车体姿态扰动与射击诸元误差相关性分析
2010-06-27崔星毅王蕊照解伊娜
崔星毅,魏 玮,王蕊照,解伊娜
(西北机电工程研究所,陕西咸阳 712099)
射击精度是自行高炮最重要的性能指标,直接影响着对空目标的射击效率。射击精度的误差源有很多,如搜索误差、跟踪误差、数学模型误差等。而车体扰动误差是行进间射击区别于停止间射击的特征误差:随着车体的行进和振动,车体在三维空间上产生六自由度的无规律平移与转动。为了保证射击精度,一方面要求测量装置能够实时、精确地测出车体的位移与姿态,同时还要求根据位移、姿态的动态信息对跟踪和相遇问题的解算进行相应的修正计算[1-3]。显然,这种由于行进所造成的车体扰动误差给自行高炮的射击精度分析带来了更大的难度。本文旨在通过对某自行高炮的动飞试验数据进行计算、分析,寻求车体姿态扰动与射击诸元误差的相关性规律。
在同一时间坐标下,以经纬仪对靶机的实时测量、处理数据为标准值,以从自行高炮数据传输总线上录取的火控射击诸元实时输出数据为被测值,取差计算火控输出射击诸元误差。同时,实时采集行进中的车体姿态角,对车体姿态角(及其变化率)与火控射击诸元误差做相关性分析,寻求后者相对于前者的变化规律。
1 行进间数据获取方法
取同一初始时刻t0,周期20m s,统一编号采集如下数据:
1)车体姿态
即车体坐标系相对地理坐标系的姿态,其中αJ为纵摇角(俯仰角),γJ为横滚角。数据从动飞试验时自行高炮的CAN总线上录取(姿态测量装置已将姿态信息实时上传CAN总线),所得数据为两个数列组,表示为:

式中:ti=20i,i=0,1,2,…,n。
2)火控输出射击诸元
火控输出射击诸元即火控输出给随动系统的射击诸元,βJg为方位角,φJg为射角。数据从动飞试验时自行高炮的CAN总线上录取,所得数据为两个数列组,表示为:

3)目标坐标矢量
即目标靶机在飞行过程中,由经纬仪等高精度测量装置所测得的飞机实时坐标矢量,其中lm为目标斜距离,βm为方位角,φm为高低角。所得3个数据为3个数列组,亦即:
2 行进间数据处理方法
2.1 射击诸元标准值
炮在地面行进状态下跟踪飞机,同时高精度光电经纬仪也在实时测量跟踪。由于经纬仪精度极高,故可将其测量数据作为目标航迹的标准值。试验结束后,将经纬仪的测量数据按照一定的模型假设拟合,拟合出的图形即是目标靶机的真实运动轨迹[4-6]。本文在数据处理过程中所选用的靶机运动模型为匀速直线运动。
在自行高炮有效射程内的航迹上任意指定一点D(ti)=D(t+tfi),查射表可知tfi,如果将D(ti)作为未来点,以该未来点为起点,逆航路上行t f i时间就可找到射击瞬时(t时刻)目标在航路上的位置,即找到了对应未来点D(ti)的现在点D(t),对数组{D(ti)}进行插值运算,就可以得到航路上任一现在点D(t)所对应的未来点D(ti)。由于射击瞬时自行高炮与目标靶机的现在点、未来点均为已知,故可得到火控在 t时刻的射击诸元输出标准值[7-8],记其为 Mbi。
由于本文只对射击诸元[β,φ]T进行计算分析,故标准值矢量M b i取为:

2.2 火控输出射击诸元误差
火控输出射击诸元误差即火控输出射击诸元与射击诸元标准值之差。该差值为两个数列组,表示为:
2.3 姿态角的参照基准选取及初始化处理
在对误差进行计算时,受关注的是从时刻t0到ti(i=0,1,2,…,n)的时间区间内,车体姿态角的变化值(即增量),而不仅仅是其在 ti时刻的瞬时值。因此,需要确定车体姿态角的参照基准。取车体姿态角在t0时刻的瞬时值为参照基准,对时间区间[t0,ti]的原始数据处理如下:
动飞试验时,在目标靶机飞行过程中,自行高
3 车体姿态角与火控输出的射击诸元误差相关性计算分析
行进间射击时,火控输出的射击诸元误差是车体姿态角的函数,即:

但它们又同时是时间t的函数:
显然,上两式都是以 t为参变量的 Δβ、Δφ关于Δα、Δγ的二元函数,在 O-ΔαΔγΔβ或O-ΔαΔγΔφ三维坐标系中,它们分别是一条空间曲线。选取时间区间t∈[t0,tn],用MATLAB数学工具软件绘制其曲线如图1和图2所示。
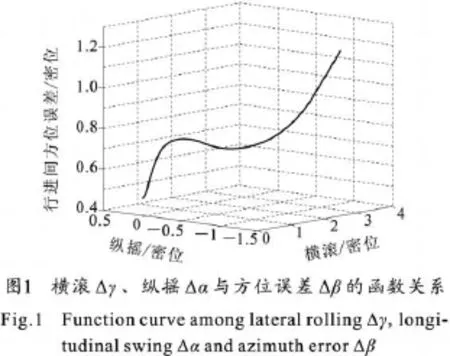
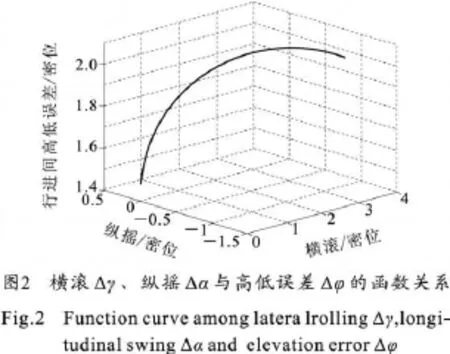
结果分析:
由以上曲线可知,误差随车体姿态角变化量的绝对值的增大(减小)而增大(减小),呈正相关关系。说明车体姿态角(俯仰角α、横滚角γ)是射击线姿态角(方位角 β、高低角 φ)的误差源,且 α、γ无论向哪个方向倾斜(或俯、或仰、或左倾、或右倾),倾斜的幅度都将与误差呈正相关关系,造成误差变化。
4 车体姿态角变化率与火控输出诸元误差相关性计算分析
Δα、Δγ相对于时间的变化率˙α、˙γ在数学上分别代表纵摇和横滚的角速度,在物理上则反映了路面的颠簸程度和行驶的快慢程度。
用MATLAB对其拟合并求一阶导数得:

由于它们同时是时间t的函数,所以
绘出上两式的三维空间曲线如图3和图4所示。
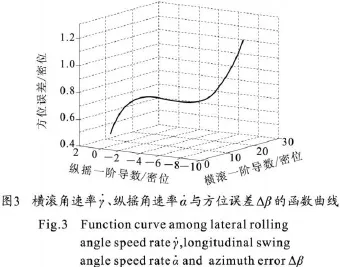
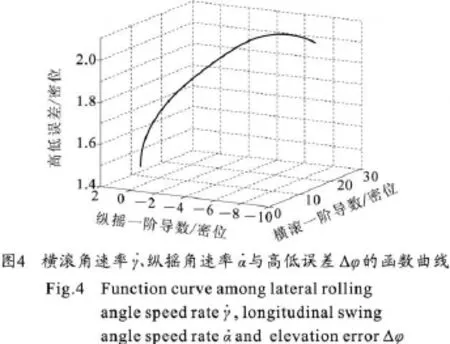
5 结果分析
由上述曲线可看出射击诸元误差Δβ、Δφ不仅与车体姿态角的变化量Δα、Δγ呈正相关关系,而且与˙α、˙γ也呈正相关关系,或者说与俯仰角速度、横滚角速度呈正相关关系。这就证明了行进间射击时,路面的颠簸程度、行进的速度快慢也将造成射击误差,影响射击精度。显然,行进间射击过程中,在条件允许的情况下,选择相对平坦的路面,选择相对较低的行进速度,对减小射击误差是有益的。
需要指出的是,误差Δβ、Δφ是火控综合误差,而不仅仅是由于姿态角α、γ及其角速率˙α、˙γ所引起的。但由于行进间射击时车体扰动误差在火控综合误差中所占的权重很大,故作出上述三维空间曲线来观察分析 Δβ、Δφ相对于α、γ及˙α、˙γ的变化趋势,虽不十分严谨,却有助于说明问题,具有工程应用价值。
6 结束语
本文根据某自行高炮大量动飞试验数据,对行进间射击火控精度与车体姿态扰动的相关性进行分析研究,得到了上述结果和结论。这些结果和结论具有工程应用价值和理论参考价值,对自行高炮的战场使用也具有一定的应用价值。另外,本文虽是对自行高炮的行进间射击进行的精度分析,但分析的思路、过程、结果和结论同样适用于舰船、飞机和坦克等武器,具有一定的普遍性。
[1] 郭治.现代火控理论[M].北京:国防工业出版社,1996.GUO Zhi.Modern fire control theory[M].Beijing:National Deference Industry Press,1996.(in Chinese)
[2] 王东军,王建飞,康哲.某型坦克简易火控系统射击方法精度分析与选择[J].火炮发射与控制学报,2006(增刊):18-20.W ANG Dong-jun,WANG Jian-fei,KANG Zhe.Accuracy analysis and selec tion of facility fire control system for a tank[J].Journalof Gun Launch&Control,2006(SI);18-20.(in Chinese)
[3] 唐学梅,易群智.现代自行加榴炮系统精度评定方法研究[J].火炮发射与控制学报,2001(1):28-33.TANG Xue-mei,YIQun-zhi.Analysis for modern selfpropelled how itzer system accuracy estimate method[J].Journal of Gun Launch&Contro l,2001(1);28-33.(in Chinese)
[4] 雷洪.粗差判别方法的比较与讨论[J].石油仪器,1997,11(1):53-56.LEIH ong.Comparing and discussing with rough error estimate method[J].Petroleum Instruments,1997,11(1):53-56.(in Chinese)
[5] 吴云龙,张飞猛.自行高炮武器系统精度参数理论[M].北京:国防工业出版社,1999.WU Yun-long,ZHANG Fei-M eng.A ccuracy data theory for self-p ropelled antiairc raft gun system[M].Beijing:National Deference Industry Press,1999.(in Chinese)
[6] 康新中,马春茂.火炮系统建模理论[M].北京:国防工业出版社,2003.KANG X in-zhong,M A Chun-mao.Modeling theory for gun system[M].Beijing:National Deference Industry Press,2003.(in Chinese)
[7] 肖元星.计算着发射击高射武器系统毁伤概率的通用程序[J].火力与指挥控制,1989(4):65-69.X IAO Yuan-xing.Current programs for calculating damage rate of impact fire antiaircraft w eapon system[J].Fire Control&Command Contro l,1989(4):65-69.(in Chinese)
[8] 周启煌.卡尔曼滤波在坦克目标状态估计中的应用[J].装甲兵工程学院学报,1998,12(2):40-44.ZHOU Qi-huang.Tank target estimate using Kalman filtering[J].Journal o f A rmored Force Engineering Institute,1998,12(2):40-44.(in Chinese)
