流程图
启动基于弹道规律的机动目标跟踪算法,仿真系统运行结果如图7所示。系统运行过程中,可以直观地显示跟踪算法对仿真实例的处理过程,可信度较高。
5 结论
本文主要介绍了机动目标跟踪系统仿真软件的设计思路和方法,并给出剧情生成、跟踪算法实现和测试评估等主要模块的相关功能设计方案。软件采用C/S(Client/Serve)体系结构和面向对象的模块化设计思想,分工具体,实时性较好,利用剧情生成模块模拟雷达探测到的目标运动数据,通过跟踪算法对目标实施跟踪处理,估计目标运动状态,实时地在演示界面上显示目标运动信息和跟踪性能评估结果,为机动目标跟踪算法研究搭建了一个具有较高可信度的、直观的仿真系统。
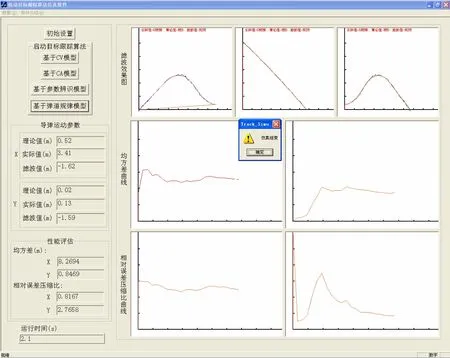
图7 基于弹道规律的机动目标跟踪算法仿真实例
:
[1]赵敏. 机动目标跟踪理论的研究及其应用[D]. 西安: 西北工业大学, 2006.
[2]朱志宇, 姜长生, 张兵. 多传感器多机动目标跟踪方法研究进展[J]. 现代防御技术, 2005, 33(5):60-66.
[3]张树春, 胡广大, 刘思华. 跟踪弹道目标的几种次最优滤波器[J]. 系统仿真学报, 2005, 17(3):601-603.
[4]Farina A, Ristic B, Benvenuti D. Tracking a ballistic target: comparison of several non-linear filters[J].IEEE Trans. Aerospace and Electronic Systems(S0018-9251), 2002, 38(3): 854-867.
[5]求是科技. Visual C++ 6.0数据库开发技术与工程实践[M]. 北京: 人民邮电出版社, 2004.
[6]石章松, 周丰, 孙世岩. 目标跟踪与数据融合理论及其应用[M]. 武汉: 海军工程大学, 2007.
[7]李现勇. Visual C++ 6.0串口通信技术与工程实践[M]. 北京: 人民邮电出版社, 2002.