某自行高炮全炮位移三分向测试系统设计
2010-02-26唐莞洋
唐莞洋
(中北大学 光电仪器厂,山西太原030051)
经典的自行高炮射击理论,很难精确预测其发射时的运动和受力变化规律,根本原因在于该理论是建立在刚性、平面、静止平衡等基本假设条件基础上的[1]。相当于认为高炮所有零部件和土壤都是刚性体,发射过程中高炮所有的运动和受力,均位于一个对称平面内,既没有平面方向的平动,也没有空间方向的跳动,剩下的只是炮的身管后坐部分相对于摇架沿炮膛轴线方向,作往复直线的后坐和复进运动。根据以上假设所建立起的发射时的动力有效模型,并用于求解高炮的运动位移,试验结果和实测结果差距较大[2~3]。由于高炮各零件本身、零部件的弹性变形和地面的弹塑性,在主动力炮膛合力、弹丸回转力矩和全炮重力的共同作用下,车载自行高炮会沿三个坐标轴方向直线位移。
在炮射试验中,我国研制的自行高炮的首发命中率是非常高的,要想根据首发炮弹的弹着点,修正自行高炮方向,从而提高次发命中率,也需要研究其首发后的位移方向,以寻找合适的时机发射次发炮弹,提高次发命中率[4]。因此,获得自行高炮主要零部件的位移运动规律,为炮的动态设计提供有力的理论事实依据,意义非常重大。
1 系统的总体设计
鉴于自行高炮位移变化的复杂性,设计方案采用三分向的测试方法。系统原理框图如图1所示。位移传感器信号输入记录设备内部,通过内部信号调理电路、C8051F自带A/D转换电路转换为数字信号,经硬件FIFO缓冲后,进行实时采集和存储记录[5];上电后,记录设备首先进行系统初始化工作,初始化完成后,判断内部数据存储器是否有数据。有数据,则进入读数和设置状态;无数据,则立即进入数据采集记录状态,记录时间可以自行控制;重新上电后,进入读数和设置状态,对记录仪内部存储器的数据进行读取和分析。

图1 系统结构框图
2 硬件电路设计
系统的硬件电路,主要包括位移传感器,供电电路,信号调理电路,采集电路和记录体组成。位移传感器将被测物体位移变化,转变为直流标准信号,供电电路为整个系统提供供电,信号调理电路将标准电压信号调整在C8051F单片机的参考电压之内,AD转换后经FIFO缓冲,保存在记录体内部,通过上位机将数据显示在PC机上,绘制数据波形,直观显示自行高炮在发射炮弹时位移情况。
3.1 位移传感器
选用GD19系列通用型直流LVDT位移传感器,该传感器外径为Φ19 mm;内置放大器的一体化结构,抗干扰能力强;无滑动触点,可靠性高,使用寿命长;分辨率高,响应频率高,重复性好。
LVDT(Linear.Variable.Differential.Transformer)是线性可变差动变压器的缩写,它由一个初级线圈、两个次级线圈、铁芯等部件组成。通过初级线圈与初级线圈电磁耦合,使得铁芯的位置变化量与次级两个线圈输出电压之差呈线性关系。这一原理被广泛应用于测量预先被转换成直线位移的各种物理量,如拉伸、膨胀、直径、差压、力等,具有无滑动触点、功耗低、分辨率高、使用寿命长、可以在高温、高湿、粉尘等恶劣工况下使用等特点。
GD19系列产品采用了国外同类产品的先进生产工艺,将信号放大电路内置于传统的LVDT当中,这种一体化的预校准型产品,让用户安装使用更加简单、便捷,输出的标准电压信号更适合与通用型数字显示表连接,直接观察。
由于自行自行高炮炮膛与炮体的刚性连接,炮体的位移变化能反映全炮的位移变化。所以为了真实的反应自行高炮的位移变化,分别在炮体的三个方向安装位移传感器。
3.2 供电电路
为了增大产品的使用范围,系统采用自带电源供电。供电电路如图2所示。

图2 系统供电电路
网标VCC连接电池,电池选用两节3.7 V供电的锂电池。供电电路通过场效应管控制供电的通断:合上开关前,U3的3脚和4脚的电压相等,等于电池电压,U3不导通,系统没有电;合上开关后,U3的2脚电压高于1脚电压,则1脚与7、8脚导通,则4脚接地。此时3脚电压高于4脚,则3脚与5、6脚导通,电池电压通过场效应管。通过C14、C15滤波,电池电压经S818转换为3.3 V,为记录系统供电。
3.3 数据采集电路
数据采集电路由信号调理电路、单片机和存储单元组成。信号调理电路将位移传感器输出的标准电压信号,调理到C8051F单片机参考电压范围之内,单片机采集调理后的电压信号并保存至存储单元。
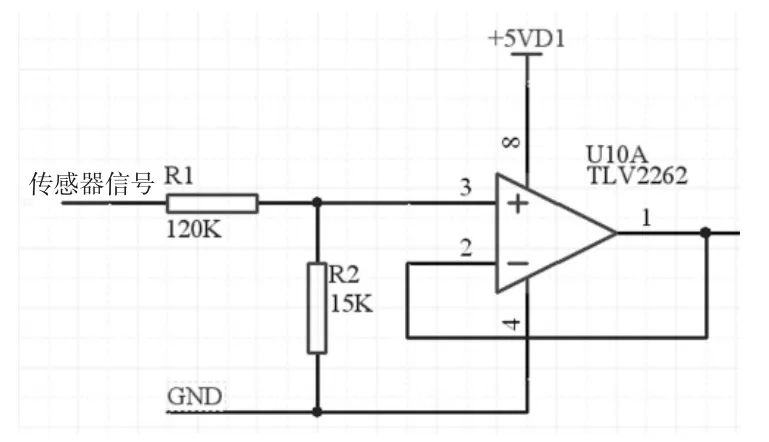
图3 信号调理电路
(1)信号调理电路。信号调理电路如图3所示。系统选用的运算放大器为电源供电的TLV2262。传感器信号通过分压电阻分压后,通过运算放大器U10电压跟随,增大其驱动能力,送至C8051F310单片机。
(2)C8051F单片机。C8051F系列单片机是完全集成的混合信号系统级芯片(SOC)[6],具有与MCS-51指令集完全兼容的全新CIP-51内核。它在一个芯片内集成了构成一个单片机数据采集或控制系统所需要的几乎所有模拟和数字外设及其他功能部件。这些外设或功能部件包括:ADC、DAC、可编程增益放大器、电压比较器、电压基准、温度传感器、定时器、可编程计数器/定时器阵列(CPA)、内部振荡器、看门狗定时器、电源监视器、SMBus/I2C、UART及SPI等。这些外设部件的高度集成为设计小体积、低功耗、高可靠性和高性能的单片机应用系统提供了方便,也可使系统的整体成本大大降低。
异步FIFO是一种先进先出的电路,使用在需要异步时钟数据接口的部分,用来存储。缓冲在两个异步时钟域之间的数据传输,保证能够在很快的时间内将数据保存至FLASH中。
设计中使用FIFO结构,因为:
(1)由要存储信号的特征决定的。3路传感器数据属于连续性数据,但是FLASH不能同时写入3路数据,FIFO是解决此问题的最好方法。
(2)由FLASH的特点决定的。FLASH存储器是一种间歇性工作的器件,存储时有一段200 μs左右的页编程时间,是不能对其进行任何操作,FIFO可以帮助存储这段时间内采集的数据。
(3)便于速度匹配。写数时可以协调FLASH写入速度与数据传输的速度匹配问题。
鉴于上述原因,系统选用IDT72V04的硬件FIFO。
数据采集电路如图4所示。将调理后信号送至单片机的P3.1脚,经C8051F310单片机自带的12位AD采用200KHz转换速率转换该信号,转换后经P2口发送至硬件FIFO芯片IDT71V04。单片机的P3.3脚发送低电平时,数据写FIFO使能。当硬件FIFO半满后,将IDT71V04的23引脚置1,通知后级单片机读取数据。为了保证C8051F310单片机能准备发送写命令,不丢数据,在P3.3脚接47pF电容,起到滤波作用。

图4 数据采集电路
3.4 存储单元选择
SAMSUNG公司长期生产FLASH存储器。公司的产品采用NAND原理,技术成熟,芯片质量稳定可靠。SAMSUNG公司生产的FLASH存储器有以下特点:
(1)容量范围大,便于挑选;
(2)不同容量、不同型号芯片的封装相同,便于扩展;
(3)不同容量、不同型号芯片的用法相同,便于使用;
(4)地址线、数据线复用,减小了控制引脚数量。
基于微型化的设计原则,要尽可能地选用大容量的存储芯片。结合存储器容量和芯片级别要求,选用SAMSUNG公司的具有1GByte容量的芯片K9K8G08。只要一片该存储器,就可以满足容量要求,减小存储模块的体积,便于存储模块的结构设计和防护。
FLASH控制模块的作用,是要按照FLASH存储器控制时序要求,具体完成对FLASH的读、写和块擦除操作。K9K8G08的外部仅有8个I/O管脚,这8个管脚既是地址、数据输入输出端口,也是命令输入端口,命令、地址和数据是通过分时复用来完成不同操作的[7]。对K9K8G08的操作主要包括:页编程、双页编程、读数、块擦除和无效块处理。
存储单元电路如图5所示。为了将前端单片机采集的数据全部保存到FLASH,需要后端单片机以3倍码流的速度来读取并保存数据。当对应的硬件FIFO半满后,相应的标志位HFA(HFB或者HFC)置1,通知后级单片机读取数据。后端单片机通过与FIFO相连的RDA(RDB或者RDC)发送逻辑命令,读取数据。读取数据后,打包并将数据发送至FLASH保存。
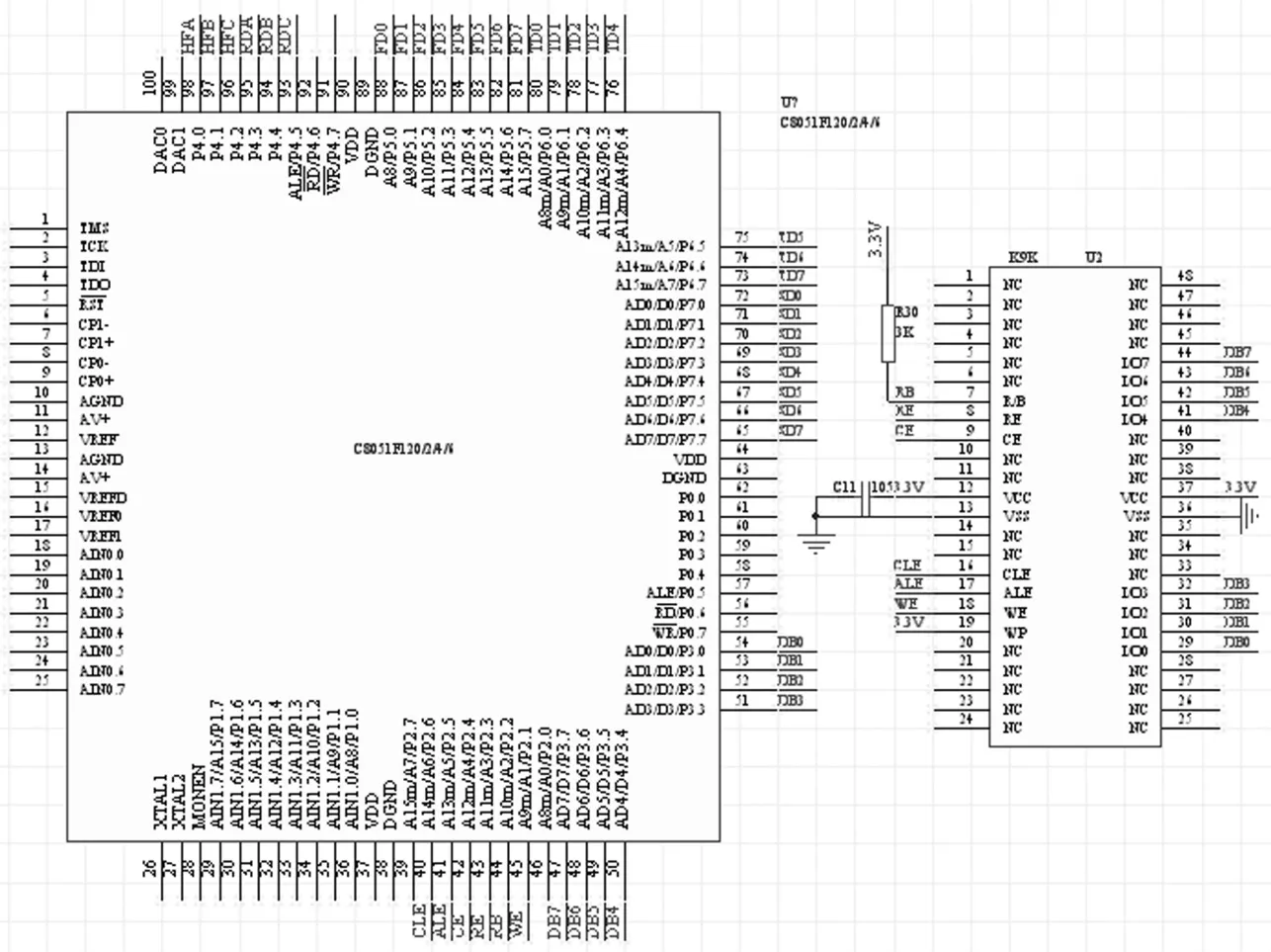
图5 存储单元电路图
4 结束语
该测试系统为自行高炮在发射时的稳定性研究,提供了依据,据此可以改良其结构,增加炮射稳定性。由于自行高炮的威力大,炮射速度快,后坐力大,发射后自行高炮的位移反复变化非常快,因此要想更加真实的反应其位移变化情况,就需要反应速度更加快的位移传感器,来改良此测试系统。
[1]何 永,高树滋,王显会.我国发展车载炮系统的可行性分析[J].南京理工大学学报,2003,10(5):536-540
[2]毋强,杨福缘.模拟与仿真技术在自行高炮研制中的应用[J].火炮发射与控制学报 1996,(1):5-8
[3]宗士增,钱林方.火炮反后坐装置动力学祸合分析与优化[J].兵工学报,2007,3(3):273.
[4]王靖君,赫信鹏.火炮概论[M].南京:南京理工大学出版社,2003.
[5]肖金球,冯翼,仲嘉纛.高速多路实时数据采集处理系统设[J].计算机工程,2004,30(24):180-181.
[6]童长飞.C8051F系列单片机开发与C语言编程[M].北京:北京航空航天大学出版社,2005.
[7]任勇峰,郭亚力,郭晓辉.FLASH存储器的高速写入方法[J].电脑开发与应用,2001,14(5):5-6.