基于ArcEngine的林火视频监测定位系统
2010-07-31刘龙申沈明霞何瑞银许水燕丛静华
刘龙申,沈明霞,何瑞银,许水燕,丛静华,汪 东
(1.南京农业大学,江苏 南京 210031;2.南京森林公安高等专科学校,江苏 南京 210046)
由高斯-克吕格投影平面直角坐标反解地理坐标的方法[8]计算出A、B两点的地理坐标,从而计算出火点F的经纬度。
随着信息技术的发展,林火视频监测逐渐取代了早期人工值守瞭望塔的林火监控手段。无线扩频网络技术和网络视频监控技术的运用,地理信息系统的发展,这些软硬件条件的技术进步,使得林火定位问题的解决有了技术支撑[1]。在此基础上实现的林火定位将为森林防火决策部门提供关键的火点位置信息,提高灭火的效率,减少火灾损失。
我们基于ArcEngine和数据库技术,设计了林火视频监测定位系统 (监测点、无线传输系统、林火识别定位系统)。应用基于DEM数据和数字云台角度的定位方法,实现了二维地图、三维模型和摄像机联动,发现火情时林火的准确定位。
1 林火动态监测与定位系统设计
1.1 系统总体设计
系统由监测点、无线传输系统和林火识别定位系统组成。单个监测点的系统硬件结构如图1所示。

图1 系统的总体结构
监测点由摄像机和数字云台组成。摄像机的视频信号和实时角度通过视频服务器由无线传输设备传输至监控中心;来自监控中心的控制信号经过无线传输系统传输到视频服务器,通过视频服务器、数字云台解码器实现对变焦镜头、云台的控制。
监测点的选址要考虑地形、地貌,同时应该使整个观察网在所保护的区域内有最大的视野,以保证及时发现正在发生的火灾,确定火灾位置[2]。系统基于地理信息系统 (GIS)的可视性分析方法,以内蒙古白狼林区为研究对象,通过对坡向、坡度、海拔、林班等数据的空间分析,确定了林火视频监控点的合理建设位置。
1.2 系统软件设计
系统以VS2005(C)和ESRI的二次开发组件ArcEngine为开发平台,实现地理信息系统的基本功能、数据库操作、林火自动定位以及二维地图、三维模型和数字云台的联动。
ArcEngine提供的组件和工具集,由ArcEngine DeveloperKit和 ArcEngine Runtime 组成[3],它能够实现二维地图操作功能,还能够实现三维展示、三维分析等高级功能。软件整体架构如图2所示。
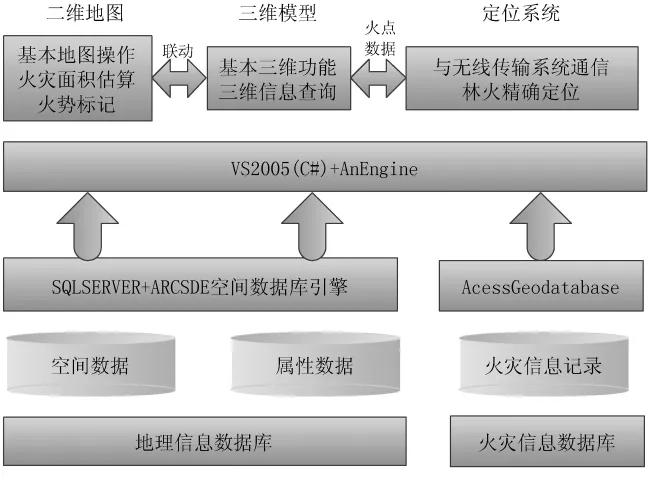
图2 系统软件的整体架构
1.2.1 二维地图功能开发
该系统二维部分采用 ArcEngine的MapControl控件和PageLayoutControl控件开发。系统读取地理信息数据库中的二维地图数据,通过数据库引擎在MapControl控件和PageLayoutControl控件中显示。
二维部分功能有地理信息系统的基本功能、火点标识功能、火灾面积估算、最佳路径分析。
1.2.2 三维模型功能开发
三维部分采用 SenceControl控件和PageLayoutControl控件开发实现。系统读取地理信息数据库中的三维模型和DEM数据,通过数据库引擎在 SenceControl控件和 PageLayoutControl控件中显示。
三维部分能够直观反映当地的地形地貌,主要功能有三维模型的基本操作功能、坡度提取以及与二维地图和摄像机联动。
1.2.3 定位系统
林火定位有单点定位、双点定位和多点定位3种定位方法。单点定位是基于单个瞭望塔实现定位,根据DEM数据、瞭望塔海拔高度和摄像机的水平角、旋转角,计算摄像机视频窗口的中心线与地面的交点[4]。
考虑到科研成本和课题经费问题,要用最少的监测点监测最大的区域,本系统采用的是单点定位方法。主要研究提高单点定位精度的算法。
1.2.4 数据库
本系统的数据库主要由地理信息数据库和火灾信息数据库两部分组成。空间信息数据库存放地理信息的空间数据和属性数据;火灾信息数据库用来自动存放森林火灾记录,包括发生时间、火点经纬度、人工审核等,以便用户查询火灾历史记录。
系统软件采用扫描方式不断读取监测点数据,包括视频和摄像机的角度,利用火情识别模块对视频进行处理,分析是否有火情,如果有火情发生则进行报警和林火定位,摄像机也暂时把镜头停留在火点位置;否则二维地图、三维模型和摄像机联动。软件流程图如图3所示。
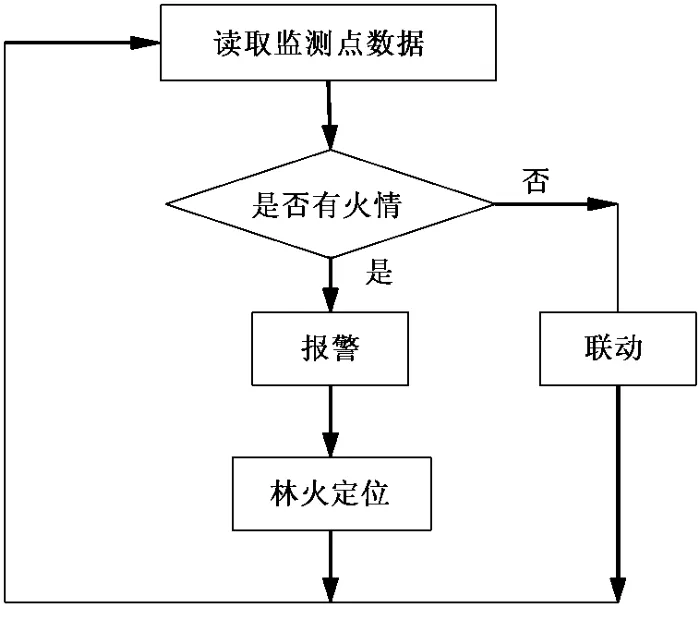
图3 系统软件流程图
2 林火定位算法研究
2.1 单点定位方法的研究
如果火点定位精度要求较高,则可以真正利用三维监控角度数据和三维 GIS数据另辟蹊径[5-6]。单点定位就是已知瞭望塔的海拔高度和摄像机的角度,结合DEM数据,求目标点的经纬度。
单点定位的基本思路如图4所示。

图4 单点定位的基本思路
单点定位具有监测覆盖区域广,能够在三维空间进行火点定位的优点,但由于仅局限单个瞭望塔观测的方位角和水平角数据就必须借助电子地图。这种方法的理论定位误差主要取决于穷举搜索密度和GIS数据精度。单点定位数学模型如图5所示。
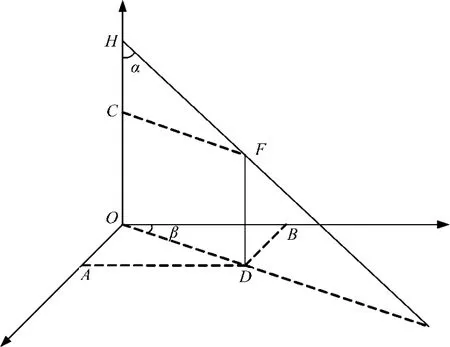
图5 单点定位的数学模型
由渐进穷举法[7]可得火点F的高度为 FD,已知瞭望塔的经纬度为 (x,y),海拔为 HO,摄像机的旋转角为β,水平角为α,由图5得:

由高斯-克吕格投影平面直角坐标反解地理坐标的方法[8]计算出A、B两点的地理坐标,从而计算出火点F的经纬度。
2.2 摄像机角度的校正
实际定位误差除与上述定位算法有关外还与地图测绘精度、数字云台角度机械偏差、实时气象条件、地理坡度各异性等因素密切有关,特别是水平角的细微偏差对最终的定位结果会产生较大影响。为了减小单点定位的误差,须对摄像机的水平角α和旋转角β进行校正。在单点定位数学模型中,当α=90°,0°<β<360°时摄像机要绝对水平,当 β=0°时摄像机要朝向正北方向。
目前对摄像机水平角的校正多采用水平仪,然后对瞭望塔上的云台支架进行调整,难度较大,成本较高;对摄像机旋转角的校正多采用指南针,受云台电机中磁场干扰很大。采用这2种方法对摄像机角度的校正都存在很大误差。本系统在不改变云台支架等硬件结构的前提下,利用GPS和 GIS对摄像机角度进行校正,对角度误差进行补偿,节约施工成本,效率高,提高了定位精度。
2.2.1 水平角的校正
在实际应用中,摄像机和云台的安装很难达到理想水平位置。摄像机扫描一周所确定的平面与水平面会有一个夹角,导致监测点回传的水平角与摄像机实际的水平角之间存在一定偏差,而且该偏差随着旋转角的变化而变化。
假设摄像机扫描一周所确定的平面与水平面之间的夹角为θ,监测点回传的水平角与摄像机实际的水平角之差为γ,已知摄像机的旋转角为β,水平角校正的数学模型如图6所示。

图6 水平角校正的数学模型
由图6可得:
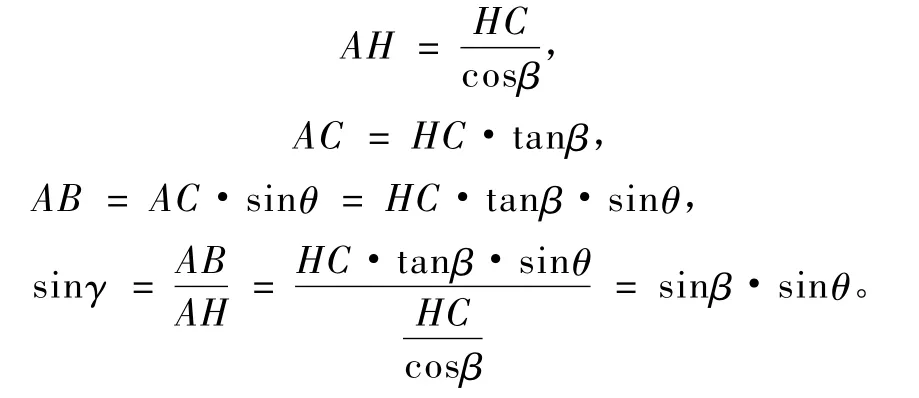
式中θ是一个未知的常数,可通过代入一个初始值计算出。假设一个目标点P,使摄像机视窗中心线对准 P,监测点回传的摄像机水平角为 α’,利用GPS测定P点的经纬度 (x,y),已知摄像机H点的经纬度和高度,在GIS中计算出摄像机实际的水平角α,可得:

2.2.2 旋转角的校正
在地理信息系统中,在瞭望塔的正北方向选定一个目标点P,使摄像机视窗中心线对准P,此时摄像机实际的旋转角应该为0,监测点回传的摄像机旋转角β′即为旋转角的误差值。
3 系统实现及试验结果
利用内蒙古白狼林区三广山进行了施工试验。测得三广山瞭望塔的经纬度 (x1,y1)为(120°13′15.30″,46°97′19.97″),海拔为1 400 m,塔高为15 m。在摄像机的监测范围内选择了4个试验点分别进行了放火试验,系统自动识别出火点并进行定位,定位结果如图7所示。

图7 定位试验的结果
利用公式和高斯-克吕格投影平面直角坐标反解地理坐标的方法,分别定位出放火试验点的经纬度坐标 (表1)。
利用GPS测得放火试验点的经纬度坐标如表2所示。

表1 系统自动定位出的试验点经纬度
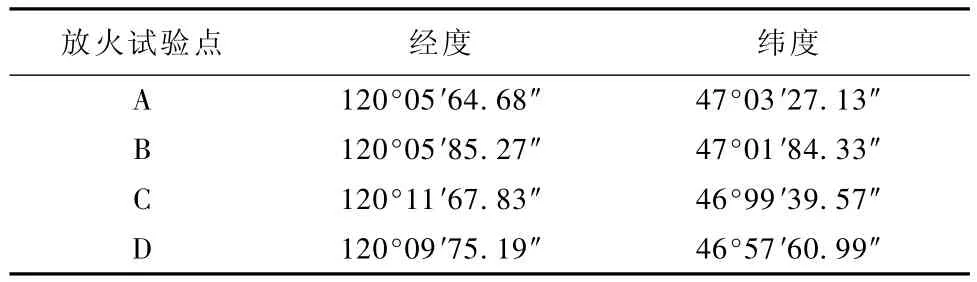
表2 GPS测出的试验点经纬度
比较系统自动定位试验结果和GPS测得的放火试验点经纬度坐标,考虑到GPS定位误差,经纬度误差大概为8″,距离误差约为350 m。
4 小结
利用ArcEngine和数据库技术,设计了林火视频监测定位系统,并选择在内蒙古白狼林区进行了初步试验,试验结果表明:系统适用于可见光下森林防火视频监测系统,实现了林火定位,为森林防火决策部门提供关键的火点位置信息,提高灭火的效率,减少森林火灾损失。
本系统对将林火监测系统单点定位进行了初步探索,实现了主要的功能。但是,对于本系统在大范围森林防火视频监测工程中应用,还需对单点定位算法在摄像机防抖功能上做进一步研究,以减少瞭望塔在风力作用下摆动带来的定位误差;对双点定位和多点定位算法做进一步研究,以减少远距离单点定位存在的误差。
[1]姚树人,韩焕金.中国森林防火现状及其对策的研究 [J].森林防火,2002(4):14-16.
[2]张健,刘毅,韩宁,等.鹫峰国家森林公园林火视频监控点的选址 [J].东北林业大学学报,2009,37(5)24-27.
[3]Zhu Shijie, Nan Zhuotong. Building GIS framework with arcengine [J].Remote Sensing Technology And Application,2006,21(4):385-390.
[4]王元园.基于GIS的森林火灾视频监控自动定位技术研究[D].北京:北京林业大学,2008.
[5]杨铁军,张瑞.使用单点定位误差补偿提高姿态测量精度[J].系统工程与电子术,2006,28(6):907-910.
[6]张小红,刘经南.基于精密单点定位技术的航空测量应用实践 [J].武汉大学测绘院,2006,31(1):19-22.
[7]李红,彭方.穷举式搜索算法及其应用 [J].福建电脑,2007(5):34-35.
[8]刘健,刘高峰.高斯-克吕格投影下的坐标变换算法研究[J].计算机仿真,2005(10):119-122.
