提高天线丝杠传动速度的热应力分析
2010-06-13苏广平
苏广平
(河北远东通信系统工程有限公司,河北石家庄050020)
0 引言
丝杠传动是卫星通信天线末级传动的实现方式之一,具有减速比大、结构简单、成本低廉的优点,在天线结构中有广泛应用。伴随而来的问题是:丝杠与螺母之间的相对运动属于滑动摩擦,为了防范磨损导致的零件失效,设计中一般要对丝杠运动速度进行限制,也就相应限制了采用这种传动方式天线的转速提高。
在特殊卫星通信应用环境下,例如抗灾条件下的应急通信保障业务,用户对天线转星时间有特别要求,希望业务卫星切换时间尽可能短。这就要求天线转速尽可能高,以满足用户实时通信需要。虽然高转速不是采用丝杠传动方式天线的优势所在,但是该配置方式的低成本优势有利于卫星通信站点大面积布局,有利于应对自然灾害。例如中国移动集团公司的抗灾超级基站卫星通信系统工程中,远端站天线俯仰结构就选择使用丝杠传动方式。因此为了应对市场需求,通过技术细化,挖掘丝杠传动方式下天线转速潜力有实际需要。
1 问题分析
机械能-热能转化伴随滑动摩擦运动发生,热能使结构产生的热变形,受约束的变形产生压应力。
提升速度的需求最终归结为判断结构应力是否安全。问题的求解需要明确2个因素:①确定热能大小,判断热分析的可行性;②确定应力计算方式,解决量化问题。
1.1 热能分析
丝杠传动是滑动螺旋传动的俗称,是由丝杠和螺母组成螺旋运动副,将旋转运动转变为直线运动。在天线结构设计中,丝杠传动实现方式是由在固定位置内旋转的螺母推动丝杠直线移动。丝杠直线运动带动与丝杠连接的结构件围绕天线机械轴实现天线圆周转动。由于天线机械轴和电轴的一致性,圆周转动实现了天线电轴的转动,最终完成天线指向运动,即通常所说得寻星过程。
从机械原理的角度看,螺旋运动属于斜面滑动运动副,具有自锁功能的同时,传动效率低。传动效率计算式为:

式中,η为传动效率;λ为螺旋升角;φv为当量摩擦角。
螺旋运动副的螺母材料一般为青铜,丝杠材料为合金钢,二者摩擦系数取0.1[2]。天线所用传动丝杠的螺纹形式为梯形螺纹,当量摩擦角计算为5.91°。比较几种常用桁架天线的丝杠机械效率如表1所示。
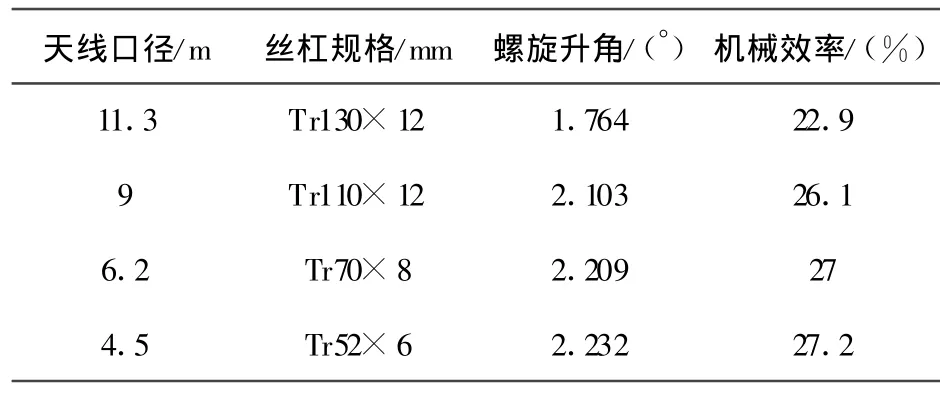
表1 天线丝杠机械效率表
从表1可以看出,丝杠传动会损耗大约70%的本传动级输入机械能。由于丝杠传动的上级机械传动方式一般为齿轮传动、蜗轮传动,综合效率通常大于50%。因此丝杠传动会损失1/3以上的总机械能,即使对于单轴驱动功率550 W的4.5 m天线来说,也意味着该级近200 W的功率损失。考虑到螺母的相对封闭性,转化积累的热能还是值得关注的。
1.2 应力计算方式及改进
由于摩擦生热和螺母环状结构的温度分布[3]都属于非线性计算,因此在传统滑动螺旋机械设计中,没有直接引入材料的热应力计算。变通方法是在静力条件下进行螺旋传动的耐磨性计算[1],依据丝杠-螺母间滑动速度与材料许用压强数值的对应关系,判定运动副是否安全。耐磨性计算许用压强表如表2所示。
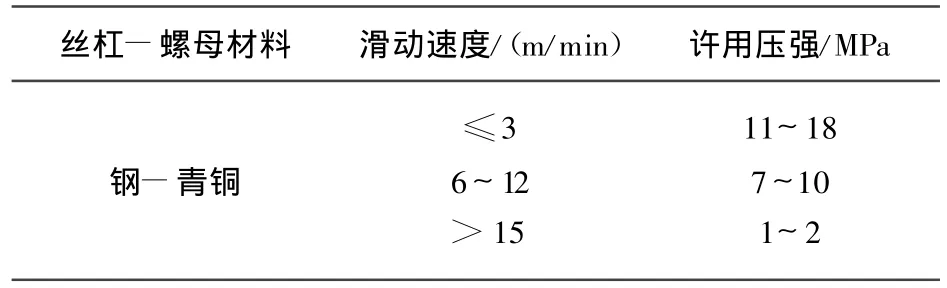
表2 滑动螺旋副材料耐磨性许用压强[2]
由表2可见,传统的耐磨性计算中数值条件不连续,约束了应用;另一方面,随着滑动速度增加,许用压强快速下降,在实际设计中会造成:为了适应降低了的许用压强,结构选型放大,在强度校核计算中材料冗余度过大。由于耐磨性计算和螺旋副的强度计算在传统计算中彼此相对独立,因此设计者在设计过程中难于充分利用材料设计能在较高转速运行的设备。
为了做到计算的一致性,有必要统一2个计算过程,求出结构在真实工作条件下的应力。因此,需要建立一种摩擦工况下的热应力计算方法。方法之一是使用有限元软件仿真工具。
2 仿真计算
问题的仿真计算分为2个主要步骤:①计算是丝杠-螺母运动副动力学仿真分析;②计算是热-结构耦合仿真分析,最终计算得到结构应力和变形,螺母上的最大应力是所关注的主要结果。其间,一些关键参数的设置关系到计算的进行。下面以ANSYS软件为示例进行具体说明。
2.1 计算流程
按照上述思路,求解步骤如下:
①计算天线的静载荷,包括天线自重载荷、风载荷;由于目前天线反射面加热除雪技术的普遍应用,不再加入冰雪载荷计算;
②根据静载荷计算作用在丝杠上的轴向力,计算丝杠中径截面轴向压强;
③建立丝杠—螺母摩擦仿真模型,通过有限元分析软件计算在给定滑动速度、压强下模型温度变化。按照传热学中导热定律,热流密度计算式如下:

式中,q为热流密度(W/m2);Q为热流量(W);s为热流通过的截面积(m2);λ为导热系数(W/(m◦k));dt为温度变化量;dx为热流传输方向长度变化量。
根据计算结果温度的变化梯度,通过式(2)计算通过单位面积产生的热流量,按照丝杠-螺母工作面积可以计算出摩擦生热的热流总值;
④建立丝杠-螺母仿真模型,先把上一步求解的热流值和模型对流系数作为热载荷进行仿真热分析,求解出模型温度分布。接下来的结构计算把轴向压力、温度分布作为载荷进行仿真分析。从结果文件中提取节点应力,按照第四强度理论计算屈服应力。本步骤中热流值加载方式较为关键,在下文详细说明。
重复步骤③,④,得到不同滑动速度下的屈服应力,直到计算结果逼近材料许用应力。
2.2 重要计算参数
为使有限元分析有的放矢,要计算天线转速和丝杠-螺母间滑动速度的对应关系;同时在有限元分析前处理过程中还要关注热载荷的加载方式和输入数据单位制的统一。
2.2.1 滑动速度与天线转速关系
根据机械原理中速度三角形,丝杠滑动速度与丝杠轴向轴向速度的比为丝杠升角的正割值。
定义滑动速度为Vs,丝杠轴向速度V1,丝杠升角为 λ,则

再根据天线结构推导天线转速和丝杠轴向速度的关系。假定当天线转动θ,丝杠移动L,丝杠轴向速度V1,则天线转速V2可表示为:

天线转动θ和丝杠移动L之间的关系可通过在CAD软件中作图实现。方法是在三维或二维模型中,测量在不同方位/俯仰角度下,按 θ进行天线体转动后丝杠长度的变化。表3是几种天线俯仰丝杠在40°~50°仰角下,0.1°/s转速对应丝杠滑动速度。
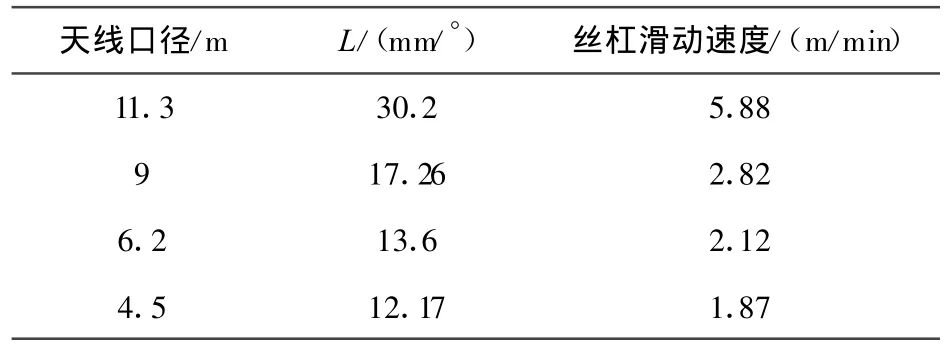
表3 天线俯仰转速与丝杠滑动速度对应表
2.2.2 热流值加载
天线寻星过程不是一个连续长时间工作过程,因此热分析模拟过程中,不能将热流作为一个恒定数值加载,进行稳态热分析;而需要按照实际运行时间进行加载,进行瞬态热分析。这需要使用载荷-时间表加载技术。以ANSYS软件为例进行说明,操作步骤如下:
①参数表数据结构:参数表的数据结构可以用计算机高级语言的数组结构来理解。时间点数目为数组的行数,各个时间点对应的热流数值组成一列;
②参数输入:参数输入可采取命令流方式,在程序菜单下,鼠标箭头显示“ANSYS Command Prompt”的命令输入区输入以下命令:
*DIM,Name,TABLE,4,1,1,TIME
Name(1,0,1)=time1
Name(1,1,1)=value1
Name(2,0,1)=time2
Name(2,1,1)=value2
Name(3,0,1)=time3
Name(3,1,1)=value3
Name(4,0,1)=time4
Name(4,1,1)=value4
Name表示表的名称,可用便于记忆的英文替代;4,1,1表示该表组成 4行 1列的 1维结构,time1~time4表示4个时间点,value1~value4表示对应点的热流值,在计算时用具体数值代替 time和value。time1、time2为天线寻星起止时间,即丝杠运转时间;time3为尽可能短的时间,以表示运转停止后热流下降到零过程;time4为热平衡时间,一般要大于热应力达到峰值的时间,可以根据软件计算结果进行调整,初值可以尝试设置。value1、value2取丝杠-螺母摩擦仿真的计算热流值,value3、value4可取零值。
2.2.3 计算单位制
有限元软件不对分析所用的各物理量单位进行转换,以保证量纲统一。当分析者使用国际单位制以外的自设定单位制时,需要事先换算单位,保证各物理量的量纲统一。如工程设计中长度单位毫米不是国际单位制中的基本单位,因此分析者事要把各物理量量纲式中的长度单位统一由米换算成毫米。以此类推。
国际单位制中,牛顿是导出单位,由于热分析中导热系数、比热容2个物理量的量纲式有瓦和焦耳此类导出单位。如果用质量单位书写导热系数、比热容的量纲式,显得冗长。因此,在涉及热分析时,可以把牛顿作为基本单位,把质量单位作为导出单位。
以毫米(mm)、牛顿(N)、秒(s)、开尔文(K)作为基本单位,换算出材料的弹性模量、密度、导热系数、比热容单位如表4所示。
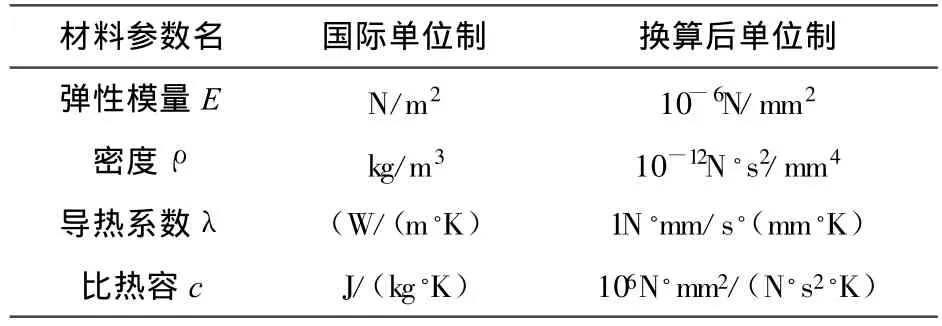
表4 单位制换算表
3 工程算例
从表3可以看出,随着天线口径增大,丝杠的滑动速度也相应增加。考虑到天线口径与波束宽度、跟踪速度的关系,大口径天线转速提高后,高低速度的比值过大,不利于整个伺服减速系统设计,因此中等口径以下天线转速提高的需求大于大口径天线。下面以6.2 m天线俯仰丝杠传动系统作为算例进行一定滑动速度下的热分析。
3.1 滑动摩擦过程计算
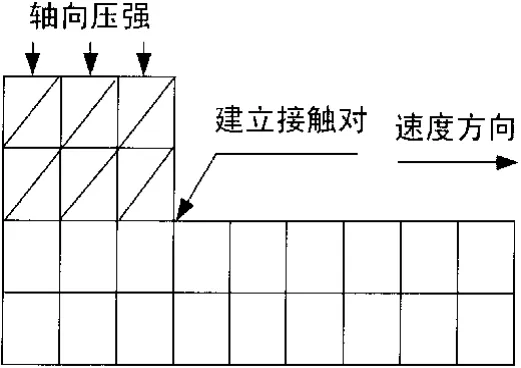
图1 滑动摩擦模型
6.2 m天线反射体和馈源系统自重约1 400 kg,设计工作风速28 m/s,根据天线结构,自重载荷+风载荷折算到丝杠轴向压力为25 962 N。丝杠规格Tr70×8 mm,使用 2个独立螺母进行预紧,每个螺母只在单侧和丝杠啮合,有效工作圈数 12圈。计算出作用在中径截面的压强为3.9 MPa。二维模型如图1所示。
斜线格代表螺母的中径截面,空白网格代表丝杠的中径截面,使用接触对运动模拟摩擦过程。注意以下几个步骤设置:
①接触对设置在ANSYS软件图形界面操作的路径(以下简称GUI)是:Main Menu→Preprocessor→Modeling→Create→Contact Pair,因为螺母使用处于不间断摩擦状态,因此把图中螺母和丝杠接合的下侧短边作为接触对中的Contact项,丝杠的上侧长边作为Target项;
②由于接触对分属2个不同的实体,因此在网格划分之后不要使用结构静力分析中常用的节点融合命令,即Merge Item命令;
③速度的加载方法是:按速度方向设置螺母截面位移,在求解控制对话框中设置时间,时间数值等于位移和速度的比值。求解控制对话框GUI路径是:Main Menu→Solution→Analysis Type→Sol'n Controls;
④分析类型为瞬态分析,GUI路径是:Main Menu→Solution→Analysis Type→New Analysis,选择Transient选项;
当天线俯仰转速为0.1°/s时,丝杠-螺母相对滑动速度为2.12 m/s,经对温度数据提取,螺母(青铜材质)上间距5 mm的表面温差为0.237℃,铜的导热系数为374W/(m◦k);按式(2),

可以用6.2 m天线的俯仰电机功率和俯仰减速系统理论效率来校核这个结果。俯仰电机功率为1.1 kW,减速系统组成为2级齿轮减速、蜗杆减速、丝杠减速,齿轮轴承效率为98%,蜗杆减速效率为53%,丝杠减速效率为27%,则摩擦生热的功率理论上不应大于:

有限元计算的热流密度乘以螺母有效圈数的面积,为摩擦过程传入螺母的热量,假设丝杠也接受了同等热量,则总热流量为:

3.2 热-结构耦合分析计算
建立螺母为主的仿真模型进行分析,基于以下考虑:
①查询手册[2]列出的材料应力,螺母材料许用应力低于丝杠材料;
②螺母各部分在运动中始终处于封闭摩擦状态;工作条件更恶劣。
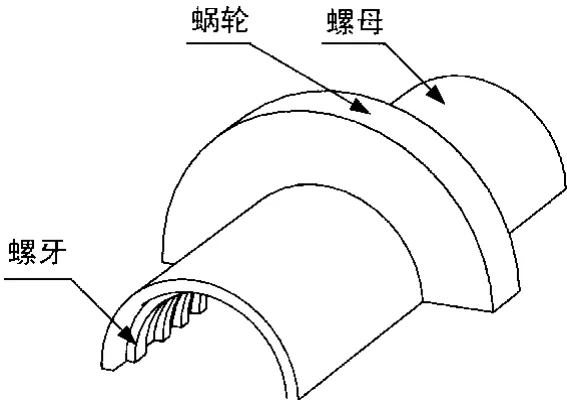
图2 热-结构分析实体模型
关于模型热载荷方面,因为与螺母连接的轴承内外圈之间为线接触,所以热分析中忽略热传导作用;以螺母和与其连接在一起的蜗轮为分析对象,考虑其表面自然对流散热作用;螺牙表面施加热流。螺旋回旋的螺牙部分简化成同心排列的圆环。三维模型如图2所示。
热分析的分析类型选择同滑动摩擦计算,注意Sol'n Controls对话框中时间和载荷-时间表中时间的一致性。
进行热分析计算,求解后得到温度计算结果文件。在ANSYS9.0下,该文件后缀名为rst,存放在ANSYS工作目录下。
然后进行结构分析。注意热分析和结构分析使用的单元类型不同,热分析使用SOLID70单元,结构分析使用SOLID45单元。单元转换操作是:Main Menu→Preprocessor→Modeling→Move/Modify→Elements→Modify Attrib,选择全部单元,输入SOLID45单元的属性号。分析类型选择稳态求解项:Steady—State。加载方式是:在螺母两侧施加起预紧作用的位移约束,在蜗轮上表面施加法向位移约束,对螺牙施加轴向压强,以热分析结果文件为温度约束,施加到整个模型。
经过计算,在天线转速 0.4°/s时,按照第四强度理论计算螺牙上节点应力,最大值为23 MPa。手册[2]建议动载条件下,螺母材料的屈服应力不大于40 MPa,设安全系数为1.5,则安全系数计算值满足要求。因此6.2 m天线在28 m风速下的俯仰最大转动速度建议不大于0.4°/s。
4 结束语
计算表明,在不改变材料前提下,天线转速仍有很大提升余地,从0.1°/s提升到0.4°/s,相当于转星时间压缩了75%。随着天线口径的减小,载荷按近似平方关系下降,速度提升的空间更大。这对于使用广泛的中小口径天线无疑是好事。目前得出的热应力结果还只是针对单一口径天线,不方便工程使用,下一步工作方向是绘制各口径天线的风速—天线转速对应关系曲线图,这样,理论计算可以更紧密为工程实践服务。
[1]濮良贵.机械设计[M].北京:高等教育出版社,1991.
[2]王少怀.机械设计师手册[M].北京:电子工业出版社,2006.
[3]杨世铭.传热学[M].北京:高等教育出版社,2004.