六相感应电机直接转矩控制系统*
2010-06-02肖蕙蕙
郑 剑, 肖蕙蕙, 李 山
(1.湖南机电职业技术学院,湖南长沙 410151;2.重庆理工大学,重庆 400050)
0 引言
电压源型逆变器驱动的六相感应电机的物理模型如图1所示。逆变器的64种基本开关状态被映射到机电能量转换子空间(dq子空间)和零序子空间(z1z2,o1o2子空间),即为64个综合电压矢量,如图2所示。传统的六相感应电机直接转矩控制(Direct Torque Control,DTC)系统在每个控制周期内选择dq子空间12个最大矢量中的某一个去控制逆变器和感应电机,从而将定子磁链和转矩控制在相应的滞环带内[1]。该控制策略可以对dq子空间的伏秒进行控制,但不能在一个周期内使z1z2子空间的平均伏秒为零,z1z2子空间的谐波电流可以随意流动。虽然这些谐波电流在双三相绕组中产生的转矩脉动方向相反,在一个周期内相互抵消,但谐波电流相当大,将导致调速系统的体积和成本增加。
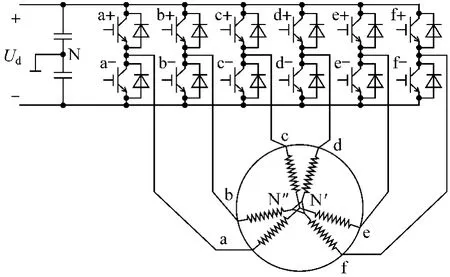
图1 电压型逆变器驱动的六相感应电机
为了解决这一问题,本文对准“定子电流谐波最小”这一控制目标,选择dq子空间12个最大矢量进行合成,得到12个零序平衡矢量。在此基础上,优化设计出一种新型六相 DTC系统,使z1z2,o1o2子空间的定子谐波电流小,从而有效控制定子损耗、减小转矩脉动。最后在Simulink环境下建立该系统的仿真模型,进行仿真试验研究。
1 零序平衡电压空间矢量[2]
由图2可知,dq子空间幅值最大的12个矢量 48、56、60、28、12、14、15、7、3、35、51、49,在 z1z2和o1o2子空间上幅值却最小,因此在z1z2和o1o2子空间会产生最小的谐波电流。选择dq子空间幅值最大的12个矢量进行线性组合,这样可获得高的电压利用率,并可实现转矩和磁链的快速控制;同时可使z1z2,o1o2子空间的谐波电流小,从而有效控制定子损耗,并减小转矩脉动。
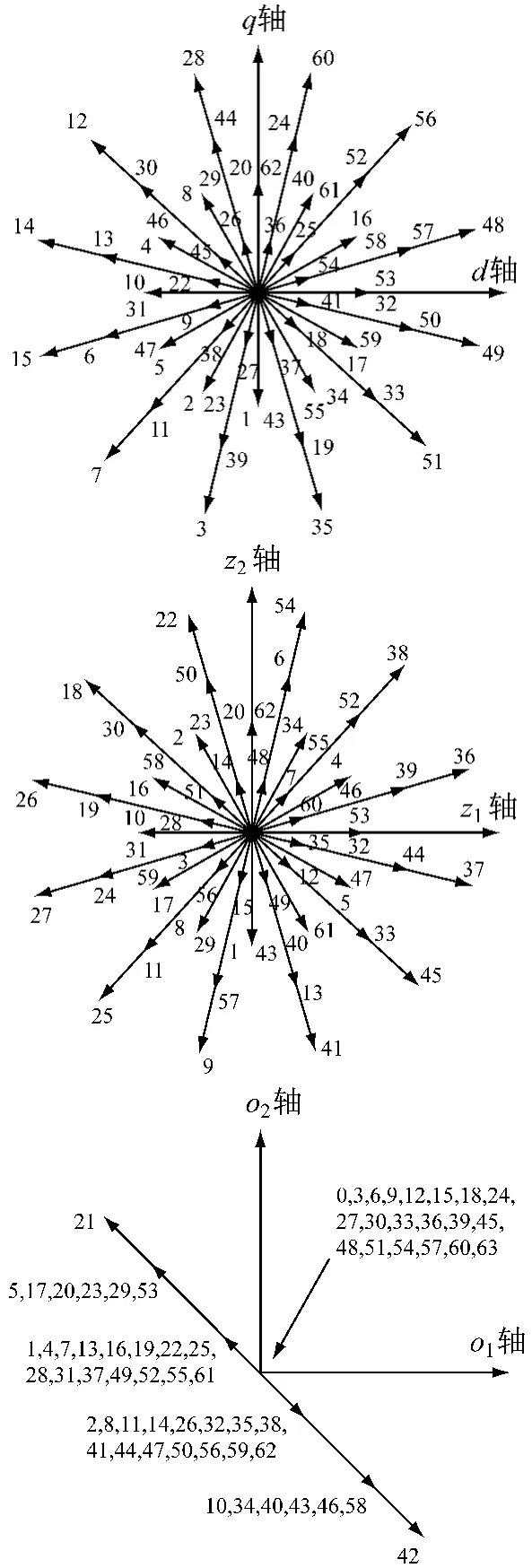
图2 六相逆变器的64种开关状态在三个子空间的映射
选择12个最大矢量中任意三个毗邻矢量,可以合成一个新矢量。若三个毗邻矢量的作用时间符合一特定比例,则可使新矢量在z1z2子空间的平均电压为零。譬如选择毗邻矢量49、48、56,设总的作用时间为Ts,欲使z1z2子空间的平均电压为零,根据伏秒平衡原则,有:

解之得:

求出毗邻矢量49、48、56的作用时间后,即可求出新矢量在dq子空间的幅值U′和位置。若取调制度为 1,则[3]:
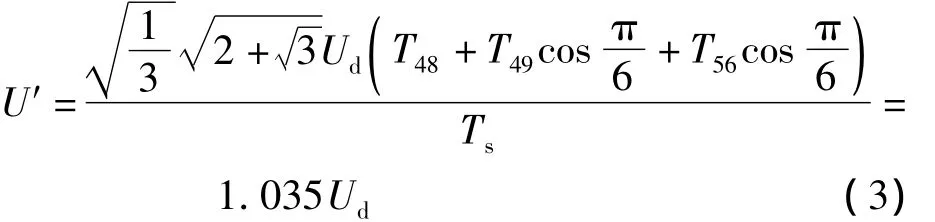
新矢量的位置与矢量48的位置是一致的。
依照此法可得到12个新矢量,分别用 U1′,U2′,…,U12′表示,它们幅值相等,位置互差 π/6,如图3所示。由于新矢量在z1z2子空间的平均伏秒为零,可使定子6k±1次谐波电流得到有效抑制,因此本文将这12个新矢量称为零序平衡矢量。
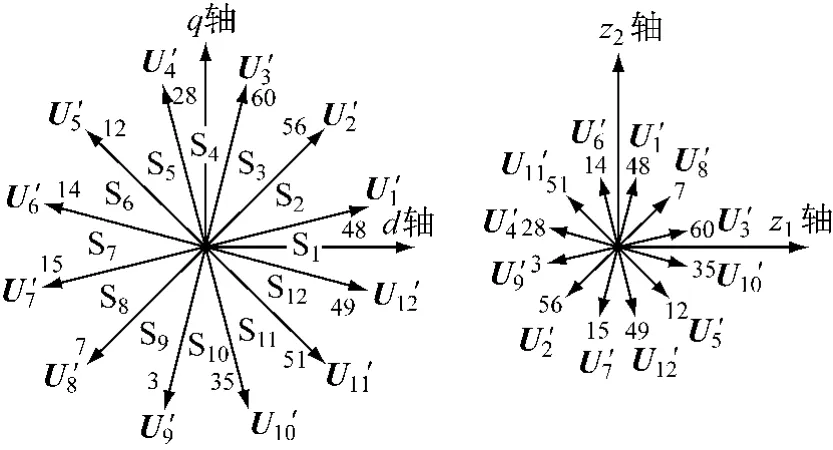
图3 dq子空间的12个最大矢量、12个零序平衡矢量、12个扇区示意图
2 新型六相DTC系统的设计[4]
2.1 总体设计
系统的原理框图如图4所示,逆变器和感应电机被视为一个整体,因此系统主要由磁链和转矩观测器、磁链和转矩调节器、逆变器开关表这三大部分组成,其中磁链和转矩调节器、逆变器开关表构成非线性控制器[5]。
因此,系统设计的三个主要问题是:(1)磁链和转矩观测器的设计;(2)磁链和转矩调节器的设计;(3)逆变器开关表的设计。前两个问题采用常规设计,不赘述;第三个问题采用优化设计。
2.2 逆变器开关表的的优化设计
逆变器开关表的设计包括三张表的设计:(1)零序平衡矢量输出表;(2)综合矢量输出表;(3)开关器件驱动信号输出表。第三张表的设计比较简单,本文关注的是前两者。
利用12个零序平衡矢量将dq子空间划分为12个扇区,如图3所示。当磁链矢量Ψs位于第Ⅰ扇区,且正向旋转(逆时针旋转)时,12个零序平衡矢量对磁链幅值Ψs和转矩Te的影响如表1所示。表中箭头↑↑↑或↓↓↓表示快速增大或快速减小,↑↑或↓↓表示较快增大或较快减小,↑或↓表示增大或减小。

表1 零序平衡矢量对磁链幅值和转矩的影响(当磁链矢量位于第Ⅰ扇区,且正向旋转时)
由于每个电压矢量对转矩和磁链幅值同时产生作用,基速以下,只有磁链幅值恒定,才能获得最快的转矩响应。为此,按照转矩优先磁链的原则选择零序平衡矢量,在磁链幅值和转矩均未达到给定值时,优先控制转矩。因此优化选择的4个零序平衡矢量为 u3′、u5′、u9′、u11′。
当磁链矢量位于其他扇区时,用同样的方法可以优化选择对应的4个零序平衡矢量。再综合QTe、QΨs、sector这三个控制量,得到零序平衡矢量输出表,如表2所示。表中u0x表示4个零综合矢量u0、u21、u42、u63中的某一个,具体选择哪一个,需要再结合上一个控制周期所施加的电压矢量 ,并遵循“最小开关损耗原则”。在Simulink仿真中可以不用考虑开关损耗,因此在仿真中为简单起见,u0x都选择 u0。

表2 零序平衡矢量输出表
表2输出的信息是12个零序平衡矢量和4个零综合矢量中的某一个。每一个零序平衡矢量又对应着3个综合矢量以及这3个综合矢量的作用时间与作用次序。作用时间Tx、Ty、Tz由式(2)确定;作用次序有多种方案,本文采用相同顺序模式。设计的综合矢量输出表,如表3所示,它输出的信息是12个最大综合矢量中的某一个。Tx、Ty、Tz分别表示第一、二、三个综合矢量的作用时间。

表3 综合矢量输出表
3 新型六相DTC系统的仿真[4,6]
建立基于零序平衡矢量的六相DTC系统的Simulink模型。电机参数如下:额定功率5 500 W,额定相电压86 V,额定频率50 Hz,磁极对数 3,转动惯量 0.116 kg·m2,定子电阻0.22 Ω,转子电阻 0.47 Ω,定子电感 0.039 5 H,转子电感0.039 5 H,定转子互感0.036 4 H。其他参数:逆变器直流侧电压Ud=210 V,采样时间Ts=0.000 1 s。
根据上述参数,分别对基于零序平衡矢量的六相DTC系统、基于12最大矢量的六相DTC系统进行对比仿真试验:空载起动,0.3 s施加负载20 N·m,得到的转速、转矩、定子磁链轨迹、a相定子电流、a相定子电流的FFT分析[6]、三个子空间电流的曲线分别如图5、6所示。
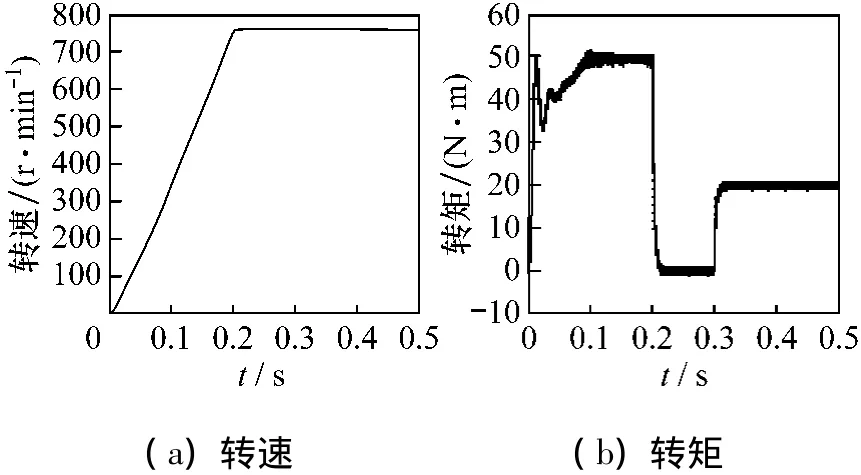
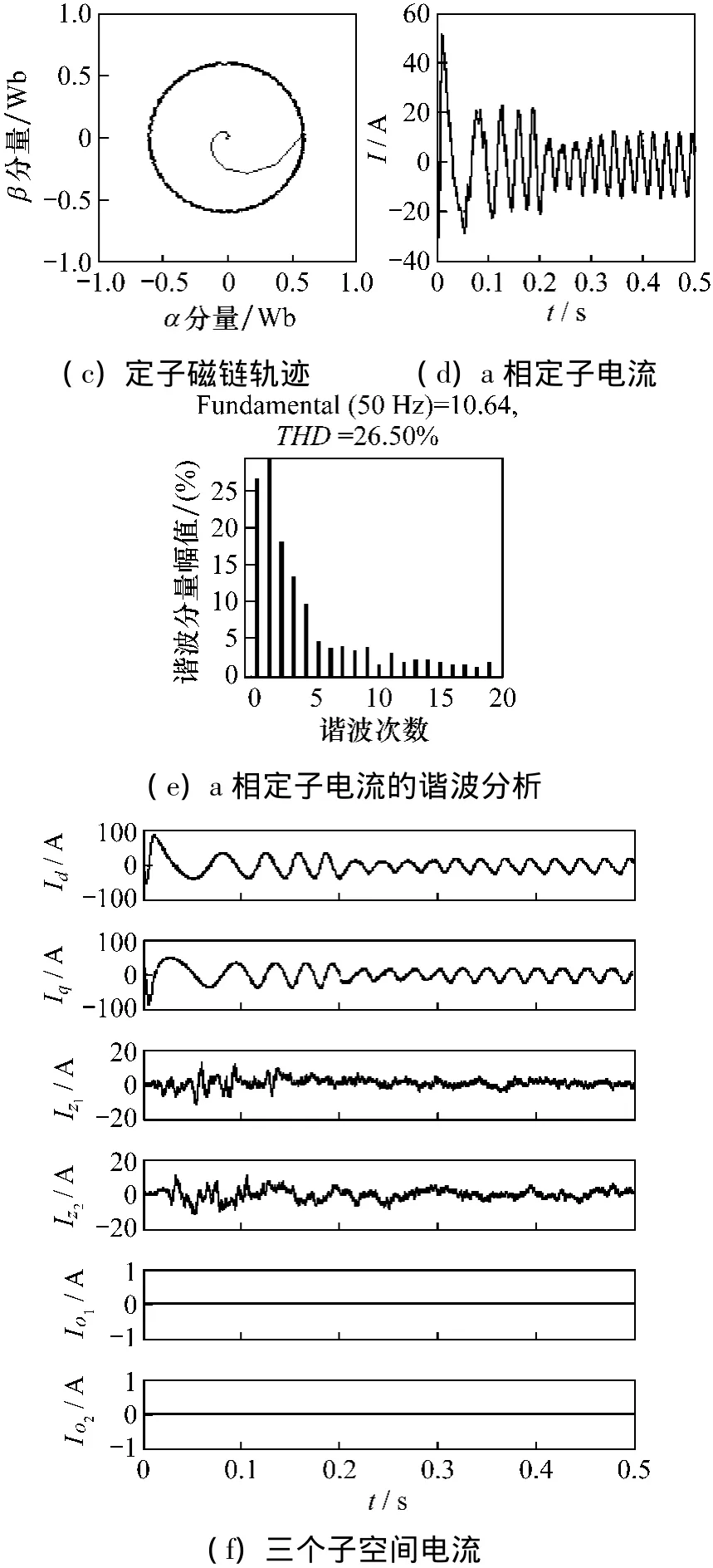
图5 基于零序平衡矢量的六相DTC系统的仿真结果
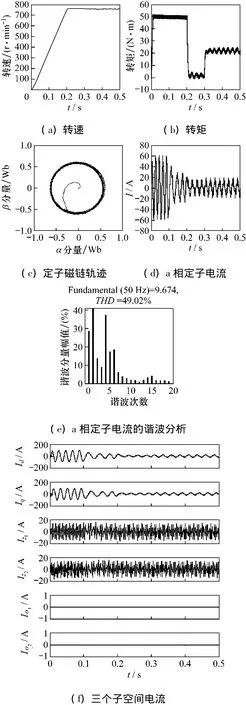
图6 基于12最大矢量的六相DTC系统的仿真结果
对比分析两种系统的仿真曲线可知:两种系统的定子磁链轨迹都为圆形。传统系统的转速曲线0.3 s后有脉动;转矩曲线0.2 s后有周期性脉动,脉动范围为8 N·m;a相定子电流0.3 s后有明显谐波,FFT分析表明THD=49.08%;z1z2子空间电流为-20~20 A,定子谐波电流较大。新型系统的转速曲线无脉动;转矩曲线的脉动较小,脉动范围为2 N·m;a相定子电流0.3 s后没有明显谐波,FFT分析表明THD=26.50%;z1z2子空间的电流为-5~5 A,定子谐波电流较小。因此,设计的系统能够有效减小定子电流谐波和转矩脉动。
4 结语
针对六相感应电机传统DTC系统的定子电流谐波较大、转矩脉动较大的问题,在六相感应电机的动态数学模型、SVPWM算法、基本DTC系统的基础上,设计出一种基于零序平衡矢量的六相DTC系统。在Simulink环境下建立了该系统的各部分仿真模块和总体仿真模型,仿真结果表明,设计的系统能够有效减小定子电流谐波和转矩脉动,从而验证了所提出的控制策略的正确性、有效性。以此为基础,可以对六相感应电机变频调速系统展开更深入的研究。
[1]K Gopakumar,V T Ranganathan,S R Bhat.Splitphase induction motor operation from PWM voltage source inverter[J].IEEE Transaction on Industry Applications,1993,29(5):927-932.
[2]Li Shan,Xiao Hui Hui.The research of SVPWM control technique of double three-phase induction [J].IEEE Trans Energy Conversion,2004,1(3):109-114.
[3]D G Holmes,T A Lipo.电力电子变换器PWM技术原理与实践[M].周克亮译.北京:人民邮电出版社,2010.
[4]郑剑.六相感应电机直接转矩控制系统的研究[D].重庆:重庆工学院,2008.
[5]阮毅,陈伯时.电力拖动自动控制系统——运动控制系统[M].4版.北京:机械工业出版社,2010.
[6]艾永乐,M J Kamper,王玉梅.六相交流感应电机新颖控制策略研究[M].北京:中国电力出版社,2009.