直接型自适应模糊控制器的设计及其在汽温控制中的应用
2010-06-23牛培峰孟凡东陈贵林马巨海王怀宝窦春霞
牛培峰, 孟凡东, 陈贵林, 马巨海,王怀宝, 张 君, 窦春霞
(1.燕山大学电气工程学院,秦皇岛066004;2.燕山大学工业计算机控制工程河北省重点实验室,秦皇岛066004)
在当今的控制领域中,由于存在很多具有强干扰、非线性、时变、强耦合等特点的系统,采用传统PID控制的控制质量已不尽如人意.而模糊控制是一种基于模糊集合理论和模糊推理的智能控制方法,它不依赖被控对象精确的数学模型,有一定的适应能力和较强的鲁棒性,因此近年来引起了控制界的广泛关注.在很多非线性动态系统控制问题的设计中,人们利用模糊逻辑系统的通用逼近能力,在存在建模误差的基础上对相关参数进行自适应调节,最终确定出非线性系统的自适应模糊控制方案,实践证明这是一种行之有效的设计方法,该方案已成为非线性自适应理论的一个研究热点.文献[1]~文献[3]基于监督控制方法,提出保证闭环稳定性的自适应模糊控制方案,但其跟踪误差的收敛依赖于逼近误差平方可积的假设.
针对一类具有未知函数增益的不确定非线性系统,基于监督控制方法并利用第二类模糊系统的逼近能力,笔者提出了一种带有补偿器的直接自适应模糊控制设计方案.通过引入最优逼近误差的自适应补偿项来消除建模误差的影响,从而在稳定性分析中取消了要求逼近误差平方可积或逼近误差的上界已知的条件,保证了闭环系统的稳定性和状态有界,且跟踪误差收敛到零.
1 问题描述
考虑如下形式的非线性系统

式中:f为未知的连续函数;b为未知的正常数;u⊆R与 y⊆R分别为系统的输入与输出;令X=(x,˙x,…,x(n-1)),X⊆Rn,X为系统的状态向量,并假设其可测或可计算.
直接自适应模糊控制采用下面If-then模糊规则来描述控制知识,即:

将式(2)代入式(1)得:

由K的选取可得t→∞时,e(t)→0.
直接自适应模糊控制是基于模糊系统设计一个反馈控制器u=u(x|θ)和一个调整参数向量θ的自适应律,使系统的输出y尽可能跟踪理想输出ym.
2 直接型自适应模糊控制器的设计
2.1 模糊系统
考虑定义于紧集U⊆Rn上的,带单值模糊器、乘机推理机、高斯隶属函数和中心平均解模糊器结构的模糊系统:

定义模糊基函数 ξ(x)=[ξ1(x),…,ξN(x)]T,其中:

θ=[θ1,θ2,…,θn]T.则式(4)可以写成 F(x)=ξ(x)TY.
对任意定义于紧集U⊂Rn上的实连续函数f(x)及任意ε>0,都存在式(4)的模糊系统F(x),使详细证明见文献[4].
2.2 控制器的设计
现构造控制律为:

式中:ud为直接自适应模糊控制器;us为监督控制器;uco为补偿器.
(1)监督控制器设计
现推导系统的误差方程可得:

式中:∧c为一稳定矩阵,因此存在唯一的n×n阶正定对称矩阵P,满足李亚普诺夫方程 ΛTcP+PTΛc=-Q;Q为任意n×n阶正定矩阵;bTc=[0,…,0,b].
设李亚普诺夫函数为:

假设存在函数 fU(x)和常数bL,使得|f(x)|≤fU(x)且0<bL≤b,则构造连续监督控制us为:

式中 :当 Ve>¯V 时 ,I*=1;当 Ve<¯V 时,I*=0;sgn为符号函数.
(2)补偿器的设计
令|ω|≤ω*,对所有 X ∈Sx⊆Rn,ω*为未知正常数.选择补偿控制器为:

2.3 自适应律的设计
定义最优参数向量:

选择李亚普诺夫函数为:

式中:r1,r2为正常数.
对V求一阶导数得:

选择自适应律为:

为了保证参数有界,用投影法修正如下:
定义投影算子P{*}:

以上参数自适应律能保证θ⊆Ω,|ω|≤ω*.θ的有界性证明可参考文献[4],下面证明ω的有界性.
由以上自适应律可知,当|ω|≤ω*时,大于零 ,即此时其值在增加;但|ω|>ω*时为零 ,所以其值一定有界.
3 稳定性分析
对于系统整体控制取u=ud+us+uco,其中ud、us、uco分别按式(7)、式(12)、式(13)定义 ,自适应律取式(17)和式(18),则闭环系统所有信号有界且跟踪误差收敛到零.
证明:由于参数有界,因而状态的有界性可由监督控制保证.下面证明误差收敛到零,考虑设计自适应律时用的Lyapunov函数并求导得:

4 仿真研究
以锅炉主汽温[5]为被控对象,在保持串级控制系统基本结构的前提下,设计图1所示的自适应模糊汽温控制系统.

图1 主汽温自适应模糊控制系统结构图Fig.1 Adaptive fuzzy control system structure of main steam temperature
在图1中,主调节器采用自适应模糊调节;Wa1(s)为副调节器;W01(s)和W02(s)分别为调节对象及其导前区的传递函数;WH1(s)和WH2(s)分别为导前汽温和主汽温的测量单元.除主调节器外,其他环节的传递函数通过现场辨识分别得到:


将副调节回路和主调对象进行结合,并化简得如下所示的传递函数:

将其转化为状态空间为:

定义6个隶属度函数,见图2.

图2 隶属度函数Fig.2 Membership functions
G(s)初始状态为[0,0,0,0,0];θ中各元素的初始值均取0,K=[1,1,2,3,10]T,自适应参数取r=50.当设定值信号作+1 mA的阶跃变化时,自适应模糊控制系统的响应曲线如图3所示.

图3 汽温输出响应曲线Fig.3 Output response curve of steam temperature
由于锅炉负荷在实际运行中是变化的,因此上述模型各参数也有一定的变化范围.在上述控制系统模型基础上,变换的静态增益k和时间常数τ.具体做法为:0 s开始,仿真时系统各模型参数为原参数;在1 s时,将W02(s)中的k从1.125变为0.86、τ=25不变;待系统稳定后,在500 s时 ,将 τ从25变为 17、k=0.86不变 ;当系统再次稳定后,在1 000 s时,将k从0.86变为 1.2、τ=17不变,系统仿真到1 500 s.自适应模糊控制系统的响应曲线示于图4.
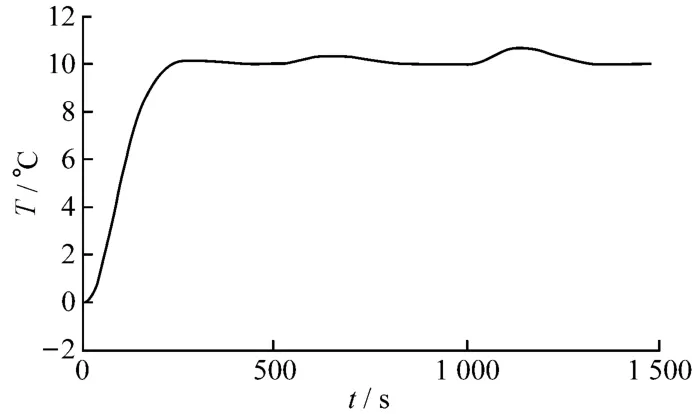
图4 参数变化时汽温输出响应曲线Fig.4 Output response curve of steam temperature with parameters changing
采用较复杂的三阶加纯滞后系统的主汽温数学模型[6]来检验直接自适应模糊控制器的控制效果.当负荷为37%时,由自适应模糊控制得到的仿真图示于图5.由图5可知,直接型自适应模糊控制器对于大惯性、大滞后系统仍具有很好的控制效果.

图5 三阶加纯滞后系统的汽温输出响应曲线Fig.5 Output response curve of steam temperature of three plus time delay sy stem
5 现场实际应用
5.1 分布式系统
汽温控制系统采用主/从分布式计算机系统,主机为研化工业控制机,采用IPC-610标准机箱,从机采用西门子S7-300 PLC.PLC采用模块化结构,具有扩展方便、可靠性高、维护性好等优点.
5.2 运行控制效果
应用图1所示的自适应模糊控制系统及上述主/从分布式计算机系统,构成自适应模糊汽温控制系统,用该系统来实现某热电厂200 MW汽包锅炉汽温系统的自动控制,选择采样周期为40 s.该自动控制系统在现场投运后,当锅炉负荷在50%~100%变化时,现场辨识得到模型各参数的变化范围为:k为1.32~0.96,τ为90~60 s.
200 MW汽包锅炉现场实际应用运行记录曲线见图6.由图6(a)可知,采用自适应模糊控制时的记录曲线,在变负荷时仍然具有良好的控制效果.由图6(b)可知,采用常规PID控制时的记录曲线,在变负荷时已经产生了振荡.
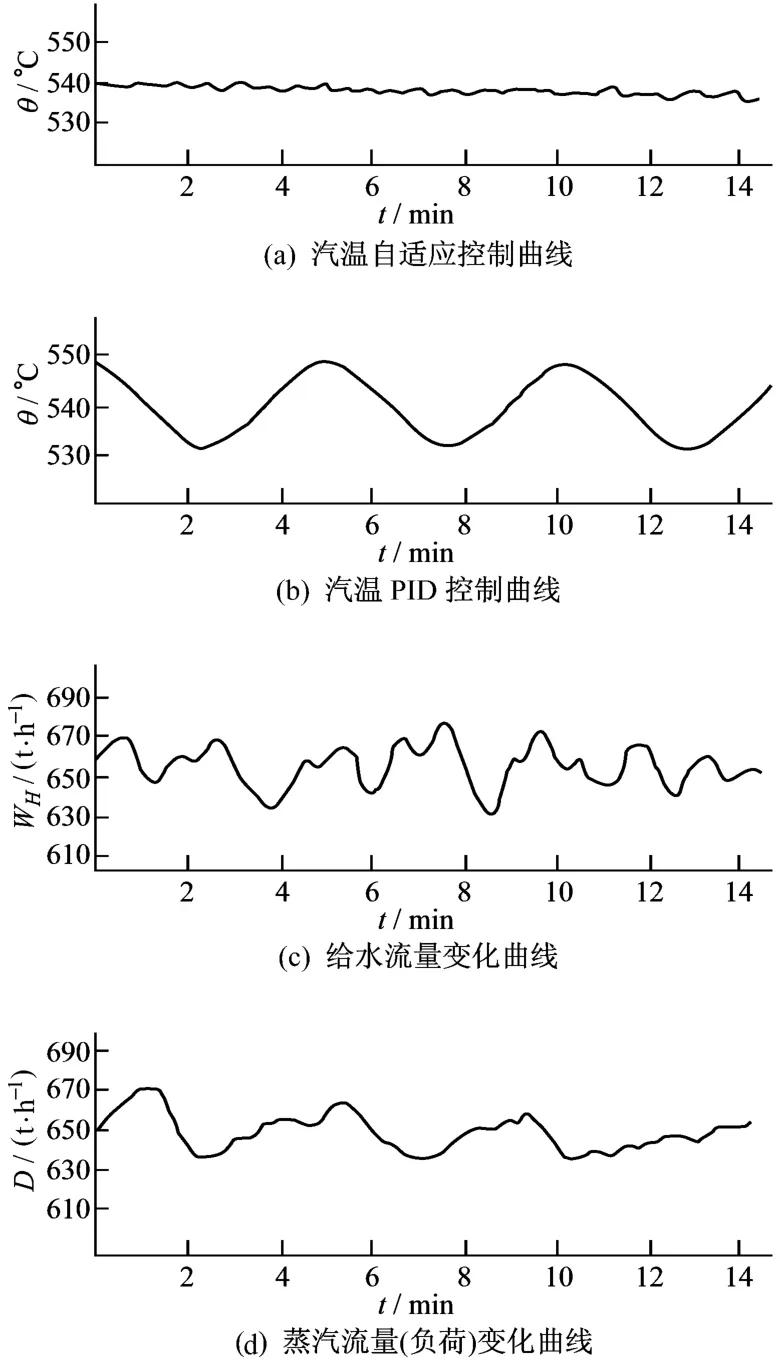
图6 现场运行记录曲线Fig.6 scenes movements record curve
6 结 论
针对一类非线性系统提出了一种稳定的直接型自适应模糊控制算法,该方法充分利用控制行为知识,引入了自适应补偿器来减小对跟踪误差的影响,在不要求最优逼近误差平方可积和上界已知的条件下证明了闭环系统的渐进稳定.通过仿真及现场实际应用,证明了该方法的有效性.
[1]WANG L X.Stable adaptive fuzzy control of nonlinear systems[J].IEEE Transactions on Fuzzy System,1993,1(2):146-155.
[2]WANG L X.Adaptive fuzzy systems and control-design and stability analysis[M].New Jersey:Prentice Hall,1994:200-350.
[3]张乃尧,金辉.对稳定的模糊自适应控制方案的研究与改进[J].自动化学报,1997,23(2):160-166.
[4]王立新.模糊系统与模糊控制教程[M].北京:清华大学出版社,2003.
[5]马永光,赵建军,张满良.主汽温系统的模糊PID控制及仿真[J].仪器仪表与分析检测,2006(1):1-4.
[6]杨锡运,徐大平,柳亦兵,等.过热汽温多模型预测函数控制策略的研究[J].动力工程,2005,25(4):537-540.
