基于相位补偿的BPSK相参脉冲串信号多普勒频率变化率估计算法
2010-03-27秦玉亮李彦鹏王宏强
李 宏 秦玉亮 李彦鹏 王宏强 黎 湘
(国防科技大学电子科学与工程学院 长沙 410073)
1 引言
雷达信号中的多普勒变化率反映了运动目标与观测平台之间的径向加速度信息,利用多普勒频率变化率信息可以对辐射源进行无源定位,其定位精度优于传统的测向定位方法[1]。在无源定位应用中,对多普勒频率变换率的估计精度要求很高,因此高精度的多普勒频率变化率估计是实现这类无源定位的关键技术。BPSK是一种常用的脉冲编码方式,其模糊函数呈图钉形,在脉冲多普勒雷达、地形跟随/防撞雷达、导航雷达及各类LPI/LPD雷达等雷达系统中有广泛应用。常用二相编码有Bark码、Bark衍生码、最小峰值旁瓣码等。
在短的观测时间内,目标与观测平台的径向加速度可视作不变,因此观测平台接收信号的多普勒频率变化率可视为恒定,通常情况下多普勒频率变化率很小,不超过100 Hz/s。文献[2]利用脉冲间的相参特性等效延长了信号观测时间,通过谱相关获得了单载频相参脉冲信号的多普勒频率变换率的估计,但该方法不适用于有脉冲内相位调制的信号。BPSK信号在脉冲内进行了相位调制,其频率变化率不等于多普勒频率变化率,直接估计其多普勒频率变化率难度大。若能去除相调制影响,将信号变成单载频信号,则可借鉴文献[2]的方法对多普勒频率变化率进行估计。基于这一思路,文献[3]采用平方倍频法将BPSK信号转化为单载频信号,但是平方倍频过程增加了噪声交叉项,信号的信噪比损失约6 dB,并且对等效载频估计精度要求更苛刻。文献[4]利用脉冲间相关运算消除脉内调制的影响,但基于脉冲间相关的估计算法的估计性能比基于平方倍频算法差[5]。
针对BPSK编码信号相位存在π跳变的特点,本文提出了一种基于信号相位信息的去BPSK调制方法,基于该方法的多普勒频率变化率估计算法与文献[3,4]中算法相比,在相同估计精度条件下所需信噪比门限更低。
2 信号模型[2−5]
在工程应用中一般将目标辐射源和观测平台的相对距离展开为时间的二次项,一次项表征目标相对于观测平台的径向速度,二次项表征相对径向加速度,在观测平台接收信号中分别体现为多普勒频率和多普勒频率变化率。观测平台在雷达一次扫描周期内接收到的信号时长很短,因此在一个扫描周期内,多普勒频率变化率近似为一常量[3]。
接收BPSK相参脉冲串信号可以表示为信号加噪声的形式:

式中υ(t) 表示复高斯白噪声。信号的中频形式为

式中fI为等效载频,为多普勒频率变化率,ϕ0为初相,Tp为第p个脉冲到达时间,φ(t)为BPSK调制相位,取值为0和π,rect(t/τ)表示时宽为τ的矩形函数。
对中频信号进行采样,设采样频率为fs。为分析方便,假设每个脉冲采样点数均为N,得到采样信号为

式中fp=FI+αKp,ϕp=ϕ0+2πFIKp+πα,FI=fI/fs,α=;Kp=fs⋅Tp且K1=0;υp(n)为零均值复高斯白噪声,方差为。
3 去BPSK调制原理
借鉴文献[6]中BPSK信号相位补偿的思想,构造新序列为

根据文献[7],信噪比较高时,加性噪声υp(n) e−j2πfn可等效为零均值实高斯相位噪声up(n)。因此,B(f, n)的相位测量值为

式中arg2π(x)表示取复变量x的相位,并且规范化到区间[−π, π),[x]2π∈[−π, π)。

对于BPSK脉冲压缩信号,相位调制序列{φ(n)}取离散值0和π,相位测量值arg2π[B(fp, n)]在初相ψ1=[ϕp]2π和ψ2=[ϕp+π]2π处呈高斯分布。若能够估计出初相ψ1或ψ2,则可以消除调制相位的影响。
3.1 初相估计算法
文献[6]提出利用统计直方图(Histogram)方法在[−π, π)范围内估计ψ1或ψ2,但是统计直方图的估计性能与数据量和区间大小有关,通常区间选择与数据密切相关,无有效的确定准则,参数估计性能不理想。
对于任意的ϕp,变量ψ1和ψ2必有一个在区间[−π/2,π/2)内。不失一般性,设ψ1∈[−π/2,π/2)。将式(6)表示的相位序列进行模π运算,并规范化到[−π/2,π/2):

可见,这一处理消除了BPSK相位调制序列{φ(n)}的影响。

3.2 去BPSK相位补偿
定义补偿算子为

式中ξp(f, n)等效为补偿误差。

式中第1项包含多普勒频率变化率信息,称之为信号项,第2项为噪声项依据大数定理εp()可等效为高斯噪声。式(11)中,若→fp,则Ξp()的信噪声比最大。
3.3 频率估计修正算法
由第3.2节的分析可知,提高BPSK脉冲等效载频fp的估计精度有利于提高式(11)的信噪比。对于BPSK信号,FFT频谱峰值频率不一定是载频频率[6]。文献[6]提出修正WPA(Weighted Phase Average)算法在信噪比较高时(信噪比门限约10 dB)可获得理想估计精度,但频率估计范围小。文献[8]提出的载频盲估计方法可克服文献[6]中频率估计范围小的缺陷(信噪比门限与文献[6]相同)。本文采用文献[8]的载频估计方法估计每个BPSK脉冲的等效载频,算法细节参见该文献。

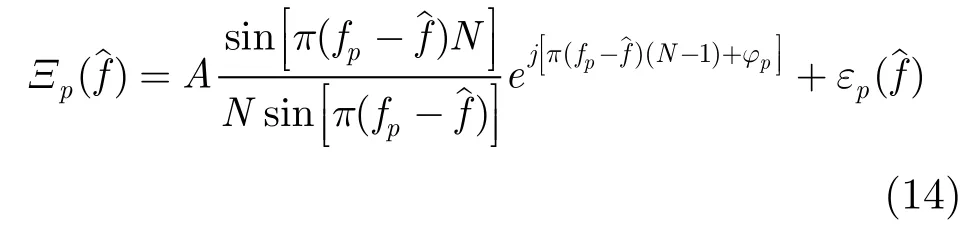
4 多普勒频率变化率估计算法
在高信噪比条件下,εp()可等效为实相位噪声,式(14)表示的新序列的相位测量值为
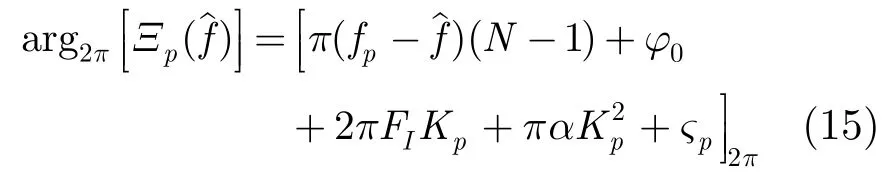
式中ςp为等效相位噪声。


如果脉冲重复频率固定不变,则ePRI(p)→0,根据文献[9],参数α的估计为

式中

若ePRI(p)→0,则必须消除2π(p)的影响。定义新相位序列如下:



式中A+表示矩阵A=C−1H的Moore-Penrose广义逆;y=C−1z,C为序列{νp}的协方差矩阵[3]:

5 仿真分析与讨论
为了检验本文所提多普勒频率变化率估计算法的性能,利用Matlab2008a对算法进行了Monte-Carlo仿真实验。仿真参数:中频频率fI=30 MHz,脉冲重复频率fprf=1 kHz,采样频率fs=100 MHz,脉冲宽度为τ=1.04 μs。
仿真实验1 不同信噪比下算法性能
BPSK编码序列分别采用13位Bark码序列和26位最小峰值旁瓣(MPS—Minimum Peak Side lobe)序列[10],编码序列见表1。多普勒频率变化率=62.5Hz/s,观测时间50 ms,信噪比从0 dB增加到30 dB,步进1 dB。每个信噪比下进行1000次Monte-Carlo仿真,仿真结果如图1所示。

图1 算法估计性能与信噪比及观测时长的关系

表1 二相编码序列
从图1(a)可以看出,本文算法信噪比门限约为6 dB,而文献[3]中基于平方倍频及文献[4]中基于脉冲间相关算法的信噪比门限分别为12 dB及10 dB。在信噪比高于12 dB时,本文算法与基于平方倍频的算法的RMSE性能相当,性能好于基于脉冲间相关的方法。从图中还可以看出,本文所提算法对不同编码序列都有很好的性能。图1(b)给出了算法估计精度与观测时长的关系,可以看出增加观测时长可大幅提高估计精度。
仿真实验2 多普勒频率变化率与采样频率、观测时间及脉冲重复频率约束关系
为验证本文3.3节多普勒频率变化率与采样频率、观测时间及脉冲重复频率约束关系的正确性,设多普勒频率变化率为100 kHz/s,观测时间为100 ms,其它参数设置同仿真实验1,容易验证条件式(13),式(17)仍然成立,仿真结果如图2。由图可见,对于不同的编码序列,在多普勒频率变化率为100 kHz/s时,算法估计与多普勒频率变化率为62.5 Hz/s时相差很小,验证了本文理论分析结果。
图2 不同多普勒频率变化率估计性能
仿真实验3 脉冲重复频率抖动的影响
图3给出了算法对随机重复频率抖动脉冲串信号的估计性能,重复频率在1%幅度范围内随机抖动,编码序列采用13位Bark码,观测时间为100 ms,其它参数设置同仿真实验1。由于重复频率抖动及初始载频估计精度的影响,在中低信噪比情况下(≤10 dB),无法消除式(20)中2π(FI−) ePRI(p)引起的相位模糊,导致算法性能退化。图中还给出了未经抖动处理算法的性能(重复频率取平均值),信噪比门限与抖动处理的算法相同,但估计RMSE性能下降,在12-15 dB时与文献[4]中基于脉冲间相关算法估计性能相当,但在更高信噪比时性能较其它方法差,但其优点是不需进行矩阵求逆等复杂运算,运算复杂度小。
图3 存在脉冲重复频率抖动时估计性能
6 结论
针对BPSK相参脉冲的特点,本文提出了一种新的基于相位补偿的高精度多普勒频率变化率估计算法,算法通过相位补偿去除BPSK调制引起的相邻采样点±π相位差跳变,使得多普勒频率变化率信息在频域得到了相参积累,进而利用二阶相位差分方法估计多普勒频率变化率。讨论了有无脉冲重复频率抖动两种情况下的多普勒频率变化率估计方法,给出了多普勒频率变化率与脉冲重复频率、采样频率及观测时间之间的约束关系。对于无脉冲重复频率抖动的情况,不需要进行矩阵求逆运算,运算复杂度大为减小;该处理方法对于脉冲重复频率抖动幅度小于1%时,仍能给出合理的估计精度。仿真结果表明,相比于已有算法[3,4]本文算法能够在更低信噪比下给出多普勒频率变化率的高精度估计值。
[1] 冯道旺. 利用径向加速度信息的单站无源定位技术研究[D].长沙: 国防科技学技术大学电子科学与工程学院, 2003.
[2] 冯道旺, 周一宇, 李宗华. 相参脉冲序列多普勒变化率的一种快速高精度测量方法[J]. 信号处理, 2004, 20(1): 40-43.Feng Dao-wang, Zhou Yi-yu, and Li Zong-hua. A fast and accurate estimator for Doppler rate-of-change with the coherent pulse train[J]. Signal Processing, 2004, 20(1): 40-43.
[3] 郁春来, 占荣辉, 万建伟. 一种BPSK相参脉冲信号多普勒频率变化率测量方法[J]. 国防科技大学学报, 2008, 30(1):53-56(82).Yu Chun-lai, Zhan Rong-hui, and Wan Jian-wei. A measurement algorithm for Doppler frequency rate-of-change with BPSK coherent pulse signal[J]. Journal of National University of Defense Technology, 2008, 30(1): 53-56(82).
[4] 郁春来, 万建伟, 占荣辉. 一种PCM相参脉冲序列多普勒频率变化率估计算法[J]. 电子与信息学报. 2008, 30(10):2303-2306.Yu Chun-lai, Wan Jian-wei, and Zhan Rong-hui. An estimation algorithm for Doppler frequency rate-of-change with PCM coherent pulse train[J]. Journal of Electronics &Information Technology, 2008, 30(10): 2303-2306.
[5] 郁春来. 利用空频域信息的单站无源定位与跟踪关键技术研究[D]. 长沙: 国防科技学技术大学电子科学与工程学院,2008.
[6] Nguyen V K. Frequency estimation of a radar pulse train with an unknown binary phase-coded sequence[C].Proceedings of the 2008 International Conference on Radar,Adelaide, Australia, 2008: 271-275.
[7] Tretter S A. Estimating the frequency of a noisy sinusoid by linear regression[J]. IEEE Transactions on Information Theory, 1985, 32(6): 832-835.
[8] 苑小华, 罗武忠, 罗来源. MPSK信号载波频率盲估计[J]. 电子与信息学报, 2008, 30(5): 1148-1150.Yuan Xiao-hua, Luo Wu-zhong, and Luo Lai-yuan. Blind carrier frequency estimation for MPSK Signal[J]. Journal of Electronics & Information Technology, 2008, 30(5):1148-1150.
[9] Händel P and Tichavský P. Frequency rate estimation at high SNR[J]. IEEE Transactions on Signal Processing, 1997, 45(8):2101-2105.
[10] Levanon N and Mozeson E. Radar Signals[M]. Hoboken, New Jersey: JOHN WILEY & SONS, INC., 2004: 106-109.
