大口径超轻型反射镜定位和支撑方案研究
2010-06-11陈晓丽杨秉新
陈晓丽 王 彬 杨秉新
(北京空间机电研究所,北京100076)
1 引言
随着需求的提高和光学遥感器技术的发展,未来20年,我国将有多台空间光学遥感器的口径超过2m。对于空间光学系统来说,反射镜的价格与其直径的平方成正比,反射镜支撑结构和制造的价格与其直径的三次方成正比[1]。由此可见,大型光学反射镜在高分辨率空间光学遥感器中的地位十分重要,其面形精度直接决定了仪器的精度,其质量在一定程度上决定了整台仪器的质量和造价[2]。因此,可以说,直径2m的大口径反射镜已经成为影响遥感器性能、质量和研制成本的关键因素。如何降低反射镜的质量,保证其在轨的面形精度已经成为遥感器设计者关注的焦点。
当反射镜尺寸较小时,反射镜通常是刚性的,但是,随着反射镜尺寸的增大,以及反射镜面密度越来越小,反射镜的柔性越来越大,反射镜的定位和支撑系统将面临更大的挑战。首先,反射镜刚度的下降会导致反射镜更容易受到重力、发射载荷以及装配应力的影响;其次,由于口径的增大,反射镜因环境温度变化及镜体温度梯度而产生的镜面热变形增大,因此,大口径、超轻型反射镜定位和支撑系统面临更大挑战。
2 定位和支撑系统的主要功能
反射镜在加工、检测以及装调等各个阶段都需要定位和支撑系统,光轴方向不同时,反射镜需要的定位和支撑方式不同,本文研究的反射镜在加工状态、装调状态以及发射状态时光轴都是垂直向上的,因此,主要研究反射镜光轴垂直向上时的定位和支撑方式。按照遥感器的工作阶段,定位和支撑系统的功能可以概括为以下几个方面:
(1)地面装调、测试阶段
反射镜在空间失重环境下工作,但加工、检测以及装调都在地面重力环境下进行,因此,在光学系统的装调和测试阶段,反射镜的定位和支撑系统除保证反射镜的位置精度外,还必须能模拟空间失重状态,从而降低重力环境对主镜面形精度的影响。
(2)发射阶段
在发射阶段,光学系统要经受加速度、冲击和振动的影响。这一阶段,定位和支撑系统保证反射镜的安全和位置精度最为重要。
(3)在轨工作阶段
在轨工作阶段,反射镜主要受温度环境的影响,定位和支撑系统在此阶段的主要功能是保证位置精度的同时,减小温度环境变化对反射镜面形精度的影响。因此,应当避免定位系统对反射镜的过定位,避免热环境变化对反射镜产生内应力从而影响反射镜的面形。
3 大口径、超轻型反射镜定位和支撑方案
为满足反射镜定位和支撑的功能,大口径、超轻形反射镜适合采用背部多点定位和支撑的方式,本文主要分析摇板式多点支撑、定位支撑+多点主动支撑和定位支撑+地面卸载支撑3种多点支撑方式。
3.1 摇板式多点支撑
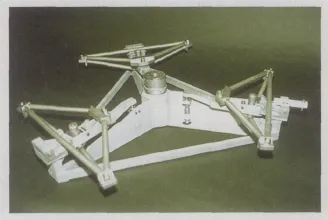
图1 摇板式多点支撑
综合考虑反射镜的定位和支撑在3个阶段的功能,反射镜的定位和支撑系统既要保证反射镜的位置精度,又要消除重力的影响,并且还要保证反射镜具有足够的刚度,能经受恶劣的发射环境。为了消除重力影响,反射镜的轴向必须采用多点支撑,但同时又要避免多点对反射镜造成过定位。“摇板式”(whiffletree)多点支撑,或叫格略伯支撑(Grubb),其实物如图1所示。这种支撑是在3点支撑的基础上发展而来的,基本原理是在已有的3个固定支撑点上分别安装1个三角形托架,托架与基板之间采用球铰链连接(托架可在球状关节处摇动)。在每个三角形托架的顶点上设置支撑点,这样原来的3点支撑变为2层9点支撑。三角形托架之间采用梁连接,连接处采用回转接头。在实际应用中为了保证多点支撑结构的正常工作,每个三角形托架必须在保持自身的平衡的同时,还要防止在自身平面内的旋转。由于浮动支架本身是静定的,因此,作用于镜面的支撑力的大小并不彼此独立,而是服从静力平衡规律,它们的比例可由浮动支架的杠杆比确定[3]。为了避免多点支撑结构对主镜产生力学变形,补偿温度变化对主镜造成的变形,与主镜连接的多个支撑点通常采用柔性支撑结构。
摇板式多点支撑方式的优点在于:由于作用于反射镜的支撑点数量增加,从而使反射镜的自重变形得到改善。难点在于:1)随着反射镜口径的增大,为了消除重力影响,反射镜轴向所需支撑点的数量增大,浮动支架结构层次的增多,使得装配工艺的技术难度变大;2)由于各支撑点之间的支撑力相互关联,使得支撑点位置的优化变得更为复杂;3)由于空间环境下反射镜不受重力的影响,多点支撑很容易对反射镜产生内应力。
摇板式多点支撑方式始终考虑了重力的影响,因此,这种方式特别适用于地面环境下大口径反射镜的支撑。但对于空间应用反射镜而言,由于空间环境下反射镜不受重力的影响,多点支撑方式容易对反射镜造成过约束;另外,从工艺和装配难度来讲,该支撑方式结构复杂,实现难度较大。因此,该支撑方式不适于空间大口径反射镜的定位和支撑。
3.2 定位支撑+多点主动支撑
定位支撑+多点主动支撑方式的基本原理是在3点定位支撑基础上,在反射镜背部增加主动支撑点。主动支撑点一般为一系列致动器,反射镜可通过致动器和刚性良好的支撑背板相连。3点定位支撑主要对反射镜进行定位,即确定并保证反射镜的位置精度。主动支撑点主要实现以下2方面的功能:1)在地面环境下消除重力的影响,相当于重力卸载机构;2)通过对各个致动器施加作用力(拉力或压力),可以控制反射镜的面形,可以在空间环境下校正温度等外界环境变化对反射镜面形的影响,并且可以增加反射镜的刚度,以适应发射时的恶劣力学环境[4-5]。
定位支撑+多点主动支撑的优点在于:1)主动支撑点的加入,一方面可以消除重力的影响,另一方面又可以在轨进行反射镜面形的调整;2)由于反射镜可以在轨进行面形控制,从而降低了对地面实验的要求。难点在于:需要复杂的在轨面形检测、数据处理和控制机构,大大增加了系统的难度和复杂度,而且还会降低系统的可靠性。
3.3 定位支撑+地面卸载支撑
定位支撑+地面卸载支撑的基本原理是:将定位和支撑的功能按照装调、发射和在轨工作3个阶段的实际情况分别考虑,在3点定位支撑方式的基础上,在地面装调阶段增加卸载支撑点,以消除重力影响,定位支撑限制反射镜的6个自由度,保证反射镜的位置精度并能经受发射环境的影响,卸载支撑在地面环境下消除重力对反射镜面形的影响,不参与空间反射镜的定位和支撑,具体如下[6]:
(1)地面装调阶段
遥感器在空间失重环境下工作,但系统的装调是在地面重力环境下进行的,为了消除重力的影响,保证系统的装调精度,因此,必须在地面模拟空间失重环境。
为了模拟空间失重环境,反射镜需要在轴向定位支撑的基础上,增加卸载支撑点,这些卸载支撑点只用于在地面环境下消除重力的影响,不参与最后反射镜的支撑。具体卸载点的个数和排布方式需根据反射镜的具体情况进行分析计算获得。反射镜的卸载装置通常采用气压、水压、机械式的杠杆机构或致动器等装置。为了减小空间环境下定位支撑结构对反射镜产生应力从而影响反射镜的面形,在地面环境下,反射镜的大部分重力由卸载支撑结构承担,定位支撑结构只是起定位作用。
(2)发射阶段
在发射阶段,要求系统能经受加速度、冲击和振动的影响,保证系统在此环境下的安全是最重要的。当轴向定位支撑结构无法满足刚度要求时,可考虑采用辅助支撑(过载保护装置),入轨后可将过载保护装置去除[7]。
(3)空间工作阶段
系统在空间失重环境下工作,应避免对反射镜的过定位。一般在轴向采用3点定位支撑方式,精确限制反射镜的6个自由度,避免对反射镜的过约束。
定位支撑+地面卸载支撑方式的优点在于:1)将反射镜的定位和支撑功能按反射镜的工作阶段分别考虑,简化了定位和支撑系统的设计;2)在地面环境下模拟空间失重环境,降低了反射镜在轨调整和控制的难度;3)空间环境下反射镜采用3点定位支撑方式,精确限制反射镜的6个自由度,避免了温度环境变化对反射镜产生内应力。难点在于:1)为了消除重力的影响,在地面环境下,需要卸载机构;2)由于反射镜在轨不能进行面形的主动控制,因此,对反射镜的面形加工精度、反射镜材料的热稳定性等要求较高。
3.4 适合大口径、超轻型反射镜的定位和支撑方式
由上述分析可知,对于2m口径的反射镜,为消除重力的影响,需要增加支撑点个数。经初步计算,为了保证重力作用下,反射镜的面形变化优于 λ/50rms(λ=0.6328μ m),则需要至少36个支撑点。若采用摇板式多点支撑结构方案,则需要4层摇板式结构,势必造成支撑结构加工、装配的困难和质量的增加。多点定位支撑很容易对反射镜产生过约束,当温度变化时对反射镜产生内应力,造成反射镜面形变化。另外,在空间环境下,反射镜不再受重力的影响,多点支撑应力的释放也会影响反射镜的面形,因此,该支撑方式不适合应用于空间大口径反射镜。
3点定位+多点主动支撑结构是适于空间反射镜的一种支撑方法,但是该方法需要在空间进行复杂的在轨面形检测、数据处理和控制,大大增加了系统的复杂度和难度。
空间定位支撑+地面卸载支撑方式适于大口径、超轻型反射镜的定位和支撑。通过定位支撑保证反射镜的位置精度,并通过优化设计保证反射镜能经受发射环境的影响;通过多点卸载支撑消除地面环境下重力的影响,卸载支撑不参与空间反射镜的定位和支撑。
4 定位支撑的基本原理和实现形式
由上述分析可知,大口径、超轻型反射镜适合采用定位支撑+地面卸载支撑的方式;定位支撑精确限制反射镜的6个自由度,避免在温度环境和力学环境变化时,定位和支撑对反射镜产生内应力,从而影响反射镜的面,并保证反射镜能经受恶劣发射力学环境的影响;卸载支撑主要在地面环境下消除重力环境对反射镜面形的影响,遥感器装调、检测结束后,去除卸载支撑。
4.1 定位支撑的基础原理和实现
理想状态下,定位支撑应精确限制反射镜的6个自由度,图2列出了2种典型的基于精确约束理论的运动学定位支撑结构,开尔文运动定位支撑和博伊斯运动定位支撑。这2种运动学定位支撑结构均采用了球面和平面的配合方式,接触区为点接触,该结构具有较好的重复定位精度和微动力稳定性。但是这种定位支撑结构的结构不封闭,刚性较差,加工成本高,并且加工精度要求高。
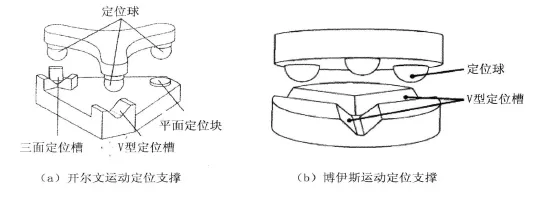
图2 基于精确约束理论的典型支撑结构
为了增加定位的刚度,减少接触应力,同时保证定位的精度,常采用准运动学定位支撑[8]。准运动学定位支撑有2种实现方式。
(1)用线线接触或小面积接触代替点点接触
为了增加运动学定位支撑的刚度,将运动学定位支撑的点点接触用线线接触或小面积接触实现,从而实现准运动学约束,图3为准运动学定位支撑实现方式。
用线线接触或小面积接触代替点点接触,从而实现6个自由度的约束。其定位点的分布和运动学定位相同,3个定位装置间隔120°,且分布在同一个圆上,3个定位点构成1个等边三角形且定位槽的轴线相交于物体的质心处,这样具有较好的刚度和稳定性。定位装置包括定位球和具有对称结构的定位槽,定位球和定位槽之间通过小面积接触实现精确定位,具体实现形式有图3所示的A、B两种方式。这2种方式都是通过在定位块或定位槽中切除一部分,实现定位块和定位槽在一个方向对称两点的很小面积的接触,从而实现准运动学定位支撑。
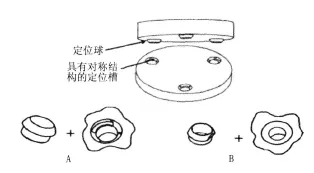
图3 准运动学实现方式
(2)柔性支撑
柔性定位和支撑是在有过约束的方向上,通过柔性环节加以消除,是准运动学定位支撑的一种,但是并不能完全消除过约束。常用的柔性环节按自由度分为柔性转动铰链、弹性移动副、虎克铰和球铰。
柔性支撑的典型方式是3点Bipod定位支撑,由6根两端带铰的空间杆构成3组Bipod结构,1根2端带铰的空间杆具有一个约束,6根杆约束了镜子的6个自由度,实现反射镜的准精确定位。
4.2 卸载支撑的基本原理和实现
由于反射镜在空间失重环境下工作,但是反射镜的加工、检测和装调都在重力环境下进行,在地面环境下必须采取重力卸载措施。重力卸载措施的主要功能是消除重力环境对反射镜面形的影响。常用的重力卸载方法包括以下4种:
1)机械杠杆卸载。通过重锤可以方便地控制不同卸载支撑点的支撑力,并且卸载支撑去除方便,适合反射镜光轴垂直以及水平等不同方位时反射镜的重力卸载。
2)致动器卸载。常用的为压电陶瓷致动器,即通过控制压电陶瓷致动器的电压,实现不同的支撑力。适合反射镜光轴垂直以及水平等不同方位时反射镜的重力卸载。
3)气囊(气袋)卸载。一般用于反射镜光轴垂直时消除重力的影响。气囊容易构成压力均匀的连续支撑,是理想的大型反射镜卸载支撑方式,支撑力可以通过人为进行调节控制。
4)水银带和钢带卸载。这种卸载方式一般用于光轴水平时反射镜的侧支撑。
以上4种卸载支撑方式各有优缺点,一般反射镜在检测和装调阶段适宜采用机械杠杆或多点致动器卸载方式。通过这些卸载支撑点模拟重力环境,使在空间环境下,由3个定位支撑点造成的反射镜面形变化在技术要求的范围内。
5 结束语
大口径、超轻型反射镜适合采用定位支撑+卸载支撑的定位和支撑方式,定位支撑主要用来保证反射镜的位置精度,并能经受恶劣发射力学环境的影响,为了精确限制反射镜的6个自由度避免过定位对反射镜的面形产生影响,定位支撑应采用准运动学定位支撑方式。卸载支撑主要在地面环境下消除重力对反射镜面形的影响,为了方便加载和去除,适宜采用压电陶瓷致动器进行卸载。
[1]Nick Woolf.The Path to Life Finder[C].NASA Institute for Advanced Concepts,2000,1:551-600.
[2]胡企千.大型光学镜子的结构、支撑及重力变形计算方法[J].光学机械,1980,6(31):29-44.
[3]Yoder P R,Jr.Opto-Mechanical Systems Design[M].SPIE PRESS,2000:483-484.
[4]于洋,曹根瑞.主动光学反射镜面形的校正能力及其优化设计[J].北京理工大学学报,2003,23(2):229-233.
[5]姜文汉.自适应光学与能动光学[J].云光技术,1997,26(2):73-79.
[6]陈志平.空间太阳望远镜的结构分析与主桁架试验研究[D].博士学位论文,中国科学院国家天文台,2004.
[7]刘梅,胡企千.空间太阳望远镜1m主镜支撑结构的研究[J].天文研究与技术,2004(6):99-106.
[8]Culpepper M L.Design of quasi-kinematic couplings[J].Precision Engineering,2004(28):338-357.