掩模光刻机中找平控制研究
2010-03-23周庆奎刘玄博李霖
周庆奎,刘玄博,李霖
(中国电子科技集团公司第四十五研究所,北京 101601)
刻机总是不断的向着更高分辨率,更高的对准精度发展,从而减少单个电路器件的成本,提高生产效率。在掩模光刻机(Mask Aligner)的应用生产中,虽然其分辨率受到光刻胶、曝光量和曝光光源等各种工艺参数及工作环境的影响,但是掩模版平面与基片平面的平行是光刻机对准曝光的基础。随着掩模光刻机分辨率进入亚微米,为了保证基片上产品的合格率,光刻机的找平过程和结果就越发显得关键。
1 光刻机的找平结构
目前掩模光刻机中的找平(掩模版与基片楔形误差补偿)方法主要有两种,一种为掩模版(或找平版)和基片之间的一个相互适应找平,另一种为固定掩模版(或找平版),通过找平机构将基片与掩模版平面找平。找平机构的形式有两种:一种采用空气气浮轴承找平,即空气轴承在找平的过程中通过高压气体将气浮球碗吹离球座,使球碗在一定范围内可以自由运动,在掩模版架的自身重力作用下实现基片找平,见图1;

图1 气浮轴承找平机构
另一种为三点找平机构,目前我们所研制的多种型号光刻机均采用三点找平机构。三点找平机构采用弹性体作为找平补偿,通过弹性体的变形量大小来补偿基片与掩模版之间的距离差,从而使基片和掩模版找平。目前设备上使用的弹性体为弹性气囊,其特点是可以通过气囊气压将三点的压力相互传递,使掩模版和基片找平时在平面间得到一个均匀的找平压力,见图2。

图2 三点找平机构
2 找平
采用高灵敏度接近式传感器检测找平过程中弹性体的变形量,在承片台下表面均匀分布3个接近传感器。在z向驱动电机向上抬升的过程中,使基片和掩模版慢慢接触,通过找平补偿顶柱将基片平面高端的量传递到弹性体作为弹性体向下的变形量,当3个接近传感器都检测到承片台向下微小移动时,可以判断基片平面和掩模版平面开始找平。采用OMRON磁性检测接近传感器,其重复精度达到2μm。在传感器有动作时候往往找平只是刚刚开始,基片和掩模版之间接触的比较虚,基片和掩模版之间没有达到期望的接触压力,需要对找平压力做进一步的控制。弹性体内部充满一定压力的大气,使弹性体对3个找平顶柱的推力是相等的,从而保证了基片平面和掩模版平面之间的压力均匀性。
3 找平压力控制
传统的找平压力控制采用控制弹性体的变形量来间接地控制找平压力,在气浮轴承找平机构中通过控制第三方的接触压力来间接控制找平压力。通过间接的方式对找平压力的控制很难做到一个精确的控制。找平压力是掩模光刻机的一个重要的参数,过大的找平压力会使得掩模版和基片的变形量过大,在分离对准时会将这个变形量释放,严重影响光刻机的性能和可操作性,太小的找平压力会使基片和掩模版之间因自身平面度的问题导致局部没有接触,找平结果不理想,影响基片图像的一致性。基于对找平压力的直接精确控制,系统采用高精度的测力传感器对找平压力进行检测,通过控制电机的推力实现对找平压力的控制和调节,满足硬接触、软接触等不同接触模式对找平压力的要求。
3.1 找平压力检测
采用FS型触力传感器(见图3)对找平压力进行检测。在承片台的下表面均匀分布3个FS触力传感器,在z向电机抬升过程中,触力传感器会检测到基片和掩模版之间的接触压力的变化,并将接触压力转换为相应的电压信号传给上位机。

图3 FS型触力传感器
FS型触力传感器测量压力精度高,达到0.01N,不足之处输出电压会受到电源电压波动的影响,需对它采用稳压电路供电,见图4。

图4 FS型触力传感器电压输出
3.2 电机及控制器
光刻机在基片Z向运动过程中要控制基片与掩模版的找平接触压力,在Z向运动和锁紧后分离时还需要进行位置和速度控制,因此,在设备中采用FAUHBER公司的直流伺服电机和控制驱动器BLD7010,可以通过上位机对电机控制驱动器的设定可以实现电机在多种工作模式下的切换,满足电机在不同的阶段对控制的要求。电机在抬升或下降的过程中工作在速度模式下;在检测到找平信号后进行找平压力控制时,电机切换到推力控制模式;在找平后的掩模版与基片的分离过程中实现精确位置控制。控制驱动器与电机接线见图5。

图5 电机驱动器接线
3.3 找平压力控制
通过控制伺服驱动器的模拟电压信号输入来控制电机的电流,控制电机找平时的推力。上位机通过比较给定值和测力传感器反馈值,给出控制电机推力的电压值,通过控制器内部的压力调节器(APR)、电流调节器(ACR)完成对电机的推力控制。找平压力控制原理图如图6所示。
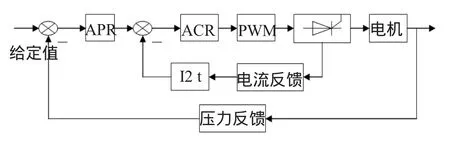
图6 找平压力控制原理图
3.4 找平压力控制的实现
找平压力控制的实现主要由硬件的电路基础和上位机的软件控制实现,主要的硬件有上位机的测力传感器采集电路、电压输出电路、电机及驱动控制器等。软件的控制实现主要有对电机模式的切换,电机的运动控制,通过检测压力反馈值确定压力控制输出的控制电压等。系统主程序采用Visual c++实现。找平过程控制流程图如图7所示。

图7 找平过程控制流程图
在实际的操作过程中,只要通过对操作界面上的找平压力设置参数来改变找平压力,还可以将找平过程中的压力显示在操作界面上实时监控。
4 结论
通过对找平过程中的接触压力的直接测量可以准确得到找平过程中的找平压力值,并将测量的接触压力值反馈给上位机实时的调整电机的推力,通过这一反馈可以精确地控制找平压力,在控制基片与掩模版的变形量和找平压力不足两方面都有了很大的提高。在设置好找平压力参数后,找平过程通过软件完成,找平过程一致性好,压力控制稳定,提高了基片上整体图形的一致性。
