基于和差波束的三维ISAR成像技术
2010-07-30全英汇邢孟道黎海林李亚超
李 军 全英汇 邢孟道 黎海林 李亚超
(1.西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071;2.北京跟踪与通信技术研究所,北京100094)
1.引 言
基于单天线的逆合成孔径雷达(ISAR)成像技术目前已发展较为成熟,针对非合作目标的不同运动状况,提出的各种成像算法如距离多普勒算法[1]、距离瞬时多普勒算法[2]、Radon-Wigner滤波反投影成像算法[3]等在实际数据处理中取得了较好的成像结果。随着高分辨成像的进一步发展及实际应用需求的增长,需要准确获取目标的三维信息,即对目标进行三维成像并对目标尺寸进行定标。传统的单天线ISAR方位为多普勒,不代表具体物理尺寸,无法满足上述应用要求,需要研究其他体制的成像雷达。
近年来,利用和差波束对目标进行三维测量成为各国研究的热点,通过和差波束测角跟踪机动目标同时对其进行定标。传统的单脉冲测角对象为单次回波的一维距离像,一般采取比幅法测角或者比相法测角[4]。该方法实时性好,算法较为简单,对系统要求较低。但随着大带宽高分辨雷达的发展,此方法无法分离同一距离单元的多个散射点,降低了该算法的有效性。基于ISAR成像方法的和差波束测角根据多普勒的不同可以分离相同距离单元的散射点,同时完成目标定标。首先利用ISAR成像方法进行成像,然后在图像配准的基础上利用幅度或者相位信息进行测角,最后利用三维合成获得目标三维坐标信息。文献[5-6]从理论上讨论了此方法的可行性,通过模型仿真验证了理论的正确性。但由于条件的限制,所提出的方法没有经过实测数据的验证。
本文从理论上分析了成像模型及成像方法,以国内首批实测数据为基础,分析了实测数据的特点,根据该特点提出了一套三维ISAR成像方法。和差波束测角跟踪目标时信号形式一般为多通道的和与差,相位干涉法所需的单个独立通道在实际工程中不易得到,这里考虑直接采用和差信号对ISAR像素点进行比幅测角。通过实际单个散射点目标及飞机目标的三维成像验证了方法的正确性及可行性。文中对常规单脉冲测角结果及本方法结果进行了对比,说明本文方法具有一定的优越性,为实际运用提供了一种可行性的实现方法。
2.三维ISAR成像模型及算法
2.1 ISAR三维成像模型
ISAR成像以旋转目标为基础,距离像根据信号带宽进行分辨,方位向利用各散射点多普勒的不同对同一距离单元散射点进行分离。
和差波束利用天线方向图权值及相位信息对目标进行测角,以双天线和差波束对机动目标观测时的成像为例,模型如图1所示。
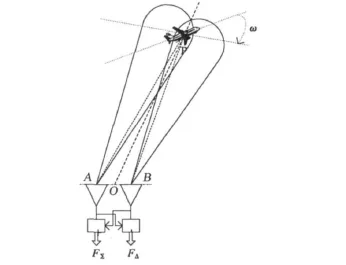
图1 和差波束测角及ISAR成像示意图
ISAR雷达系统一般采用解线频调接收方式,假设雷达发射波形为线性调频信号,信号波形如下

假设单散射点目标P与雷达距离为Rp,则雷达接收信号为
单脉冲测角实时跟踪雷达系统中一般采用多个通道的和与差,以图1水平两天线为例,发射天线等效波束中心与雷达AB交点为图1中O点,则雷达A、B与散射点P距离分别为

以天线A为例,经解线频调后输出信号形式为
目标的运动导致雷达跟踪的距离处于时变状态,且雷达参考距离以真实值存在偏差,故方位处理前回波的包络及相位均需补偿。
在转台模型条件下,若目标旋转速度很小,散射点与雷达之间的距离可近似为

式中:Rp0为散射点旋转中心和雷达距离与目标参考距离之差,方位直接傅立叶变换即可得到目标ISAR像
2.2 干涉ISAR三维成像算法
干涉ISAR即可通过比幅法测角实现定标,也可以利用相位干涉法定标。比幅法测角适用距离较近,而相位干涉方法适用距离较远。实际雷达系统采用测角法跟踪目标,信号形式为多通道的和差波束形式。相位干涉法三维成像所需的单个独立通道有时无法得到。这里考虑直接利用信号振幅进行处理。后续工作将进一步讨论利用相位进行干涉ISAR成像,这里不再讨论。
振幅和差单脉冲雷达利用和差比较器得到和差波束,和信号用于跟踪目标并测距,差信号用于测量目标偏离主波束角度。设两波束相对天线轴线偏角为δ,对于偏离天线轴线角方向的目标,和振幅为

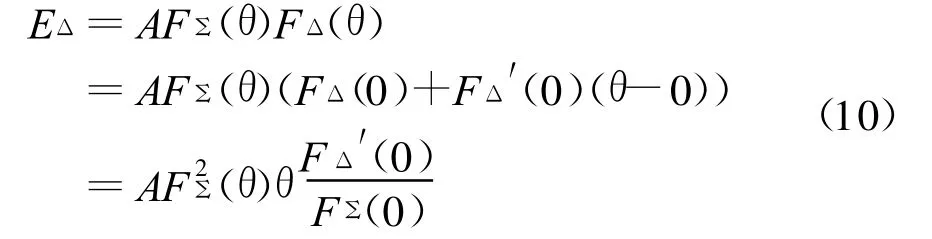
利用和与差的幅度相比

式中:K为比例系数,可见目标偏离天线轴线较小时,差和信号振幅比与目标误差角θ成线性关系。差信号的相位则表明了目标偏离天线轴线的方向。
传统单脉冲测角雷达一维距离像同一距离单元中存在多个散射点,导致测角存在误差,最终影响三维成像质量。为了减小多散射点混叠的影响,首先利用ISAR成像原理对同一距离单元散射点进行多普勒分离,然后在和差信号ISAR成像基础之上采用像素点比幅法测角,最后完成散射点定标及三维成像。
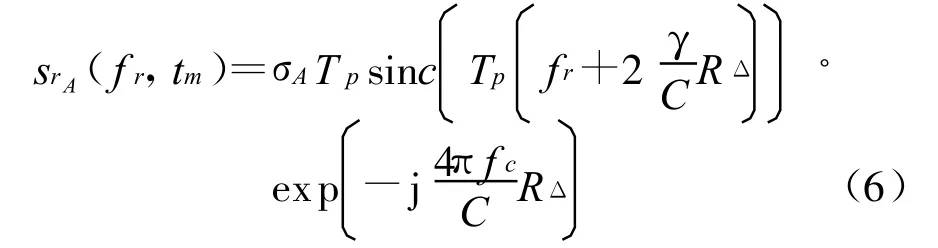
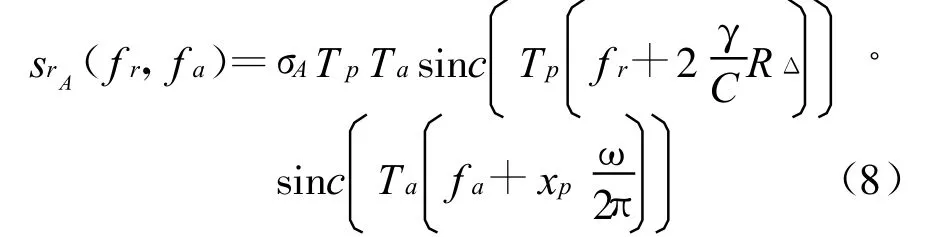
将式(8)代入式(11)得到
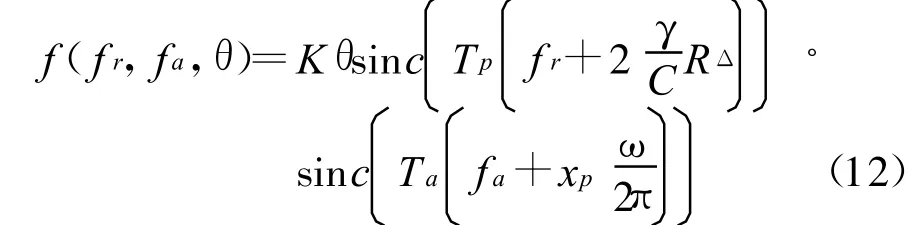
由式(12)可见通过ISAR像的比幅可以完成垂直于距离向的定标,将散射点多普勒转化为实际距离。
ISAR系统接收信号为解线频调非相参信号,既存在包络的移动,各次脉冲间也存在不同初始相位。包络对齐一般采用包络互相关方法[7],为了减小和差波束ISAR的差异,需要采用联合包络对齐,即两通道采用相同的包络作为对齐基准。相位校正时采用多特显点综合法[8],这里采用联合多特显点方法,同时采用Keystone变换[9]的校正ISAR的距离徙动。
利用比幅法测角时为图像像素点的幅度比值,ISAR像与SAR像不同,图像中仅有少数不连续的强散射点,且旁瓣和噪声较大,直接对方位FF T进行三维成像误差较大,采用CLEAN算法[10]或者APES算法[11]可以有效消除旁瓣的影响。由于CLEAN算法不具备相位保持特性,这里采用APES算法进行方位向的处理。
ISAR像素点测角过程中仍然存在角闪烁,需要进行消除,这里采用文献[12]所提出的剔除发生角闪烁散射点的方法。需要说明的是实测数据处理中二维成像后的角闪烁现象依然存在,只是较一维距离像角闪烁影响减小,如何完全消除角闪烁仍然是一个值得研究的问题。
根据坐标转换将距离多普勒图像转换为距离角度图像,通过比例因子K即可得到目标二维距离水平像。这里仅讨论水平的两个天线,同理得到俯仰向两天线的二维距离俯仰像,通过图像融合得到目标三维像。
综合上述处理步骤,得到ISAR三维成像流程图如图2所示。
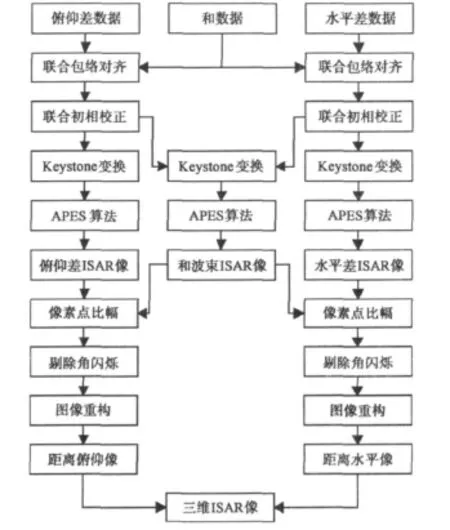
图2 实测三维ISAR成像流程图
2.实测数据处理及结果分析
为了验证本文算法的可行性,下面分别对实测散射点目标及飞机目标进行三维ISAR成像。
2.1 双散射点目标
雷达跟踪对象为四个静止的球状目标,可近似为散射点,雷达机械扫描转动搜索,发射信号带宽为800 MHz,数据处理结果如图3所示。
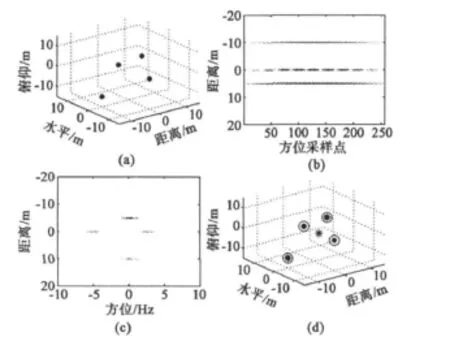
图3 散射点目标三维ISAR结果对比
图3中(a)为散射点模型,(b)为距离脉压结果,(c)为和信号的成像结果,(d)为三维ISAR成像结果,“.”表示理想散射点模型,“*”表示传统一维距离像三维成像结果,由于多散射点叠加的影响,散射点位置和个数出现偏差,“o”表示本文成像结果,由重构结果可知四个散射点可以完全分离。
实测点目标数据处理结果可知,通过ISAR像的比幅法测角在实际应用中是完全可行的,其三维形状与实际散射点位置一致,验证了本文算法的有效性。
3.2 实测飞机目标
为了进一步验证三维ISAR成像实际应用的可行性,该雷达对远距离民航客机进行跟踪并三维成像,处理结果如图4所示。
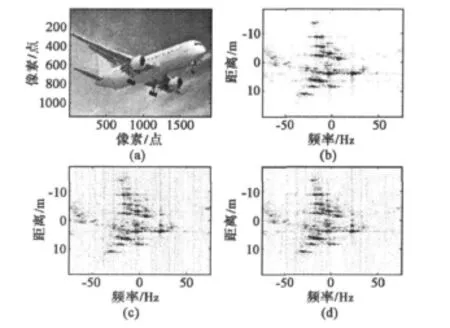
图4 和差波束ISAR成像
图4中(a)为民航飞机光学图像,(b)为和信号的ISAR结果,(c)与(d)分别为水平差、俯仰差信号的ISAR成像结果。采用RD0.成像之前需要经过运动补偿及距离徙动校正。和信号ISAR分别与水平差ISAR像及俯仰差ISAR像进行像素点干涉和比幅,得到如图5所示结果。
图5(a)、(b)分别为水平俯仰通道的干涉相位图,(c)、(d)为两个通道的比幅结果图,可以看出相位及幅度比均呈现一定的趋势性,为后续的处理提供了可能性。
为了对比本文方法结果与传统一维距离像的比幅法成像结果,这里画出了传统处理方法的三维成像结果,如图6所示。
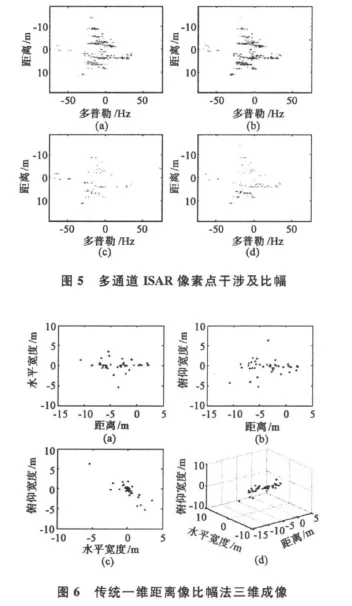
图6直接采用一维距离像比幅法测角进行三维成像,图(a)、(b)、(c)分别为三维成像在距离水平平面、距离俯仰平面、水平俯仰平面的投影,(d)为一维距离向的三维成像。可以看出采用一维距离像的比幅法测角对高分辨目标成像效果较差,同一距离单元内多个散射点的叠加使得测角误差较大,最终导致目标轮廓变形。
下面采用本文提出的利用ISAR图像像素点的幅度比进行图像重构,得到如图7所示结果。
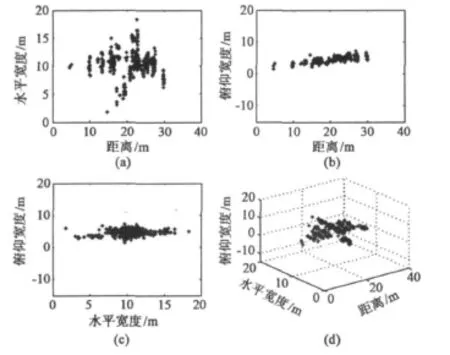
图7 三维ISAR成像及二维投影
图7为三维ISAR成像及其在二维平面的投影,(a)为三维ISAR在距离水平平面的投影,(b)、(c)分别为三维ISAR在距离俯仰平面及水平俯仰平面的投影,(d)为合成后的三维ISAR图像。图(a)中可以清楚的看出目标飞机的轮廓,并且可以得到飞机的实际尺寸,实现目标的定标。比较图6与图7结果可知,本文提出的方法对实测数据效果更具有直观性。该方法既可以显示目标的轮廓,也可以准确定标,较传统一维距离向测角三维成像具有更大的优势。
4.结 论
在大带宽、高分辨情况下传统的一维距离像比幅法测角,由于多个散射点的复数叠加难以对目标轮廓进行准确定位。本文采用了基于ISAR图像的像素点比幅法测角,利用同一距离单元内散射点多普勒的不同分离重叠的散射点,最后利用散射点的幅度比重构三维ISAR图像。实测数据结果显示该方法较传统方法成像质量有较大改善。对远距离目标跟踪、定标、识别提供了前提,为实际工程运用提供了另一种可行的方法。目前对三维ISAR研究刚刚起步,国内首批数据中仍存在较多问题,三维ISAR成像算法及补偿算法是今后研究的重点和方向。
[1]CHEN C,ANDREWS H C.Targets motion induced radar imaging[J].IEEE Trans.On AES,1982,16(1):2-14.
[2]BAO Z,SUN C Y,XING M D.Time-frequency approaches to ISAR imaging of maneuvering targets and their limitations[J].IEEE Trans.On Aerospace and Electronic Systems,2001,37(3):1091-1099.
[3]CHEN V C,QIAN S.Joint time-frequency transform for radar range-doppler imaging[J].IEEE Trans.On Aerospace and Electronic Systems,1998,34(2):486-499.
[4]张明友,汪学刚.雷达系统[M].北京:电子工业出版社,2006:45-49.
[5]WANG Genyuan,XIA Xianggen,and CHEN V C.Three-dimensional ISAR imaging of maneuvering targets using three receivers[J].IEEE Trans.Image Processing,2001,10(3):436-447.
[6]张 群,马长征,张 涛,等.干涉式逆合成孔径雷达三维成像技术研究[J].电子与信息学报,2001,23(9):890-898.ZHANG Qun,MA Changzheng,ZHANG Tao,et al.Research on 3-D imaging technique for interferometric inverse synthetic aperture radar[J].Journal of Electronics and Information Technology,2001,23(9):890-898.(in Chinese)
[7]邢孟道,保 铮,郑义民.用整体最优准则实现ISAR成像的包络对齐[J].电子学报,2001,29(12A):1807-1811.XING Mengdao,BAO Zheng,ZHENG Yimin.Range alignment using global optimization criterion in ISAR imaging[J].Acta Electronica Sinica,2001,29(12A):1807-1811.(in Chinese)
[8]YE W,YEO T S,BAO Z.Weighted least-squares estimation of phase errors for SAR/ISAR autofocus[J].IEEE Trans.On Geoscience and Remote Sensing,1999,37(5):2487-2494.
[9]PERRY R P,DIPIETRO R C,L FANT E R.SAR imaging of moving targets[J].IEEE Trans.AES,1999,35(1):188-199.
[10]TSAO J and STEINBERG B D.Reduction of sidelobe and speckle artifacts in microwave imaging:the CLEAN technique[J].IEEE T rans.on AP.1988,36(4):543-556.
[11]LI Jian,Stoica P.An Adaptive Filtering Approach to Spectral Estimation and SAR Imaging[J].IEEE T rans.Signal Processing,1996,44(6):1496-1484.
[12]HUANG P K,YIN H C.Angular glint of extended targets[J].Journal of Systems Engineering and Electronics,1990,12(12):l-17.
