基于ANFIS的汽车发动机振动参数故障诊断云模型
2010-04-11孔莉芳
孔莉芳,张 虹
KONG Li-fang1,2, ZHANG Hong1
(1. 中国矿业大学 信电学院,徐州 221006;2. 徐州空军学院,徐州 221000)
基于ANFIS的汽车发动机振动参数故障诊断云模型
The vibration parameter fault diagnosis cloud model for automobile engine based on ANFIS
孔莉芳1,2,张 虹1
KONG Li-fang1,2, ZHANG Hong1
(1. 中国矿业大学 信电学院,徐州 221006;2. 徐州空军学院,徐州 221000)
为解决汽车发动机振动参数故障问题,采用自适应神经模糊推理系统(ANFIS)建立故障诊断模型,利用减法聚类方法确定模型初始结构,并采用云模型优化模型接口参数。实例建模对比分析,引入云模型后的ANFIS模型的识别率从88.75%提高到99.68%,训练误差也从0.12021降低至0.11526。试验表明引入云模型后该模型收敛速度快,拟合能力强且诊断识别精度高,能够有效识别汽车发动机振动参数的故障。
ANFIS模型;故障诊断;振动参数;云模型;
0 引言
汽车发动机是一个复杂的非线性系统。其故障的引发原因较多且难以诊断。发动机的振动参数异常是发动机常见的一种故障。若发动机的振动较大,不但乘坐不舒适,使驾驶员烦躁和疲劳,而且缩短零部件的使用寿命,甚至引起机械事故。因此如何建立良好的故障诊断数学模型来诊断汽车发动机的振动参数状况,对判断发动机工作是否正常,保证汽车运行的安全性和降低汽车发动机的维修费用都是有很大意义的。
近年来,人工神经网络和模糊理论在设备故障诊断中已得到广泛的应用。将模糊逻辑系统对先验知识的概括提取能力与神经网络对未知特性的学习归纳能力结合起来已成为现实。自适应神经模糊推理系统(ANFIS)是一种将模糊逻辑与神经元网络有机结合的新型模糊推理系统结构,它具有以任意精度逼近非线性函数的能力,泛化能力强和收敛速度快等特点。本文通过引入云模型,将ANFIS模型的输出结果进行连续化,并通过实例建模对比分析。本文建立一种基于ANFIS 的汽车发动机故障诊断模型,采用减法聚类方法自适应地确定模糊系统的初始结构和参数,避免了盲目性和随机性,同时将云模型引入模型接口,提高参数优化效率[3]。
1 故障诊断模型及分析方法
故障诊断模型的核心是故障诊断算法,对于神经网络诊断过程,可以简化为样本输入—节点输出,如图1 所示。为简化ANFIS模型并提高其学习速率和输出精度,将减法聚类方法应用于该模型的建立过程。ANFIS 诊断模型初始结构的确定涉及模糊规则提取、输入和输出空间的模糊划分,初始参数选取等诸多问题,初始结构的确定对模型的性能以及训练效率有很大的影响。目前,常用的聚类算法包括有最近邻聚类法、模糊C均值法等。这些算法通常需要预先确定聚类数;同时规则的提取没有考虑输入输出数据的相关特性,聚类的结果往往是仅对输入空间的聚类划分。减法聚类是一种高效的估计类别数目和聚类中心的方法[4],该算法是通过建立山峰函数这个数据密度指标,自适应地确定聚类数及类中心,聚类结果可以确定ANFIS 模型初始结构。
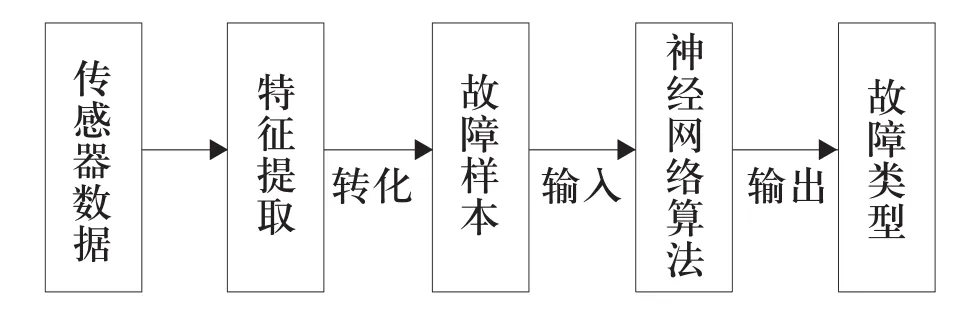
图1 诊断过程简图
1.1 减法聚类过程
考虑有一个n维空间的包含N个样本数据点的样本集:


图2 减法聚类过程
1.2 ANFIS
1985年Takagi和Sugeno提出了一种非线性T-S模糊模型,即后来的Sugeno模糊模型,是一种对有精确输入、输出数据集产生模糊规则推理的系统化方法。它结合模糊逻辑与神经网络二者之优势,改善了传统模糊控制设计中必须人为地不断调整隶属度函数以减小误差的不足,采用混合学习算法调整前提参数和结论参数,自动产生模糊规则。后来,Tang Roger提出与一阶Sugeno模糊模型功能等同的基于自适应神经网络的模糊推理系统(ANFIS )用来实现Sugeno模糊模型的学习过程。ANFIS可以认为是Sugeno型模糊模型的神经网络实现,该网络是一个多层前馈网络,结构如图3。

图3 ANFIS结构示意图
假定模糊规则库包含两种规则:

网络共有5层,各层功能如下:
第1层:Ai和Bi为输入变量的模糊子集,该层节点的激活函数代表模糊变量的隶属函数,该层的输出代表模糊化结果,即隶属度,其中一个节点的传递函数可以表示为
通常使用的激活函数为高斯型函数。
第2层:将模糊化得到的隶属度两两相乘,该层的输出代表着模糊规则的强度或适用度。

第3层:将各条规则的适用度归一化:

第4层:计算每条规则的结论:

第5层:计算所有规则的输出之和,即系统输出:
Piqiri为未知参数,通过算法训练ANFIS可以按指定的指标得到这些参数,从而达到模糊建模的目的。
1.3 参数优化
为提高学习的速度和质量,将模型参数分解为非线性前提参数和线性结论参数,并采用混合算法进行参数优化[5,6]。首先固定前提参数,采用线性最小二乘估计算法优化神经网络的结论参数。系统总输出可表示为结论参数的线性组合,即

1.4 云模型优化输出
云是用语言值描述的某个定性概念与其数值表示之间的不确定性转换模型,或者简单地说云模型是定性定量间转换的不确定性模型。它主要反映宇宙事物人类知识中概念的两种不确定性;模糊性(边界的亦此亦彼性)和随机性(发生的概率)。云模型把模糊性和随机性完全集成在一起,研究自然语言中的最基本的语言值(又称为原子)所蕴含的不确定性的普遍规律,使得有可能从语言值表达式的定性信息中获得定量的数据的范围和分布规律,也又可能把精确的数值有效转换为恰当的定性语言值。云模型实现的算法为:

其中,mean()、stdev()分别为求均值和标准差的函数。为提高学习的为提高学习的速度和质量,将模型参数适应云模型发生器。利用给定样本数据,输入模型并通过云发生器,直到满足误差指标要求或达到最大训练次数。
3 汽车发动机振动参数故障诊断实例
发动机由于各零部件的结构和运行速度不同,致使不同零部件的故障特征频率分布在机体振动信号的不同频带范围内。通常某一个或几个频带内信号能量的改变即可代表一种故障情况。因此,可提取包含待诊断部件故障信息的频带能量值作为故障诊断的特征参数。本文以康明斯6BT5.9型发动机振动参数为例,对该型号发动机在由机身处获得65组加速度信号作为训练样本和65组测试样本。
3.1 原始数据与测试数据

表1 训练数据

表2 测试数据
3.2 ANFIS故障诊断模型与识别
建立ANFIS 诊断模型如图4,隶属度函数均采用高斯型。为简化模型,采用减法聚类法对训练数据空间进行非线性划分,生成一个Sugeno 型作为初始模糊推理系统结构,并采用云模型来优化模型参数。具体诊断流程如图5。同时利用相同的样本数据集建立ANFIS模型,并对两种神经网络的拟合能力及收敛速度进行比较。对比结果如表3及图7 所示。

图4 ANFIS模型结构

图5 ANFIS故障诊断流程图
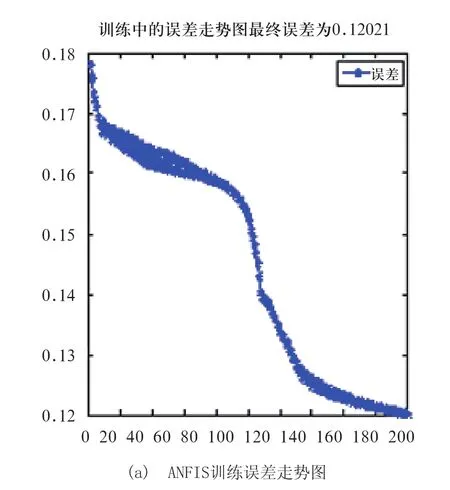
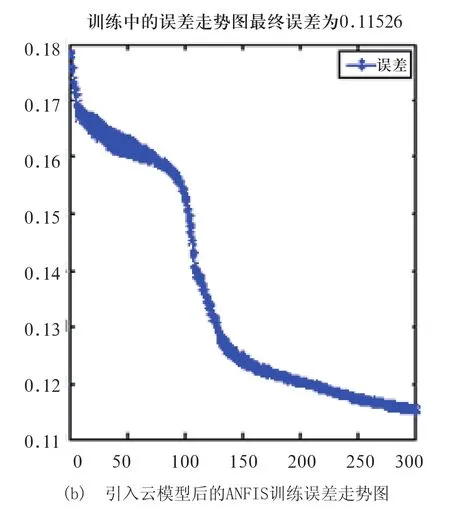
图6 两种神经网络的拟合能力及收敛速度误差图
通过对比可见引入云模型后的ANFIS 网络模型在训练速度、拟合能力以及收敛性方面均优于原始的ANFIS 网络模型。故障诊断的实际值与识别值的对比如图7、图8所示。

图7 传统的边界示意图

图8 经过云变换的边界示意图
3.3 模型结果对比分析
将传统的ANFIS与加入云模型的ANFIS结果对比如表3可以看出,加入云模型的ANFIS系统训练误差少,故障识别率高。
4 结论
本文在ANFIS模型的基础上引入云模型后,改进的ANFIS模型的识别率从88.75%提高到99.68%,而且训练误差也从0.12021降低至0.11526。表明了云模型的嵌入使得输出数据由离散型转化为连续型,可以提高原模型的识别精度和降低误差精度。云模型的加入,对于故障识别及相关领域的研究提供了新的思路。
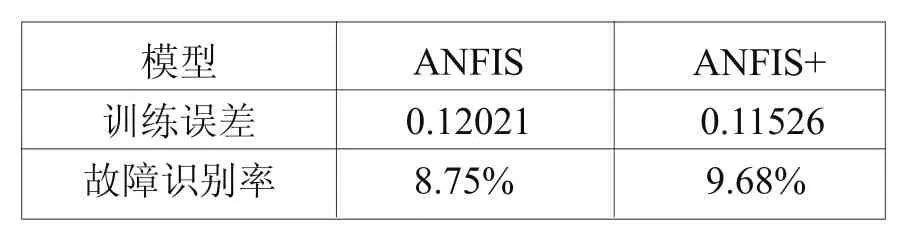
表3 传统的ANFIS与加入云模型的ANFIS结果对比
[1] 王新洲,史文中,王树良.模糊空间信息处理.[M]武汉:武汉大学出版社,2003.88-89.
[2] 施小成,谢睿,丁宗华.一种基于模糊神经网络的信息融合技术.[J]自动化技术与应用,2006,01.
[3] 祖家奎,戴冠中,张骏.基于聚类算法的神经模糊推理系统结构和参数的优化[J].系统仿真学报,2002,14(4):501-503.
[4] Yager R D Filev.Approximate clustering via the mountain method[J].IEEE Transactions on Systems,Man and Cybernetics (S0018-9472),1994,24(8):1279-1284.
[5] 梁华.基于神经网络及模糊理论的机械磨损故障诊断模型与策略研究[D].湖北:武汉汽车工业大学. 1995.
TP183
B
1009-0134(2010)10(上)-0020-03
10.3969/j.issn.1009-0134.2010.10(上).07
2009-10-14
孔莉芳(1972 -),女,江苏徐州人,在读博士,研究方向为模式识别、智能计算。
