基于脑电与肌电对中风偏瘫病人肌肉能力恢复研究的进展
2010-08-07张冬晔何山曾珍
张冬晔,何山,曾珍
(北京工业大学 生物医学工程中心,北京 100022)
1 肌电信号与运动康复治疗
1.1 神经肌肉电刺激
肌肉疲劳在生物力学意义上被定义为肌肉不能保持预期的力输出[2]。在神经系统控制下的整个肌肉的表现可能被各种因素所影响,如被试者的不愿配合;神经冲动无法传导到肌肉;肌膜失活等等[3]。肌电(EMG)对判断与评价个人体内肌肉的疲劳很有帮助。根据BASmajian 和 DeLucas 的研究,肌肉疲劳是以肌电谱密度的变化为标称的,疲劳时谱密度会下降,与此同时,肌电增益会增加或者保持不变[4]。这些肌电信号在疲劳时的特征作为疲劳指标被广泛应用在运动医学上,用于神经-肌肉康复治疗和神经-假肢设备的控制。 然而目前有关肌电在疲劳时特性的知识仅仅是以分析正常肌肉为基础的,只有很少的研究包含了由于中风引起的肌肉瘫痪病人的肌电疲劳特征。
了解正常被试者和患有肌肉瘫痪被试者的疲劳肌电特征的不同之处是十分重要的,因为这是肌电技术在中风康复治疗中广泛应用的先决条件。 在中风后瘫痪的肌肉处于特定疲劳状态与正常肌肉处于同种状态下的比较证明了这种不同的存在。
综上所述:针对肌肉治疗的神经肌肉电刺激( Neuromuscular Electrical Stimulation, NMES)是近年来在偏瘫康复治疗中应用较广泛的方法之一。在临床上,可直接利用神经肌肉电刺激, 来刺激患肢体表或与之相对应的周围神经, 通过刺激突触前膜对肌梭反射的抑制作用,增强肢体的肌肉力量,提高患者的运动功能和日常生活动作能力[5]。
1.2 生物反馈技术
生物反馈技术( biofeedback techniques)是指应用电子仪器, 将人们正常情况下意识不到的身体生理活动和生理功能( 如肌电、肌张力、血压等)变化, 转变为可以被人感觉到的信号, 如声音、图像等, 再让患者根据这些可感觉到的信号学会在一定范围内通过意识调控内脏器官或机体的活动, 纠正偏离正常范围机体功能的一种治疗方法,目前在临床上以表面肌电生物反馈在脑卒中后偏瘫中的应用最为成熟[7]。据研究表明,生物反馈技术能够为触觉、关节活动提供适当的、具有远侧反射性感觉的系统,对假肢的人性化适应性能的提高具有重要的提升意义。这个系统同时也会以一种更自然、易控制的方式提高假肢的功能[6,7]。
1.3 肌电诱发的神经肌肉电刺激
随着科学技术的发展, 将神经肌肉电刺激与肌电生物反馈技术结合, 产生了一种新的治疗方法——肌电诱发的神经肌肉电刺激(Electromyography- triggered Neuromuscular Stimulation)。 在肌电诱发的神经肌肉电刺激的治疗过程中,治疗仪产生的电刺激帮助患者完成整个全关节的腕背伸运动,即将这个动作放大到使患者能够很明确地看到或感觉到的幅度, 肌肉活动的可视信号特点和有关肌肉收缩的程度、速度等信息的神经冲动编码一一对应, 在破坏了的运动调控系统中形成了一个外在的反馈环路, 从而加强和恢复了内在环路中的随意运动模式中感觉与运动的相互作用,从而完成了整个感觉运动生物反馈过程。可以认为这种治疗方法是能够加强或重建本体感觉的生物反馈系统, 可以使相关信号返回到皮质感觉中枢中, 建立新的感觉运动反馈系统, 从而代替原来受损神经元产生的错误信息[8]。
1.4 功能性电刺激
功能性电刺激(Functional Electrical Stimulation, FES)作为一种安全、有效的治疗方式, 目前正逐步应用于临床辅助治疗肌肉神经功能性疾病。
1.5 肌电信号在控制假肢方面的发展
人手是人类赖以生存和劳动的最复杂、最精细的工具,因此人手的假肢研究对于帮助病人更加方便的生活有着极为重要的意义。随着微电子技术的进步及微型计算机的出现,肌电控制假手逐渐成熟并得到了广泛应用[9]。肌电控制假手的信息源是残肢残存的肌肉群,通过残肢肌肉表面的电极检测出肌电信息,进行募集放大、识别处理,控制假肢,原理如图1所示。
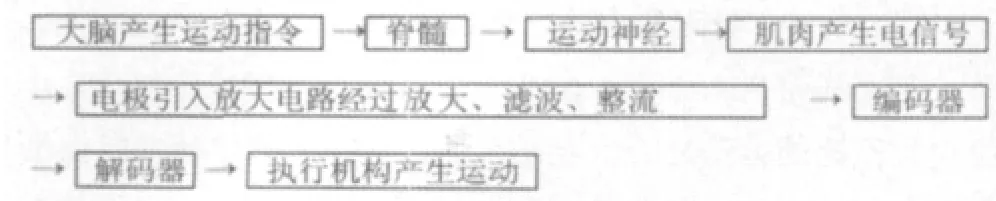
图1 肌电控制假肢原理图
目前,随着人们生活水平的提高,对假肢仿生性能的要求也越来越高[10]。肌电假手中最高水平的是德国OttoBock 公司推出的自动SUVA 感应假手, 这个假手可以通过肌电信号的强弱来控制手的张合速度, 并可以控制抓取物体力度的等级。我国清华大学利用有机压电(PVDF)薄膜制作的传感器,研制了一种具有触滑觉反馈功能的肌电假手,这种触滑觉传感器不仅很薄,可以像皮肤一样粘贴在假手的手指表面, 而且利用物体滑动引起点阵状表皮振动产生的交变压电信号,可以进行实时监视和反馈。安装有这种触滑觉传感器的假手,克服了传统假手的弊端, 提高了仿生性能。
人的肢体动作是由大脑、神经、肌肉活动协同完成的结果,而表面肌电信号(surface electromyography,sEMG)是伴随肌肉活动的生物电信号在体表的展现,其中蕴含了丰富的肢体动作信息,表面肌电信号的研究对探究肢体肌肉运动有着重要意义[11]。目前市场上的大多数假肢主要是通过拾取截肢者残端的一对拮抗肌(如腕伸肌和腕屈肌)的sEMG来控制假手驱动电机的正反转,实现假手的张开和合拢[12]。虽然在2000 年后,多自由度肌电假手的识别率已经达到85%以上,但由于仍然存在一定的误识率,离实用尚有一定距离。
2 脑电信号与康复治疗
2.1 中风后脑电信号
大脑一侧半球中风,尤其是高血压性脑出血可导致脑水肿,可压迫脑干。中风早期,脑缺血、缺氧使神经细胞膜电位发生变化,出现过度除极化;急性期颅内压增高,影响了神经元的正常电生理活动。由于应激反应使机体内有关激素水平发生改变以及血液电解质酸碱平衡的破坏等可能引起痫性放电,所以脑组织缺血、缺氧及病变亦可直接刺激局部神经元引起癫痫发作[13]。
2.2 脑电信号的应用
2.2.1 脑电信号的提取与假肢控制。脑电信号(Electroencephalograph)的提取,目的是为了从复杂的背景噪声中提取出隐含或微弱的脑电特征。因为临床实践表明, 脑电信号中包含了大量生理与疾病信息, 所以通过对脑电信号的处理, 不仅可以为医生提供临床诊断依据, 而且可以为某些脑疾病提供有效的治疗手段, 同时也常应用于假肢控制和脑认知科学方面的研究[14]。
虽然肌电信号作为假肢的信息源在前臂假肢研究领域中已广泛的使用,但由于长期中风或者瘫痪没有得到较好的康复护理而导致肌肉萎缩时,肌电信号就不能提供足够的肌电控制信息,值得注意的是,肌肉的疲劳、电极位置的改变、体能波动等也都会使肌电信号的特征值发生变化,造成控制准确度难以提高。 然而神经的电生理活动不受人体疲劳程度的影响,而且重复再现性高、传递时彼此之间互不干扰,所以利用神经活动控制假肢具有一定的优势[14]。
近年来,在事件相关电位(Event-Related Potential,ERP),以及在诱发脑电位方面的相关研究(An event-related brain potential)[15]已经引起了国内外的关注。其中的P300作为一种认知相关的脑诱发ERP的内源性成分,在记录时不需要太多的叠加次数就可以出现,在临床上广泛适用于假肢的应用中[15],引起P300电位至少需要两种刺激,将刺激随机编成刺激序列。其中需要受试者注意并加以辨认的刺激是靶刺激事件,即Target Stimulus(TS)。TS为小概率事件,将TS映射到机械手的运动,受试者在注意并辨认多种刺激事件中的某一种时会引起P300波,其可以作为机械手的控制信号。如果增加刺激事件,则会实现多自由度机械手的控制。
但总体而言,在神经控制假肢的研究中,国内外对智能控制的假肢应用还不多见, 基本上是基于理论和仿真研究。理论研究大多集中在模糊控制、神经网络、专家控制、分层多级控制等智能控制方法[16]。下面将介绍脑电控制的一个重要发展——脑机接口的研究。
2.2.2 脑-机接口——脑电信号的重要应用。对严重神经或肌肉伤残患者来说,直接用大脑去控制装置是不可能的, 但是近年来随着脑科学、计算机科学、信号处理技术的飞速发展以及残疾患者的需求意识的不断提高, 一项被称为BCI脑-机接口的技术正在逐步使得人类利用脑电信号同计算机或其他装置进行通讯成为可能。脑-机接口技术是人脑与计算机或其他电子设备之间建立直接的交流和控制通道。通过这种通道, 人就可以直接通过脑来表达想法或操作其它设备, 而不需要通过语言或肢体的动作, 是一种全新的通讯和控制方式。这对肢体残缺的人来说有着极其重要的意义[17]。对由于偏瘫肌萎缩性的患者或者脑瘫的人们,BCI(Brain-Computer Interface)技术可以帮助患者恢复控制和交流功能[18]。
脑-机接口中主要使用的是视觉诱发电位(Visual Evoked Potential. VEP),根据刺激信号频率的不同,VEP 又可以分为瞬态诱发电位和稳态诱发电位(Steady State VEP.SSVEP),其中,SSVEP 经过专门的信号处理可以提取出稳健的信号特征,可以作为脑机接口的输入信号[19]。
脑-机接口系统的组成:脑电信号通过电极从头皮或颅内获得, 经信号处理提取反映使用者意图的信号特征并转化为控制外部设备的指令。
脑-机接口中,运用脑-机接口原理设计康复辅助机械手控制系统可以为多自由度假肢、外动力矫形器、护理机器人等运动康复辅助器械的使用提供新的技术和思路。该技术如图2所示。引入新的控制信号输入量,即由脑电信号提取出和识别出控制指令,送入PLC运动控制单元,最终形成基于脑机接口的机械手闭环控制系统[20]。
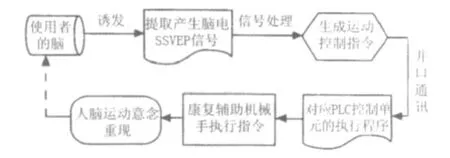
图2 脑-机接口
在脑-机接口的研究中,Byron P. Olson利用大脑皮层闭环控制对轮椅方向的控制进行了实验,在第一天试验时,平均成功率为78%,而在连续练习几天后平均成功率超过了90%[21]。
以上所介绍到的脑-机接口技术都是旨在利用计算机帮助肢体功能残疾人和外部环境之间建立起一个直接的交流通道, 它在康复工程领域中应用前景是相当广阔的。但目前的发展还是处于一个比较初级的阶段[22]。
3 从EMG-EEG的结合到中风的康复治疗
3.1 Biomove3000中风肌肉恢复治疗仪
通过对肌电控制、脑电控制的介绍,可以了解到我们可以分别通过脑电和肌电的运用对康复治疗起到辅助和恢复的作用。人体作为一个有机的生物体,其各个功能是相互联系密不可分的,在中风治疗和恢复中,引领前沿的是将肌电和脑电结合起来的方法。
肌肉运动是由脑部的电冲动引起的,通过神经细胞传递到肌肉。在中风之后,在伤残肌肉上检测出极其微小的肌电信号可以引起对同一肌肉的电兴奋冲动,从而导致真正的肌肉运动。当人体想要引发肌肉运动时,大脑会传递电信号给肌肉,该电信号一到达,肌肉就产生相应响应,这种电信号可以被检测出来——肌电信号。但大多数的情况是,很多病人没有自发恢复性,而且伴有严重的肌肉萎缩和肌肉瘫痪,这在很大程度上影响病人的正常生活[23]。
一种新型设备能够帮助脑卒中患者大脑某部分重新学习去激活或者重新学习自发性地控制肌肉。本系统能够检测脑中风后持续瘫痪肌肉极其微小的肌电(EMG)信号,并且使用这些微小信号启动传导至肌肉的电刺激脉冲,患者从而产生真实的肌肉运动。
但残余肌电图信号通常非常微小,不足以控制肌肉。如果由于脑中风的损害而大脑不能产生规则电脉冲,或者电刺激不能传导至肌肉,身体就不会发生正常的肌肉收缩。这就会导致不可逆转的损害以及肌肉功能的丧失,导致瘫痪,产生爪型手以及下垂足等。
但在几乎所有脑中风病例中,仍然有非常少量的电刺激能够传导至肌肉。放置在瘫痪肌肉上的贴附电极能够检测到少量残余肌电信号。 Biomove设备能将这些微小信号放大,当达到内部预置触发水平的时候,嵌入式刺激器将电刺激回传给相同的肌肉。然后这些肌肉就可以像患者自己大脑信号“指导”一样作出反应。
3.2 自动肌力训练仪
在经过Biomove3000恢复治疗,肌肉功能逐渐好转的基础上,可以采用自动肌力训练仪。患者的站立、行走功能障碍主要与肌张力障碍、平衡功能障碍和下肢肌力低下有关。患者可以采用自动肌力训练仪进行治疗,从而须提高下肢肌力,降低肌张力[24]。自动肌力训练仪能智能探测各种痉挛,它通过定性定量性的控制运动训练的速度和阻力,减少痉挛的发生,提高肌力,增强身体协调性和灵活性,保持身体行动能力,使上下肢变得灵活,加强了上下肢的分离运动能力。德国科学家日前开发出一种新型康复机器人,能帮助中风患者锻炼下肢,早日恢复行走。这种机器人名为“触觉行走者”,研究发现,尽管重力作用在人体形体上的身体轴线有很大的影响,但是中枢神经系统依然在运动系统中起到非常重要的作用[25]。
3.3 其他发展探究形式
中频电治疗能明显促进局部血液和淋巴循环,可使皮肤温度上升,小动脉和毛细血管扩张,从而锻炼骨骼肌,软化瘢痕和松解粘连的作用,在维持正确姿位的前提下,依次在卧位、坐位及站位进行躯干和四肢基本运动和功能性活动,重新学习掌握正确的运动模式[26]。另一种基于ARM/Linux的便携式脑卒中综合康复治疗仪,该治疗仪以生物反馈法为基础,以肌电触发的神经肌肉电刺激(EMG-Triggered-NMES)为主要治疗手段,以小脑顶核电刺激(FNS)为辅助治疗手段,能够对脑卒中患者运动功能的恢复、脑神经的保护以及卒中后抑郁的治疗起到积极的作用,为患者全面康复提供一种新的康复治疗设备[27]。肢体限制-诱导运动疗法,顾名思义,就是限制活动能力较好的一侧肢体,从而强制性地使功能差的一侧肢体多活动,以此改善其功能,能够提高中风患者的肢体功能康复。由于研究所知脊髓的运动神经元控制随意运动和恢复效果,所以还可以通过技术器械被动运动模仿脊髓运动输出从而刺激随意运动[28]。
4 总 结
通过对肌电、脑电以及中风治疗的学习,我们认为目前肌电与脑电的研究发展都有了一定的进步,而治疗中风、瘫痪等病患时,往往需要二者的结合。虽然中风治疗依然是世界难题,但目前其CT抢救方案已取得进步[29]。中风后康复的原则是越早越好,但康复训练不应过度[30]。它不单是药物医疗器械的治疗, 而是把药物治疗与肢体康复、心理康复、语言训练、健康教育和生活指导结合起来[31]。康复辅助器械的研究不仅要结合机体特点,更应具有人性化的特点。
[1]魏建功.浅述脑卒中的中西医结合诊断与治疗[J].甘肃医药,2008,27(3):38-39.
[2]Edwards RHS.Human muscle function and fatigue[M].//Porter R,Whelan J.Human Muscle Fatigue Physiological Mechanisms.London:Pitman,1981:1-18.
[3]Gandevia SC, Allen GM, McKenzie DK. Central fatigue:criticalissues, quanti cation and practical implications[J]. Adv Exp Med Biol, 1995,384:281-294.
[4]John V. Basmajian, Carlo J. De Luca. Muscle alive: their functions revewled by electromyography,1962,44(6):1272.
[5]郑萍,纪树荣.肌电诱发的神经肌肉电刺激在偏瘫康复治疗中的作用[J].中国康复医学杂志,2006,21(9):854.
[6]Gurpreet Singh Dhillon, Kenneth W. Horch. Neural Sensory Feedback and Control of a Prosthetic Arm[J]. IEEE Trans Neural Syst Rehabilitation Eng,2005,13(4):468-472.
[7]Alejandro Hernández,Ryu,Hiroshi,et al. An fMRI Study on the Effects of Electrical Stimulation as Biofeedback[C].Beijing:2006 IEEE/RSJ International Conference on Intelligent Robots and Systems,2006:4336-4342.
[8]Emken J.L.,Reinkensmeyer D.J.Robot-Enhanced Motor Learning:Accelerating Internal Model Formation During Locomotion by Transient Dynamic Amplification[J].IEEE transactions on neural systems and rehabilitation engineering,2005,13(1):33-39.
[9]郑修军,张键,陈中伟,等.肌电假手的研究现状[J].中国康复医学杂志,2003,18(3):168-170.
[10]姜明文,王人成,罗志增,等.具有触滑觉功能的肌电假手[J].清华大学学报(自然科学版),2004(8):1051-1053.
[11]Hyun Kyoon Lim Lee, D.C.McKay, W.B.Protas, etal.Analysis of sEMG During Voluntary Movement—Part II: Voluntary Response Index Sensitivity[J].Neural Systems and Rehabilitation Engineering,2004, 12(4):416-421.
[12]Kallenberg L.A.C.,Hermens H.J.. Behaviour of a surface EMG based measure for motor control: Motor unit action potential rate in relation to forceand muscle fatigue[J]. Journal of Electromyography and Kinesiology,2008,18(5):780-788.
[13]王国珍.中风后癫痫的脑电图头颅CT与临床分析[J].浙江临床医学,2002,4(4):255.
[14]姜波,朱林剑,孙守林.脑电信号控制上肢假肢的研究现状中[J].康复医学杂志,2005(3):216-217.
[15]Yan Fan a,b,Shihui Hana,b.Temporal dynamic of neural mechanisms involved in empathy for pain: An event-related brain potential study[J]. Neuropsychologia, 2008(46):160-173.
[16]喻洪流,关慎远,钱省三,等.膝上假肢的智能控制方法[J].中国康复医学杂志,2008,23(2):145-147.
[17]沈敏.脑-机接口技术综述[J].重庆邮电大学学报(自然科学版),2007,S1:153-156.
[18]BIRBAUMER N. Rain man's revelations[J].Nature,1999(20):211-212.
[19]程明,任宇鹏,高小榕,等.脑电信号控制康复机器人的关键技术[J].机器人技术与应用,2003(4):45-48.
[21]Byron P. Olson, Jennie Si, Jing Hu. Closed-Loop Cortical Control of Direction Using Support Vector Machines.IEEE TRANSACTIONS ON NEURAL SYSTEMS AND REHABILITATION ENGINEERING, 2005, 13(1): 72-80.
[22]郑福辉,江国泰,王皓.人-机接口技术在残疾人功能辅助方面的开发与应用[J].中国康复医学杂志,2006(9):827-828.
[23]Amjo Corp.Biomove3000-LtrSizepdf[EB/OL].[2009-11-15].http://www.mystroke.com/downloads/Biomove3000-LtrSizepdf.pdf.
[24]Liang CC,Chang SD,Lai SL,et al.Stroke comp licating p regnancy and the puerperium[J].Eur J Neurol, 2006,13:1256-1260.
[25]Anne B. Le Seac'h Joseph McIntyrea. Multimodal reference frame for the planning of vertical arms movements[J]. Neuroscience Letters, 2007,423(3):211-215.
[26]刘静.中频电治疗结合良姿位治疗中风瘫痪肢体的疗效分析[J].中国现代实用医学杂志,2008,7(8):52.
[27]葛国庆.基于嵌入式的脑卒中康复治疗仪软件系统的研究[J].生物医学电子与信息技术,2008,24(32):93-95.
[28]D. Liebermann, A. Buchman, I. Franks. Enhancement of motor rehabilitation through the use of information technologies.Clinical Biomechanics, 2006,21(1):8-20.
[29]师延路.ECR 2009掠影.中国医疗设备,2009,24(4): 145-146.
[30]高览,侯威生.中风康复训练不要过度[J].健康文摘,2008(10):47.
[31]虞乐华.美国医生怎么做——解读美国2005年“中风康复指南”[J].家庭医药,2006(1):46.
