ROV在深水海底电缆铺设中的应用研究
2010-07-10李军安
刘 阳,李军安
(天津港湾水运工程有限公司,天津 401331)
1 引言
近年来,随着海洋石油开发不断向深水区域发展,在潜水员不能达到的深度和不安全的作业环境中,ROV(Remotely Operated Vehicle)是最主要的作业工具之一,其深水作业能力强的特点使其能够完成高强度、大负荷的工作。
2 ROV及其作业系统介绍
ROV(Remotely Operated Vehicle),远程操纵运载器,国内通常称为水下机器人。自1953年第一台ROV下水,ROV从诞生走向产业化只用了半个世纪的时间。在海上石油开发、海洋科学研究、海底矿藏勘探、海底打捞救生以及军事应用等方面正发挥着越来越重要的作用。ROV发展到今天,数量和品种已经非常多。近几年来,已经多达275种,工作水深从几十米到上万米,重量由几十千克到几十吨,而且出现了许多专用型ROV。
ROV的设计是一项综合性的复杂工程,技术密度高,其研制水平体现了一个国家的综合技术力量。作为一种由水面控制的高技术水下作业系统,ROV能在水下三维空间自由航行,通过外挂摄像头、避障声纳或管线跟踪器观察,再结合多功能机械手或其它水下工具,完成大量的水下作业任务。
按控制方式ROV可分为两种:系缆型和无缆型。系缆型通过脐带电缆获得动力、传送操作指令和遥测数据;无缆型由动力定位船通过声纳发信器发出遥控指令,对潜器的工作实现遥控。
在海洋石油开发领域,ROV主要应用在海洋设施安装水下支持、海洋设施水下检测、海管海缆铺设现状调查、海管海缆铺设支持等。
2.1 ROV系统组成
系缆型ROV的技术最成熟、成品多、门类齐全,应用广泛。PantherPlus909 ROV就是此类ROV中的一个比较典型的代表。就整体系统而言包括潜水器、主控集装箱(Control Room)、维修和工具集装箱(Workshop)、脐带和回收钢缆绞盘系统(Winch)以及ROV释放与回收系统(A-Frame或Crane)、液压动力站(HPU)以及用于绞盘系统和释放回收系统操控台(Control Panel)。
2.2 水下作业系统
ROV本身作为一种运载工具,在进行水下作业时必须携带水下作业工具。可以说,水下作业系统是ROV工作系统的核心,没有它,水下机器人充其量只是个观察台架而已。
水下作业系统包括多功能机械手和各种水下作业工具包。主要有以下一些功能:海下救助和打捞,海底打捞物提升缆的系结,海中闸门的关闭,海中螺栓的拆装,海中各种柔性缆、钢缆的切割,水下构件或船体表面的清洗,水下钻孔,管线检测等。
2.3 吊放回收系统
ROV通常由支持母船运载到作业地点,然后从母船上将其吊放至水中,而当其完成水下作业(或发生意外情况),又将其回收到母船上进行维护和保养。然而,在海面与大气交界处进行吊放回收作业时是十分危险的。海况是一个主要不利因素,风浪、海流的作用以及母船的横摇、纵摇、升降运动都会使ROV产生难以预料的运动,极易发生碰撞的危险。
3 ROV深海水下作业实例
本文以深海电缆铺设项目为例,介绍ROV在深海作业水下作业过程,仪器参数如下:
ROV型号:ROVTECH公司:PantherPlus909型ROV
海缆铺设支持船舶:海洋石油299
海底电缆的型号和规格:6130M×Φ87mm复合电缆,空气中重量17.5kg/m,水中重11.8kg/m。
3.1 预先调查
海缆由东方CEP中心控制平台到WHPA平台,全程一共5.6 km(如图1所示)。在电缆铺设前首先需要ROV对海床面和导管架水下情况做好预调查。
调查的范围主要包括:①检查两侧的平台电缆护管钢丝不被导管架阳极等结构物缠绕。②检查护管喇叭口方向是否正确以及是否有盲板封堵、平台附近电缆抽拉路径是否有障碍物、电缆铺设路径上有无影响作业的渔船等。
3.2 发现问题和解决办法
预调查时发现在20水深处电缆护管钢丝被导管架上的阳极块缠绕,ROV使用液压手臂将缠绕住的钢丝绳从阳极块上绕出。并对平台附近电缆抽拉路径上的障碍物进行清理。检查喇叭口方向正确,没有盲板封堵。
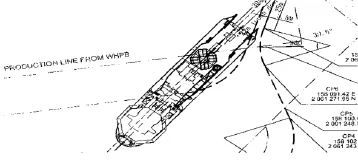
图1 作业平台示意图
3.3 ROV的水下作业支持
ROV完成预调查后,海洋石油299就位于CEP中心控制平台,距平台约30 m,如图2所示。将牵引钢丝绳由撇缆绳送到海洋石油299甲板。牵引钢丝与电缆头网套用5吨碟型卡环连接固定。启动绞车牵引电缆上平台。ROV在水下喇叭口通过广角微光摄像头监视电缆的松紧程度,根据ROV水下的观察情况来决定电缆收放速度的快慢。
海缆由J型护管拉上CEP控制平台后测试海缆的通讯线路是否完好,测试完成后开始走船放缆,起始铺设方式采用的是步长方式,即电缆释放长度等于走船距离,ROV在水下观察海缆着地点和海缆的受力情况,手动操作张紧器,过弯段100 m后张紧器转为恒张力铺设。设计水深70 m,电缆着地点与船舶距离为77 m,电缆拉力1400 kg与船尾夹角为25°ROV在水下观察电缆着地点的变化,通过DP定位系统和ROV潜器的信标来确定海缆着地点与铺缆船的距离。在海底电缆铺设过程中,DP定位人员与张紧器造作员进行距离长度对比,每100校对一次,走船速度根据现场海况情况而定,海底电缆铺放速度暂定为15~20 m/min。
当船舶到达末端WHPA平台拐点时进入结束端电缆铺设,暂停走船,张紧器改为手动操作,释放电缆使着床距离为10~15m (既海缆在海床的着地点与船舶的距离为10~15m),张紧器记数器设置为零,铺设方式为步长式(这时所剩电缆长度应当大于350m)。

图2 作业支持示意图
当计数器现实电缆剩余量30~35m时,暂停走船,切掉甲板上的多余电缆,开始制作电缆头。制作完成后继续走船,待电缆头下塔架后,停船到电缆护管喇叭口的轴线上,WHPA平台将牵引钢丝由渔船送到海洋石油299甲板上,如图3所示。与电缆连接后将牵引钢丝绕过导向柱送入水中,平台使用气动绞车慢慢收紧牵引钢丝,张紧器计数器设置为零开始收缆、海缆由平台绞车拉上平台 (299甲板上张紧器的操作员要与平台上气动绞车控制人员保持密切联系以保证张紧器与绞车的同步)。
ROV潜至平台喇叭口附近监视电缆的松紧程度,将画面传送给299船驾驶台,通过观察画面来调整张紧器和绞车的收缆速度。
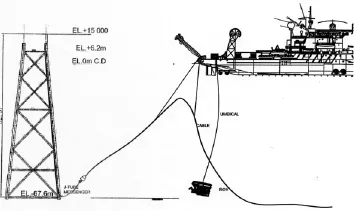
图3 电缆伸缩示意图
当张紧器计数器显示收回电缆到130m时,工作暂停,在299后甲板左右电缆上各安装一个电缆拖拉网与299甲板上的两个气动绞车相连,两个气动绞车带力收紧钢丝绳,张紧器稍微从水中收回电缆,左侧绞车跟随收紧,使海缆在甲板上的弯段放松不受力时,打开张紧器履带轮,将海缆抬出甲板导向柱,两个绞车慢慢释放电缆。恢复平台电缆牵引工作,当电缆弯段到达船尾时,甲板上两个气动绞车继续放下电缆,平台牵引速度保持与甲板两个气动绞车释放速度同步。ROV下水监测下放电缆过程。防止张紧器侧的海缆在下放过程中在海床上堆积成堆 (如果发现海底电缆有堆积出现,299将移船调整)。
当海缆拉上平台的长度满足平台要求长度时,将电缆放到海床,甲板切断固定端的钢丝绳,气动绞车回收钢丝绳。海底电缆经测试完成后正式投入使用。海缆铺设项目结束。
4 ROV应用前景展望
(1)计算机技术在ROV中的应用促进ROV控制技术发生巨大变化,新一代采用更新型技术的ROV已经开始呈现在我们的面前。多媒体技术、临场感技术及虚拟现实技术将产生新一代全新概念的ROV。
(2)近年来,人类的活动领域不断扩大。国际公海组织规定,对有能力进行深海勘探的国家将有优先开采权。因此开发深水海洋石油将是我国面临的一个非常迫切而富有挑战性的工作。然而海洋石油开发的主要特点是工作环境的非结构化和不确定性,因此对机器人的要求更高。而目前的ROV脐带电缆约束了ROV水下载体的活动范围,增加了成本,在复杂环境中危害着ROV水下载体的安全。因此,AUV(Autonomous Underwater Vehicle)技术将成为ROV技术的延伸和发展。
[1]单宇翥,陈洋.水下机器人在三峡水利枢纽导流底孔封堵检修门水下清理工程中的应用[J].大坝与安全,2005,(3).
[2]郭威,崔胜国,赵洋,等.一种遥控水下机器人通信系统[J].电气自动化,2008,(5).
[3]周银,张建文,黄晓欧.水下机器人(ROV)在消防部队抢险救援中的应用前景探讨[J].消防技术与产品信息,2007,(9).
[4]孙虎元,孙立娟,侯保荣.用于近海海洋环境检测的轻型机器人[J].海洋技术,2005,(1).
[5]晏勇,马培荪,王道炎.深海 ROV及其作业系统综述[J].机器人,2005,(1).