补偿装置在高速磁浮系统中的应用研究
2010-03-16唐连福
唐连福
(上海磁浮交通发展有限公司,201204,上海∥工程师)
补偿装置在高速磁浮系统中的应用研究
唐连福
(上海磁浮交通发展有限公司,201204,上海∥工程师)
由于高速磁浮牵引采用大功率变流装置,供电系统必须对系统运行时的谐波进行滤波,对无功分量进行调节。系统运行时对电网的无功和谐波进行补偿与滤波是电网安全和系统正常运行的重要部分。分析了补偿系统的构建和控制原理。使用IGBT(绝缘栅双极型晶体管)无功调节装置将有利于补偿系统满足牵引系统补偿的快速性要求。该补偿系统运行后能够满足电网质量要求,但系统损耗和动态响应尚需进一步优化。
磁浮;滤波;动态补偿;控制
Author's addressShanghai Maglev Transportation Development Co.,Ltd.,201204,Shanghai,China
目前世界上高速磁浮有常导磁浮交通和超导磁浮交通两种技术。常导高速磁浮系统以常导电磁浮、长定子直线同步电机驱动,列车最高运行速度不低于200 km/h,主要包括磁浮线路、磁浮列车、牵引供电、运行控制以及车站和维护设施等子系统。
高速磁浮交通的牵引驱动采用的大功率高电压变流装置受控于输出电源,系统运行时对电网的无功和谐波进行补偿与滤波是电网安全运行和系统正常运行的重要部分。本文对此系统中的无功补偿系统进行研究。
1 牵引系统特点及对供电系统的要求
磁浮列车的驱动由布置在分区端部的多套控制器和高中功率变流装置组成。变流装置根据指定的速度曲线和列车的实际位置输出幅值、频率,以及相位受控的电压、电流,并通过变压器、馈电电缆、线路旁的开关分段,为磁浮列车所在的长定子段(轨道梁上安装的长定子线圈和车厢底部排列的直流励磁绕组构成直线同步电机)供电,实现列车的起动、加减速、定速和停车驱动,保证列车按照指定的速度曲线进行运行。
为磁浮列车提供驱动电源的变流装置一般为交-直-交形式,整流部分为双三相12脉波半控桥。因此在磁浮列车项目中,其运行系统必将需要大量的无功并产生大量谐波。供电系统如果不加处理,一方面需要在设计时加大对电网的容量需求,另一方面会由于磁浮运行时产生的谐波和大量的无功功率而导致电网品质系数降低,以及电网电压的波动严重超标。因此系统中必须考虑配置大容量滤波和动态无功补偿系统,而且牵引系统的快速调节特性决定了动态补偿系统必须具有快速的响应。
2 补偿与滤波系统的设计
2.1 母线单线图
为安全可靠的运行,高速磁浮系统可采用双回路供电系统。其母线带载单线图如图1。
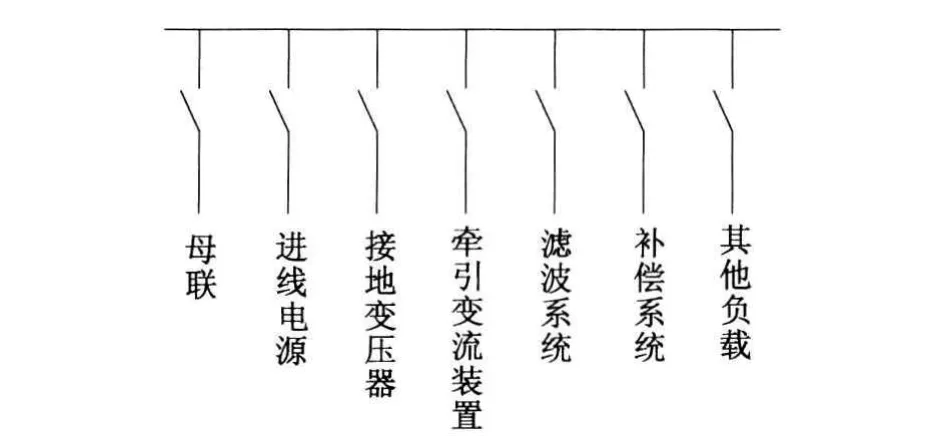
图1 20kV单线图
图1中牵引变流装置为主要负载,所占负载比重很大。谐波和动态补偿系统就是为满足牵引变流装置的工作特性而设置的。谐波和动态补偿系统必须能满足牵引列车时牵引变流装置所产生的谐波和无功压降。
2.2 设计思想
根据变频器带车运行时的负载特性和上述电网数据计算,考虑当前补偿装置的技术水平和今后运行的经济要求,采用滤波系统和动态补偿系统相结合并采用变频设计的LC电路进行谐波滤波;动态补偿容量连续调节、动态补偿装置可采用基于IGBT器件的变频器来快速实现调节的方案。
1)滤波装置首先根据磁浮牵引变流装置的运行状态决定其工作状态,并与动态补偿相结合。
2)谐波滤波波次和分量分别为:5次滤波补偿量+1 Mvar;7次滤波补偿量+1 Mvar;11次滤波及高通补偿量+4 Mvar。
3)系统动态根据母线电网的负载进行母线侧无功功率因素的控制。
4)动态补偿由600 V等级(20 kV/600 V的变压器)的10套容量为-600 kvar~+600 kvar的IGBT变频器实现0~12 Mvar可调节容量。
3 滤波与动态补偿系统
3.1 系统构成
由以上分析可知,谐波和补偿系统设计成如图2所示形式。
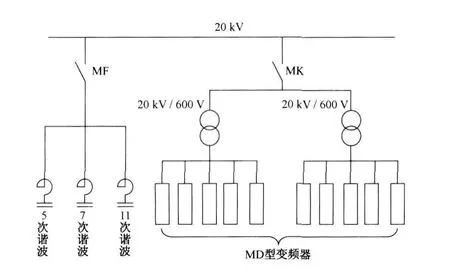
图2 滤波和动态补偿系统配置图
其中谐波滤波次数为:5次、7次、11次和高通。每组滤波装置配置静态补偿容量分别为1 Mvar、1 Mvar、4 Mvar。系统投运工作后,MF开关自动合闸,跟随20 kV母线上的牵引变流装置工作状态:牵引变流装置启动时,MF同步合闸;牵引变流装置停止工作一定时间后,MF分闸。
动态补偿系统由MK开关、变压器2台、600 V变频器(600 kvar/台)10套组成动态补偿装置。
3.2 控制原理
磁浮列车起动时,母线侧随着变流装置的输出电压、电流和频率等变化,产生谐波和电压电流的相位偏差,系统的谐波量和功率因数发生了变化;动态补偿系统的控制器根据检测到的电压、电流进行转换计算得到系统的无功功率;把该数据与控制的设定值进行比较,送到控制系统的给定发生器进行PI(比例积分)调节,构成调节系统的主环。由于调节装置采用IGBT变频器,低压侧的动态响应时间提高,母线侧的功率因数会在一个较小的允许的波动范围内进行调节。
3.3 动态补偿系统的调节控制框图
根据上述原理设计动态补偿系统总调节框图如图3。其中输入为母线侧的电流电压检测量。令∑Q与0相比,通过运算输出调节指令直流侧电压给定Udset和母线侧电流给定Ilset以总线方式发送给图2中的IGBT变频器组;各变频器控制器根据收到的调节指令控制IGBT的PWM(脉宽调制)信号实现系统无功功率的动态调节。
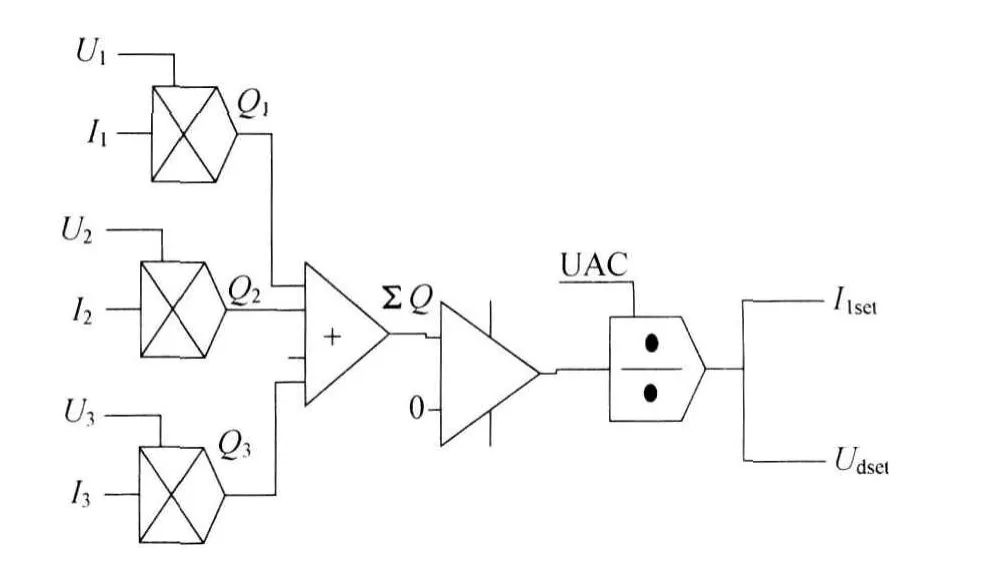
图3 控制系统调节框图
3.4 系统测试
系统测试获得相关参量的运行曲线如图4所示。
图中各曲线依次(从上到下)为:
曲线①——系统对各补偿变频器的DC_LINK电压给定值;
曲线②——各补偿变频器的DC_LINK电压实际值;
曲线③——供电系统20 kV母线的电压;
曲线④——供电系统20 kV母线的功率因数。
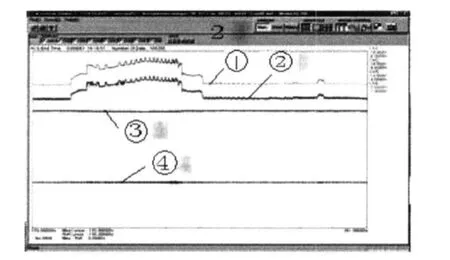
图4 磁浮车一次循环运行时的补偿系统曲线
由此可见:
1)在磁浮列车一列车运行的情况下,调节系统能够满足工况的要求,实现磁浮列车运行时的谐波滤波和功率补偿的作用;功率因数基本上维持在0.90~0.99间,20 kV母线侧的电压波动很小;系统的母线侧响应滞后接近50 ms左右,低压侧的控制响应滞后约为10~15 ms左右。
2)由于磁浮列车运行存在间隔,动补装置须补偿谐波装置的静态无功量,补偿系统在列车不运行时损耗过高。为减小系统损耗,在列车停运后,切断谐波滤波装置的母线侧开关。
4 结语
综上所述,滤波系统的静态补偿容量在磁浮列车运行间隔时需要动态补偿系统进行负补偿,导致动态补偿系统的损耗过大,增加了运行成本。系统投资时的费用节省远小于实际运行中长期产生的运行费用,降低了系统的经济性能。设计的动态补偿器在AC 600 V低压侧的响应较快,但母线侧的响应时间则相对滞后,影响了IGBT开关器件的快速性能在整个补偿系统中应有的优势。因此,从经济性和技术性上考虑,此补偿系统存在进一步优化的必要。
[1]吴祥明.磁浮列车[M].上海:上海科技出版社,2003.
[2]吕千云,程浩忠,何维国,等.高速磁悬浮列车系统的谐波分析[J].华东电力,2004,32(8):46.
[3]闫功胜.高速磁浮交通系统谐波抑制及无功补偿措施[J].城市轨道交通研究,2008(8):59.
Application of Compensation System in High-speed Maglev Trans Rapid
Tang Lianfu
The harmonic of the power supply system must be filtered and the reactive power must be regulated,which are caused by the high-power propulsion converters applied in high-speed Maglev Trans Rapid.The structure and control fundamentals of the compensation system are analysed and described,which should match the requirements rapidly by using IGBT inverter.This filter and dynamic compensation system will have a better effect in Maglev Trans Rapid,at the same time,the system waste and dynamic response shall be improved.
maglev;filter;dynamic compensation;control
U 237+.8
2009-03-26)