广州地铁3号线自动化仓库
2010-03-16杨登峰
杨登峰
(广州市地下铁道总公司运营总部,510310,广州∥助理工程师)
广州地铁3号线自动化仓库
杨登峰
(广州市地下铁道总公司运营总部,510310,广州∥助理工程师)
自动化仓库由监控系统、堆垛机及输送机三大系统所组成;系统之间又通过Profibus(现场总线)进行连接,以实现信息传输,自动作业。广州地铁3号线夏窖车辆段材料总库是国内地铁首次采用此类设备的自动化立体仓库。与传统仓库相比,自动化仓库能够极大地提高工作效率,迅速地提取各类维修备品备件及物资,能够更好地服务于运营维护,同时还具有空间利用率高、节省人力等优点。
自动化仓库;监控系统;堆垛机;输送机;可编程序控制器控制
Author's addressGuangzhou Metro Corporation,510310,Guangzhou,China
自动化仓库由监控系统、堆垛机以及输送机三大系统所组成;系统之间又是通过Profibus现场总线进行连接,以实现信息传输,自动作业。
1 监控系统
自动化仓库的后台监控调度系统是采用德国SIEMENS公司的工业控制软件WINCC 6.0作为开发工具来开发的。它是整个立体仓库的信息枢纽,是实现控制系统的重要组成部分。监控调度系统一方面负责采集和监控现场数据,以清晰和准确的画面以及文字信息来描述现场设备——堆垛机、输送机的各个工位状态和其他的各种信息,给操作人员良好的人机界面;另一方面,他依据采集到的现场数据并结合管理系统的作业命令,按照运行时间最短、作业之间的合理配合,对作业的先后顺序进行优化,并将其下发给输送机和堆垛机。监控系统会显示堆垛机的运行信息,如图1。

图1 监控系统显示的堆垛机运行信息
2 堆垛机系统
堆垛机系统以SIEMENS S7-200可编程控制器(PLC)为中心,通过采集外部端子信号,并结合分析来自于上位机或操作员面板的预期目标地址和相关其他作业信息,驱动升降或水平变频器作相应的运行,达到自动出入的目的。其电气装置包括以电气柜为主的内部装置和电气柜以外的外部装置。内部装置是堆垛机控制的核心部分,它包括可编程序控制器、变频调速器、接触器、继电器等组成的控制回路和状态显示回路,其主要功能是使堆垛机正常工作,执行操作人员的操作指令并返回相应的显示信号。外部装置主要是电力输送、信号传递、安全保护和堆垛机尺寸检测等。操作者可以通过堆垛机的水平动画了解运行状态,如图2。
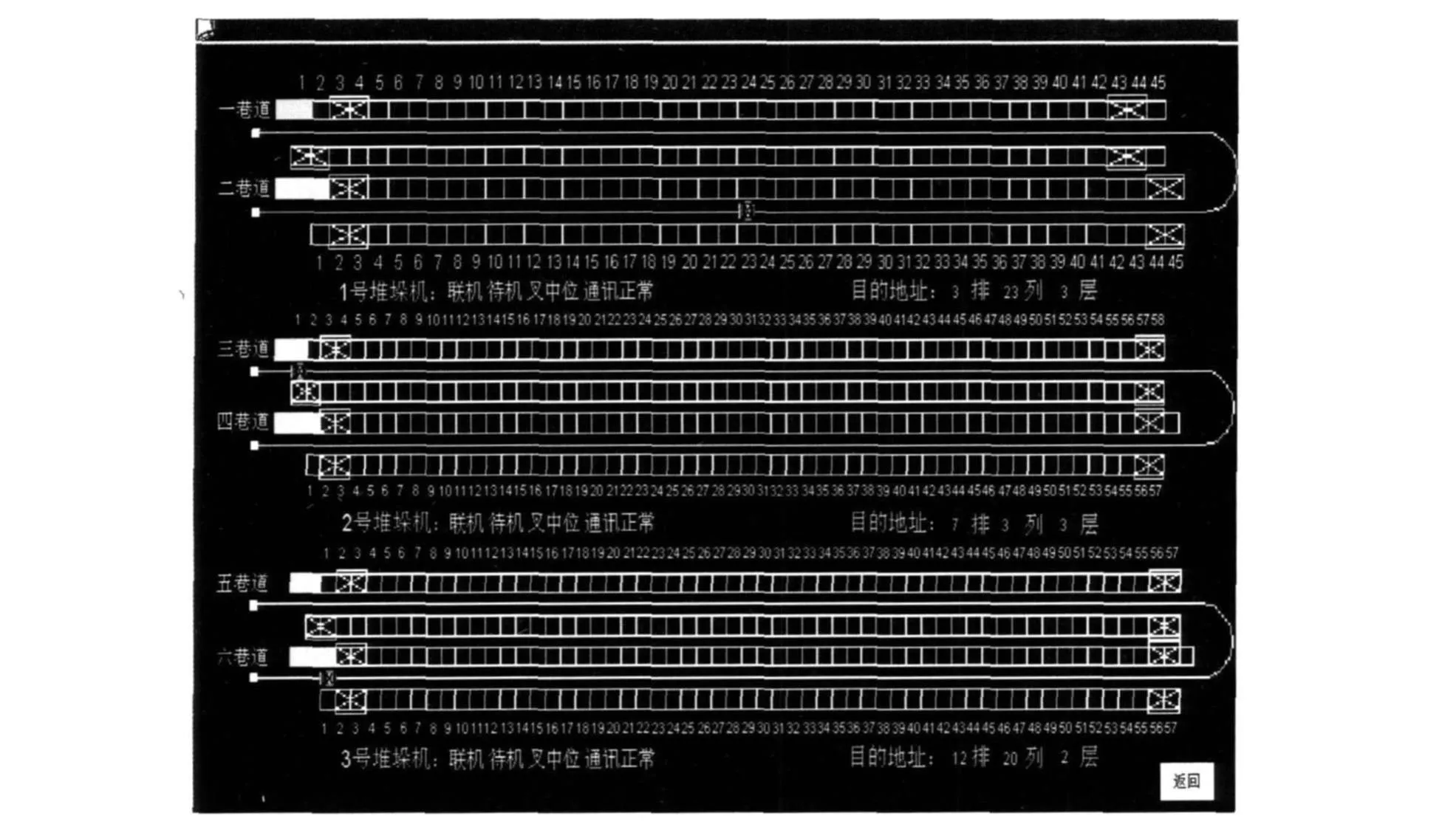
图2 堆垛机水平动画
3 输送机系统
输送机控制系统由SIEMENS S7-300 PLC控制系统、TP触摸屏操作界面、组态王组态控制系统、位置或状态信号检测系统、电气控制柜、供电系统等组成。由于在每段输送机上装有红外光电开关,当货物被传送到输送机上,通过红外光电开关,系统能自动控制输送机的行走与到位停止,并将信号送给可编程序控制器。每一个升降台上安装有检测其高低位的接近开关,用来控制升降台的起升与下降。在输送机入口处,安装了外形尺寸检测光电开关,用来检测货物是否超尺。若货物超尺,托盘将被送到整理区去;若不超尺,就入库。在输送机出口处安装有按钮,用于出库分拣完成后可以回库的反馈信号,还配有LED(发光二极管)电子显示屏提示该出口的分拣信息。
输送机的系统运行画面如图3。
4 仓库系统中的PLC控制以及信号传输
在自动化仓库中,堆垛机系统和输送机这两个系统是由PLC来实现控制的。
堆垛机控制系统与变频器连接如图4所示。
另外一套输送机系统的控制部分由SIEMENS S7-300 PLC的各功能模块(中央处理CPU模块、存储模块、通信模块、数字输入或输出模块)组合而成。在电气控制柜下面设两排接线端子,引进系统外部位置或状态检测信号,并为TP数字触摸终端(屏)、固定条码读码器和红外光通信器以及各交流变频调速器速度给定的中间继电器等提供工作电源。
在整个自动化仓库系统中,输送机是作为一个信息交换的主战,而3台堆垛机则通过Profibus现场总线来实现与它的连接。连接模式如图5。
下面以堆垛机的伸叉取货为例,介绍系统的工作原理,同时对堆垛机伸叉时对位不准的故障进行PLC控制程序方面的分析。
如图6所示,驱动堆垛机行走电机M1和驱动货叉伸缩取卸托盘的货叉电机M3都由同一个变频器BPQI供电,转速和转向则由PLC通过变频器控制。M1和M2分别由接触器1C和3C控制,1C和3C通过其常闭触点实现电气互锁 。
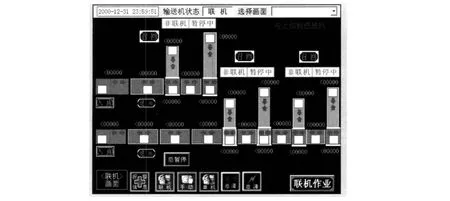
图3 输送机的系统运行画面

图4 堆垛机控制系统与变频器连接示意图
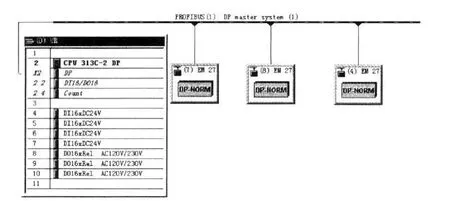
图5 堆垛机与Profibus现场总线的连接示意图
正常运行顺序为:堆垛机由M1驱动行走至目标位置,得运行对准信号后,由PLC控制变频器停止输出,让接触器1C复位,这时停止在运行对准位置上。约3 s后,执行货叉伸出取卸托盘货物的动作。即让接触器3C吸合,变频器输出合适转速转向的电源,驱动M3电机执行伸叉取卸货的动作。
若接触器1C复位不良,延时超过 3 s后才复位,那么执行货叉伸出取卸托盘货物的动作时,变频器输出的电就会被误送到驱动堆垛机行走的电机M1,使堆垛机重新行走,偏离已运行对准的目标位置。接触器1C复位后,接触器3C吸合,驱动M3电机执行伸叉取卸货的动作,结果货叉伸出的位置不对,甚至回造成碰撞等严重后果。
下面以2007年一次对位不准故障为例,分析堆垛机对位不准时,货叉为何还能执行伸叉取卸货的动作。
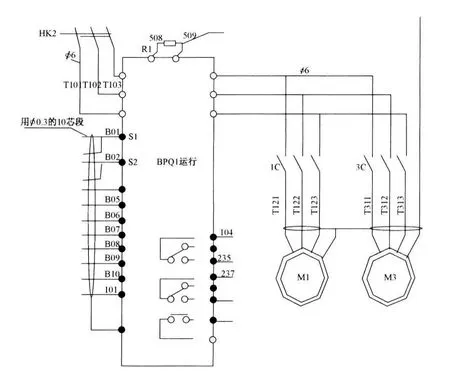
图6 变频器BPQ1与电机连接电路图
相关语句表如下:

SUBROUTINEBLOCK取货:SBR0 Network 3 Netw ork 4 LD 左中位 LDN 去入出口A 右中位 AN 货叉向左AN 叉在端位 AN 出左AN 左伸 AN 右端位
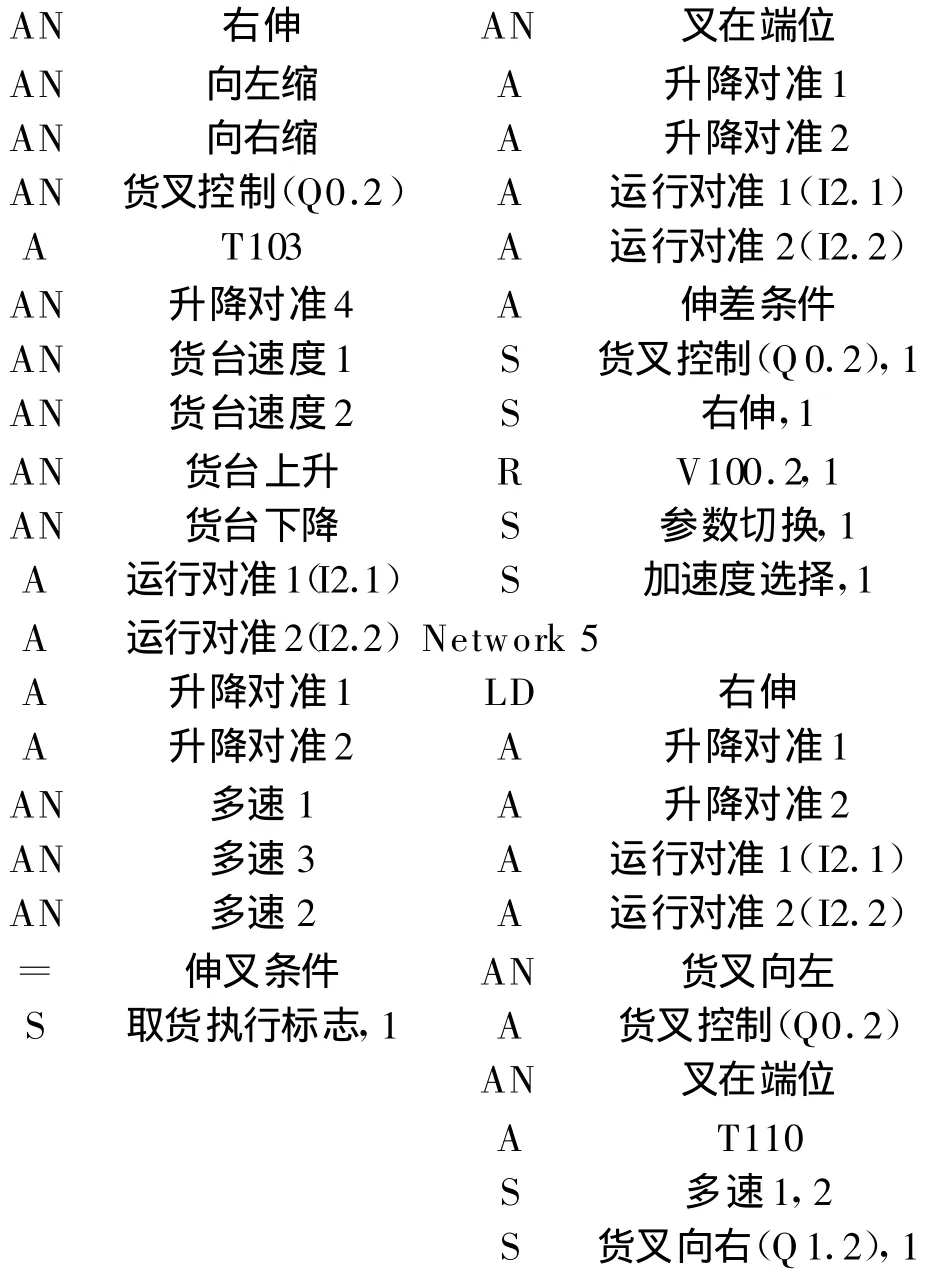
AN 右伸 AN 叉在端位AN 向左缩 A 升降对准1 AN 向右缩 A 升降对准2 AN 货叉控制(Q0.2) A 运行对准1(I2.1)A T103 A 运行对准2(I2.2)AN 升降对准4 A 伸差条件AN 货台速度1 S 货叉控制(Q0.2),1 AN 货台速度2 S 右伸,1 AN 货台上升 R V100.2,1 AN 货台下降 S 参数切换,1 A 运行对准1(I2.1) S 加速度选择,1 A 运行对准2(I2.2)Network 5 A 升降对准1 LD 右伸A 升降对准2 A 升降对准1 AN 多速1 A 升降对准2 AN 多速3 A 运行对准1(I2.1)AN 多速2 A 运行对准2(I2.2)= 伸叉条件 AN 货叉向左S 取货执行标志,1 A 货叉控制(Q0.2)AN 叉在端位A T110 S 多速1,2 S 货叉向右(Q1.2),1
从语句表Network 3知,当堆垛机行走对准目标时,运行对准1(I2.1)、运行对准2(I2.2)输入有效,变量“伸叉条件”才可能有效,因为用的是“=”即out指令。反之,当堆垛机行走偏离目标时,运行对准1(I2.1)、运行对准2(I2.2)输入无效,变量“伸叉条件”不可能有效。
从语句表Network 4~5知,虽然运行对准1(I2.1)、运行对准2(I2.2)和变量“伸差条件”都必须满足有效,货叉控制(Q0.2)和货叉向右(Q1.2)才有可能被置位输出。但由于用的是“S”置位指令,即堆垛机行走对准目标,使运行对准1(I2.1)、运行对准2(I2.2)和变量“伸差条件”都满足有效,其它条件也具备,货叉控制(Q0.1)和货叉向右(Q0.2)被置位输出。假设某原因使堆垛机行走偏离目标,运行对准1(I2.1)或运行对准2(I2.2)无效,货叉控制(Q0.1)和货叉向右(Q0.2)不会因此而复位不输出,而要等到控制它们的“R”复位指令它们才复位停止输出。而原来整个程序的货叉控制(Q0.1)和货叉向右(Q0.2)的“R”复位指令都与运行对准1(I2.1)或运行对准2(I2.2)无关 。因此,货叉控制(Q0.1)和货叉向右(Q0.2)置位输出不会因运行对准1(I2.1)或运行对准2(I2.2)变成不再被满足有效而复位不输出。
具体到本故障,当堆垛机行走对准目标时,运行对准1(I2.1)、运行对准2(I2.2)输入有效,让货叉控制(Q0.1)和货叉向右(Q0.2)被置位输出。但由于接触器1C因粘连而没有复位,变频器输出的电能就通过接触器1C驱动行走电机M1,使堆垛机行走偏离目标位置,这时虽运行对准1(I2.1)或运行对准 2(I2.2)输入无效,但货叉控制(Q0.1)和货叉向右(Q0.2)不会因此被复位而停止输出。直到接触器1C复位,接触器3C吸合,货叉伸出,因位置不对撞到物体造成电流增大,最后触发过载保护而停机。
针对原程序有这种潜在的弊端,一方面对程序作了修改,使系统只要有其中一个运行对准检测开关没对准,马上让驱动货叉伸出的指令复位。也就是在PLC主程序模块的Network 93加入以下指令:

另一方面更换了接触器,从硬件上消除粘连停滞的隐患,从而使系统达到安全运行的目的 。
5 结语
整套设备采用国外先进技术和多次投入使用的成熟软件,提高了系统的可靠性,保证物流的通畅性,使运输快速平稳。广州地铁3号线在使用以及维护这套设备的过程中,对其进行了深入的研究,使整个系统的控制模式在自动控制的应用实例中也属经典,很有学习和研究价值。
Automated Warehouse of Guangzhou Metro Line 3
Yang Dengfeng
The automated warehouse designed and manufactured by Beijing Gaoko Storage Equipment Research Institute came intoservice for Guangzhou Metro Line 3 depot at the end of 2006,it is the first time that such equipment is applied to metro in China.Compared with the traditional warehouse,automated warehouse can greatly improve the work efficiency,extract rapidly various forms of maintenance spare parts and materials,and serve the operation and maintenance better.At the same time,automated warehouse has advantages in higher utilization rate of space and less waste of labors.
automated warehouse;supervisory system;stacker;conveyor;control of programmable logic controller
U 231+.92
2009-12-23)