采用循环相位相关的LPT景像匹配算法
2010-06-05李向阳齐浩程
雷 蕾,李向阳,齐浩程
(1.中国飞行试验研究院,西安 710089;2.西安应用光学研究所,西安 710065)
0 引言
景像匹配辅助惯性组合导航系统中,由于景像匹配过程需要结合惯性导航系统信息和气压高度表信息来获得当地的数字地图,因此必然引起图像间的相应误差。
以中等精度惯性导航系统为例,在没有任何外部修正信息的情况下,其航向偏差将达到10(°)/h,而气压高度表的精度则相对较高,且其误差随飞行高度呈近似线性变化,一般气压高度表的误差对尺度方面的影响仅仅在正负1.1倍左右[1-3]。
因此,考虑到实际情况,可作出假设:实时图相对基准图的旋转角ϖ为任意大小;实时图相对基准图的尺度变化h为[0.9~1.1]。
基于对数极坐标变换(LPT)的景像匹配算法能够一定程度地解决这种平移和旋转变换。但是其中的关键步骤——变换图匹配算法,目前常用的有绝对差和相关算法[4]、灰度投影法[5],其匹配精度较差。频域相位相关法检测图像平移效果较好[6],本文通过改进,得到一种性能良好的基于循环相位相关法的LPT景像匹配算法。
1 对数极坐标算法
对数极坐标变换(LPT)表示为[7-8]

如果图像上两点的极坐标满足

则对数极坐标的关系为

对于整幅图像而言,LPT的旋转不变性可以这样解释:对于以原点为中心发生了旋转的同一场景图像,经过LPT转变为变换图的水平循环平移,如图1所示。尺度不变性可以解释为:LPT把尺度变换转变为变换图垂直方向的线性平移,如图2所示。
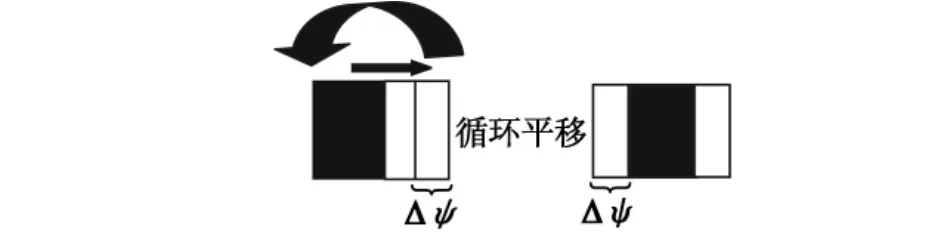
图1 变换图之间的关系(旋转畸变)Fig.1 The relationship between the transformation charts(rotation distortion)
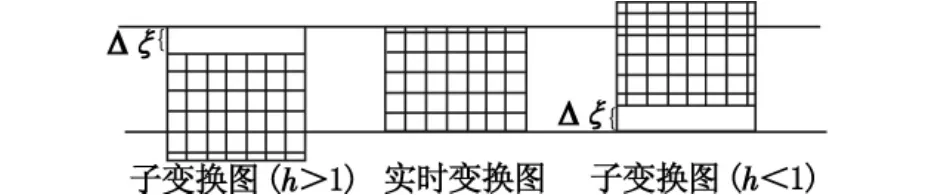
图2 变换图之间的关系(尺度畸变)Fig.2 The relationship between the transformation charts(scale distortion)
已知Δξ,Δψ,可以求出尺度变换参数h和旋转角度ϖ:

2 循环相位相关法[9]
设 g(i,j)为参考图,f(i,j)为实时图,G(u,v),F(u,v)分别为它们的傅里叶变换。它们的互功率谱为G×F*(其中*表示函数的复共轭),则这个互功率谱的相位为

ψg、ψf分别为两图的相角。
相位相关函数cp定义为

其中:IDFT表示傅里叶逆变换。
傅里叶变换的“相移定理”在有限长的DFT中表示为:如果f(i,j)的大小为M*N,将它沿水平和垂直方向分别循环移动 a,b 个单位得到 g(i,j),即g(i,j)=f(i-a,j-b)。它们频域满足关系式:

带入式(6)可得:

根据式(7)可以求得:

式中:δ(i- a,j- b)是冲击函数,它在[a,b]处的值为1,其余值为0。
显然,当两幅图像存在循环平移关系时,它们的相位相关面在平移点处有唯一的一个峰,且值为1。
循环相位相关法步骤:
1)将相关运算转化为卷积运算,先将f进行翻转

2)分别计算 g 和 f′的 2DFT,得到 G(u,v),F*(u,v);
3)将 G(u,v),F*(u,v)代入式(6)、式(7),计算相位相关面cp。
循环相位相关法在两幅图像存在循环平移时能得到最理想的脉冲相关面。原因在于,循环相位相关法将两个信号的时域卷积计算转化为频域乘积。按照DFT的性质,这里的卷积是循环卷积关系,所以最后得到了两幅图像的循环相关关系。而经典相位相关法为了防止混叠,将g和f′首先进行零扩展,最终得到两幅图像的线性平移关系。
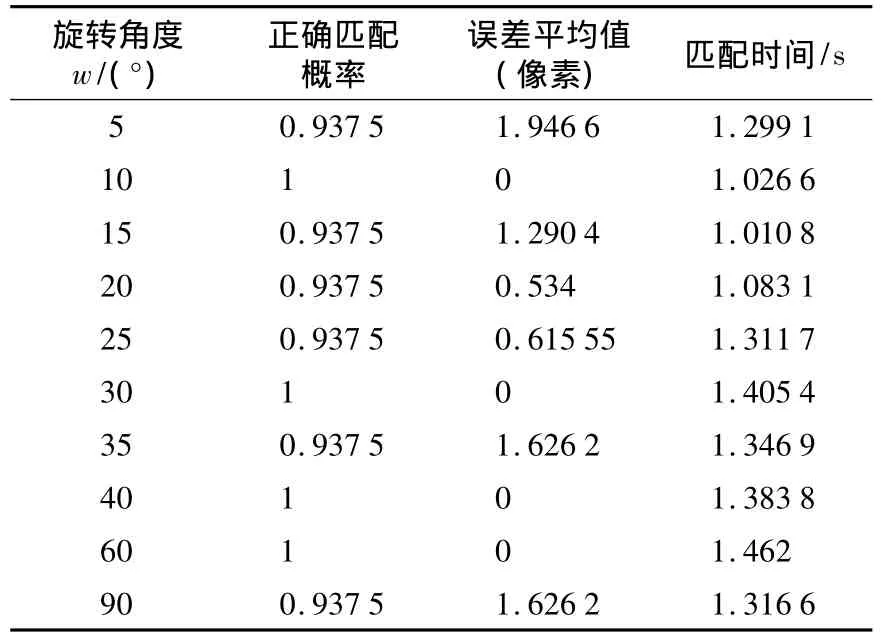
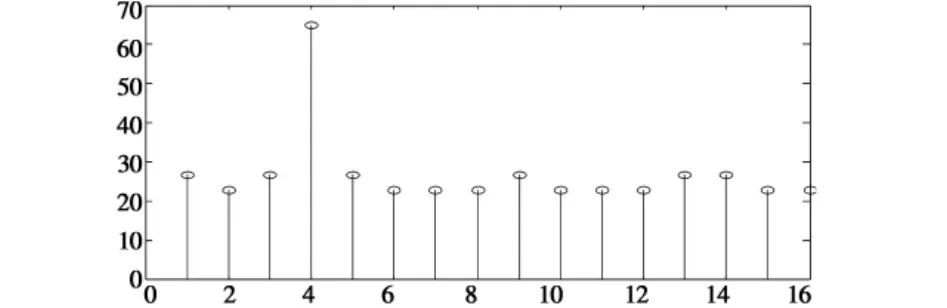
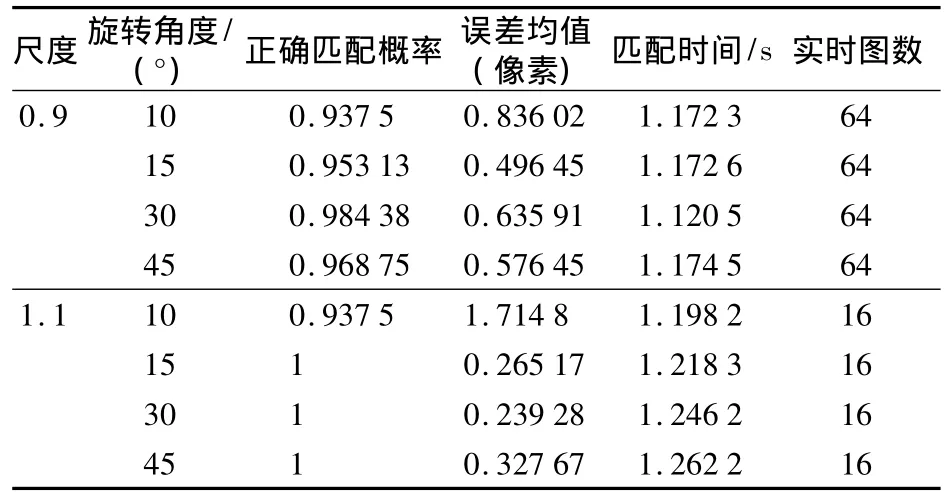
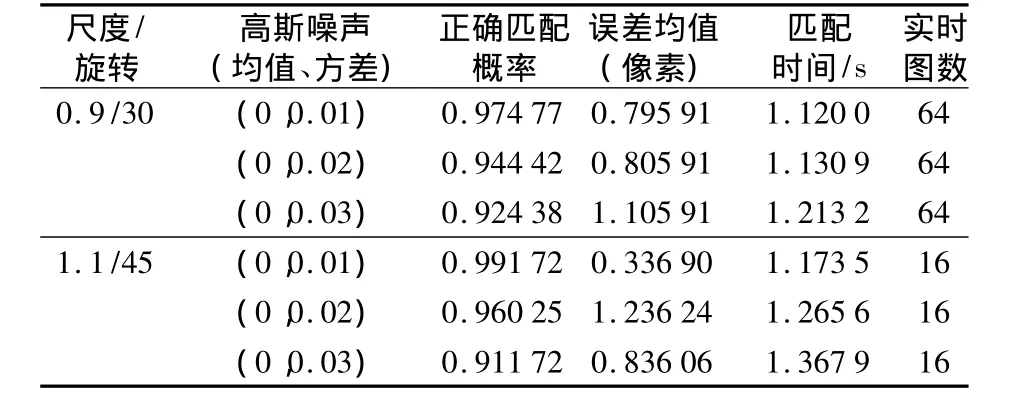
已设定0.9 设图J和S分别表示基准图和实时图,大小为m1×n1和 m2×n2(m1≥m2,n1≥n2)。 1)取S的内切圆图像,作为实时图模板Sm; 2)以Sm的中心为原点,选取变换参数k、L,进行对数极坐标变换,得到实时变换图St; 3)按逐行逐列的顺序,以基准图每个可能的点(i,j)为中心,截取相同大小的圆,同样以参数k、L进行对数极坐标变换,得到一系列基准变换子图Jzt(i,j); 4)将实时变换图st和不同位置的Jzt进行相位相关计算,记录它们的相关面Cij峰值的大小和峰值点坐标[aij,bij]; 5)这些峰值组成了度量值矩阵D。D中值最大点对应的子图就是实时图在基准图中的位置(); 仿真实验流程如文献[10]中所示。基准子图尺寸选择和实时图大小相同,选用大小为90×90的基准图。以5×5为步长,在基准图中截取大小51×51的实时图。设定误差在两个像素以内就是正确匹配。算法的性能指标:匹配概率、匹配精度、匹配处理时间的计算都如文献[11]所述。计算机为PC机Pentium(R)4 CPU 2.80 GHz,编程环境为Matlab6.5。 实验1:算法抗旋转性能。 算法使用隔两行隔两列的搜索方式。实时图相对于基准图旋转角度w分别取5°~90°。结果如表1所示。这种方法对于旋转变化具有极好的鲁棒性。匹配精度达到93.75%以上,匹配时间在1.3 s左右。 表1 旋转畸变下算法的匹配性能Table 1 The matching performance of algorithm with rotation distortion 分析误差产生的原因可以发现,由于采用的是隔两行隔两列的搜索方法,采样点如果落在正确匹配点邻域对角线位置处,该点的相关峰值比绝大多数点的峰值大,但是也很可能比少数某几点的小,这样就会产生错误的定位结果。解决的方法之一是:计算相关面的最高峰和次高峰8邻域内点的相关峰值,它们中的最大值对应位置就是正确匹配点。这将在后续的研究中进行。 此外,这种方法还可以检测到实时图相对于基准图的旋转角度。图3显示当w=25°时,由该算法计算得到的16幅实时图的旋转角度。 图3 旋转角度计算结果Fig.3 The computed result of rotation-angle 试验2:旋转和缩放都存在的情况下算法的性能,结果如表2所示。 实验3:噪声存在下算法的性能,结果如表3所示。 表2 旋转/尺度变化下算法的匹配性能Table 2 The matching performance of algorithm with scale and rotation distortion 表3 噪声存在下算法的匹配性能Table 3 The matching performance of algorithm with noise 显然在两种畸变同时存在以及有高斯噪声的情况下,本算法的匹配性能均良好。 实验结果表明,本文提出的基于循环相位相关的LPT匹配算法能够有效地抵抗小范围的尺度变化、任意的旋转和噪声畸变。 存在的问题是,算法的实时性还有待于提高。可以肯定,采用各种弹载嵌入式系统实现,速度会进一步提高。此外,对于小尺度畸变情况下,循环法较原法好的理论原因尚不明确,这将是下一步研究的主题。 [1]刘建业,冷雪飞,熊智,等.惯性组合导航系统的实时多级景像匹配算法[J].航空学报,2007,28(6):1401-1407. [2]秦永元.惯性导航[M].北京:科学出版社,2006. [3]屈重君,陆志东,雷宝权.惯性/景像匹配组合导航系统的误差校正研究[J].电光与控制,2008,15(4):70-73. [4]张伟,任仙怡,张桂林,等.基于对数极坐标变换和仿射变换的目标识别定位方法[J].中国图象图形学报,2006,11(9):1255-1259. [5]李富裕.非均匀性映射变换技术在景像匹配相关器研究中的应用[D].西安:西北工业大学,2007. [6]高扬.基于相位相关的亚像元目标定位方法研究[D].哈尔滨:哈尔滨工业大学,2006. [7]MASSONE L,SANDINI G,TAGLIASCO V.“Form-invariant”topological mapping strategy for 2D shape recognition[J].CVGIP,1985,30:169-188. [8]孙小炜,李言俊,陈义.一种新的红外目标跟踪算法[J].宇航学报,2008,29(5):1637-1642,1647. [9]GONZALAZ R C,WOODS R E.数字图像处理[M].阮秋琦,阮宇智,译.北京:电子工业出版社,2005. [10]杨小冈,缪栋,曹菲.一种实用的景像匹配仿真方法[J].系统仿真学报,2004,16(3):363-366. [11]赵锋伟.景像匹配算法、性能评估及其应用[D].长沙:国防科学技术大学,2002.3 景像匹配算法流程
4 实验和结果分析
5 结论
