雷达天线运动参数的自动测量
2010-04-26初晓军冯电春
初晓军,王 勇,冯电春
(海军航空工程学院青岛分院,山东 青岛 266041)
1 引 言
随着部队装备现代化建设的发展,对武器装备自动化检测的要求越来越高,而天线运动参数,诸如天线俯仰运动范围、方位扇扫范围、方位扇扫速度、圆扫速度等参数的自动化测量是组建雷达ATS的一个关键问题[1]。因为此类参数传统的测量方法是采用量角器和秒表之类的仪器人工完成的,操作起来不仅繁琐而且测量数据存在较大的离散性误差,不符合自动测试的要求。该文利用数字技术和计算机技术实现了雷达天线运动参数的自动测量,简化了测量方法,提高了测量速度和精度,在实际工作中取得了很大效益。
2 测量原理
2.1 天线俯仰控制的测量
雷达天线俯仰控制通常采用电位器作控制机构,通过旋转电位器旋钮送出不同的控制电压控制天线俯仰停在相应的角度。俯仰角度解调电路输出解调电压代表对应的角度。
天线俯仰控制的自动测量,采用计算机技术通过控制D/A送出俯仰控制电压取代电位器送出的电压控制天线俯仰运动,通过A/D采样俯仰解调电压获取天线俯仰角度值代替人工读数。根据送不同控制电压,采样对应的角度值,实现了天线俯仰控制的自动测量[2]。
2.2 天线方位扇扫范围的测量
某雷达天线方位角读输出采用脉冲间隔表示,即用角开脉冲、角关脉冲两个脉冲的时间间隔表示天线方位角度,同时雷达输出表示天线正扫和回扫的正回扫信号,高电平代表天线方位扇扫处于正扫状态,低电平代表天线方位扇扫处于回扫状态。采用计数器录取角开脉冲与角关脉冲的时间间隔,并用锁存器锁存计数器最后的计数值,得到天线方位的实时角度Φ。此角度值随天线方位角度的变化而实时变化。正回扫信号从低电平变化到高电平时,表示天线方位处于扇扫的左边界,录取此刻的角度值得到天线方位左边界的角度值ΦL。正回扫信号从高电平变化到低电平时,表示天线方位处于扇扫的右边界,录取此刻的角度值得到天线方位右边界的角度值ΦR,则天线方位扇扫范围可通过ΦR-ΦL得到。
2.3 天线方位扇扫速度的测量
正回扫信号的周期,即持续一个完整的高电平、低电平的时间,代表了天线方位扇扫一次所需的时间。采用计数器得到正回扫信号的周期T,则天线方位扇扫速度w=1/T,从而实现了天线扇扫速度的自动测量。
2.4 雷达天线圆扫速度的测量
天线在圆扫状态下,天线方位角度Φ在0°≤φ<360°范围内与天线方位的刻度是一一对应的,因此采用 Φ 与固定角度值 θ(0°≤θ<360°)比较,当Φ=θ时输出等值脉冲信号,该等值脉冲信号在天线圆扫一周的情况下仅出现一次。两个等值脉冲信号的间隔即为天线圆扫一周所用的时间τ,则天线圆扫速度Ω=1/τ,从而实现了天线圆扫速度的自动测量。
可见,要实现天线运动参数的自动测量,须在电路中设计出能捕捉到天线运动到临界位置的转换信号并进行锁存,以便计算机能够正确读取和计算,从而实现雷达自动测试系统的要求。
3 实现方法
3.1 系统框图
天线运动参数测量系统框图如图1所示。图1中,D/A转换器完成天线俯仰控制电压的输出,控制天线俯仰运动到控制电压对应的角度。A/D转换器完成天线俯仰解调电压的采样,以得到天线俯仰角度信息。FPGA用来实现计数器对天线方位角度的录取、正回扫信号周期的计数以及天线圆扫一周所用时间的测量。模拟接口电路采用光耦合器完成模拟电路和数字电路的隔离和电平转换[3-5]。
3.2 电路实现
在天线俯仰控制的自动测量中D/A转换器选用PXI-6704实现,主控机通过控制PXI-6704模拟旋转电位器旋钮送出不同的控制电压控制天线俯仰运动以停在相应的角度。天线俯仰运动产生的俯仰解调电压经A/D转换器AD390处理后变为并行数据,由数据总线接口送至通信控制模块,经过CPU 80C186的运算处理得到对应的角度信息以串行数据的形式送到接口总线上,主控机通过控制PXI-8420可直接读出该角度信息,从而实现天线俯仰运动的自动化测量[6-7]。
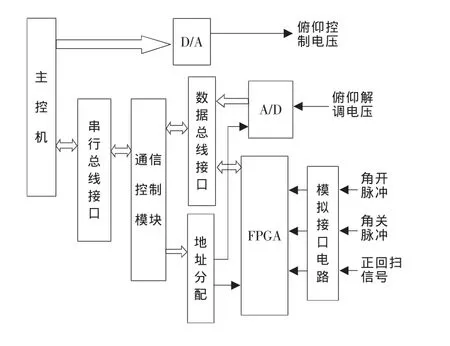
图1 天线运动参数测量系统框图
天线方位扇扫范围、扇扫速度、旋转速度的测量主要由FPGA XC3090A设计实现,测量结果经CPU读取并处理后通过PXI-8420回传到主控机。图2为FPGA电路的实现框图。图中波门产生电路产生计数器1的计数波门,角开脉冲上升沿数波打开计数波门,角关脉冲上升沿关闭计门。锁存器1存储的是角开脉冲与角关脉冲的时间间隔(DA)。锁存清零信号产生电路输出相应的计数器1的清零信号和锁存器1的锁存信号。从时间关系上,锁存信号在清零信号之前。
锁存信号产生2电路在正回扫信号的前沿产生锁存器11的锁存信号,锁存天线方位扇扫左边界的方位角度值;在正回扫信号的后沿产生锁存器12的锁存信号,锁存天线方位扇扫右边界的方位角度值。
角开脉冲与角关脉冲的时间间隔(DA)与固定的角度值D通过比较器比较产生等值脉冲,等值脉冲二分频后形成天线方位圆扫时间的计数波门。该计数波门与正回扫信号二分频形成天线方位扫描时间的计数波门通过选择器选择其一作为计数器2的计数波门。选择器的选择信号由CPU的地址信号控制。锁存器2存储的为天线方位扇扫时间或天线方位圆扫时间。对应的锁存清零信号产生电路输出对应的锁存信号和清零信号。
锁存器11、锁存器12、锁存器2输出的数据分别通过三态门1、三态门2、三态门3接至CPU的数据总线(DB),三态门的选通信号由地址译码产生。CPU通过数据总线读入锁存器的数据,进行相应处理以求取各参数值。

图2 FPGA电路框图
3.3 软件算法与误差分析
CPU读回数据后,通过运算可计算出天线方位扇扫范围、扇扫速度、圆扫速度等参数。由于时间间隔与角度成线性关系(设比例系数为k),如果计数器的时钟频率为f MHz,则锁存器数值为D时对应的角度关系为:θ=kD/f(°),这样就可以根据计数器1的时钟频率、锁存器11、锁存器12的数值计算出天线的扇扫范围。
同理,根据计数器2时钟频率f2MHz、锁存器2的数值D2,计算出天线的扇扫速度和圆扫速度,其表达式为w1=60×106·f2/D2(次/min)。
由于采用计数器测量时存在±1误差,同时计数器的时钟频率决定了测量误差的大小。如果雷达工作时天线旋转一周所用时间为240μs,即K值取1.5,在计数器的时钟频率为20MHz的情况下,测量天线扇扫范围的误差只有0.15°;在计数器2时钟频率为1250Hz,锁存器2的数值D最大值为5000时,测量天线的扇扫速度和圆扫速度的误差只有0.003次/min,这远远低于技术说明书的误差要求。
4 结束语
天线运动参数自动化测量的设计方案已在某型雷达的自动测试系统的组建中得到具体应用,同传统的手工测量方法相比,该方法简化了测量步骤,降低了人为因素的影响,提高了测量速度和精度,可靠性高,稳定性强,具有较高的应用价值,这不仅为雷达设备的自动测试提供了通用的设计方法,而且可为其他电子设备ATS的组建提供有益的借鉴。
[1] 李淑华,彭志刚,郭微波.航空雷达设备[M].青岛:海军航空工程学院青岛分院出版社,2008.
[2] 初晓军,王 勇.航空雷达检测技术[M].青岛:海军航空工程学院青岛分院出版社,2009.
[3] 王 勇,李淑华,王守权.雷达自动测试诊断系统的组建与实现[J].仪器仪表学报,2006(12):32-34.
[4] 王 勇,王晟达,彭 芳,等.基于PXI和GPIB总线雷达自动测试系统的设计[J].空军工程大学学报,2004(12):57-61.
[5]李洪烈.某型雷达自动测试系统关键技术研究[J].电子测量与仪器学报,2006(20):1344-1347.
[6] 杨江平.电子装备维修技术与应用[M].北京:国防工业出版社,2006.
[7] 宋万杰,罗 风,吴顺君.CPLD技术及其应用[M].西安:西安电子科技大学出版社,1999.
[8] 丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,2000.
[9]Skolnik,M.I.雷达手册[M].王 军,译.北京:电子工业出版社,2003.
[10]丁鹭飞,张 平.雷达系统[M].西安:西北电讯工程学院出版社,1984.