“电机与拖动基础”课程仿真软件的设计
2010-01-27邓先明方荣惠
邓先明,方荣惠,胡 堃,韩 丽
(中国矿业大学信息与电气工程学院,江苏徐州 221008)
“电机与拖动基础”课程仿真软件的设计
邓先明,方荣惠,胡 堃,韩 丽
(中国矿业大学信息与电气工程学院,江苏徐州 221008)
“电机与拖动基础”课程是电气专业的核心课程,电机特性是其重要内容之一。仿真软件是分析电机工作特性的最有效工具。本文对仿真软件的开发步骤进行了详细讨论,同时给出了仿真软件的VC程序实例。
电机工作特性;仿真软件;VC程序
0 引言
《电机与拖动基础》课程以概念多、理论繁杂、实用性强为特点。课程除要求学生具备较好的数学、物理基础知识外,还须有较强的空间想象力,课程中电机的结构和电磁关系等内容,都是与三维空间相关的知识。另外,电机的过渡过程、复杂的时空图和电机的工作特性规律等,这些内容借助板书和教师的语言讲解很难表达透彻,学生理解较困难。近年来,计算机技术和多媒体技术的迅猛发展,计算机辅助教学CA I广泛应用于课堂教学中,为课堂教学带来了技术革新。我们进行的教学改革将上述难以表达的知识制成多媒体课件,用生动具体的形式来传授知识,学生理解较容易,教学效果良好。因此,在开发“电机与拖动基础”多媒体CAI课件时,其中的仿真软件的设计一般是必不可少的。在众多的Window s程序开发工具中,Visual C++6.0是强大的开发软件之一。它是一种高度集成的开发环境,使用了可视化界面、编程向导和智能感应等技术,为W indow s应用程序的创建、修改和调试提供了极大的方便。生成的执行文件不仅代码量小,而且其安全性和健壮性都很好。本文将介绍Visual C++6.0制作仿真软件的方法和程序实现。
1 电机的数学模型[1]
基于电动机的电力拖动系统结构如图1。电动机产生电磁转矩Tem拖动机械生产设备去完成相应的生产任务。它们在运动过程中,必须遵循以下动力学关系:

式中,J代表系统的转动惯量,ω代表系统的角速度。
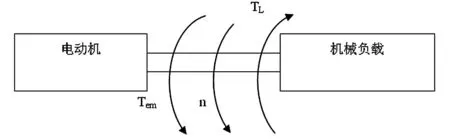
图1 电力拖动结构图
由式(1)可知,当系统需要稳定运行时,电动机产生的电磁转矩必须等于负载转矩。当需要改变电机速度时,必须控制电机的电磁转矩瞬间发生改变,打破转矩平衡关系,使系统进入加速或减速过程。
并励直流电动机的等效电路如图2。
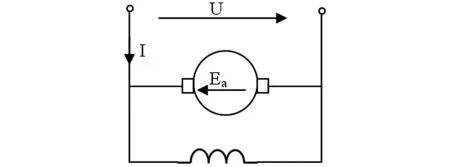
图2 直流电动机等效电路
利用直流电机的电势、电磁转矩方程,并结合图2,可以得出直流电动机的机械特性为:

异步电动机的等效电路如图3。图中的参数为:x1是定子漏电抗,r1是定子电阻,r2′是转子电阻,jx2′是转子漏电抗,xm是励磁电抗,rm是励磁电阻,r2′(1-s)/s是等效负载电阻。
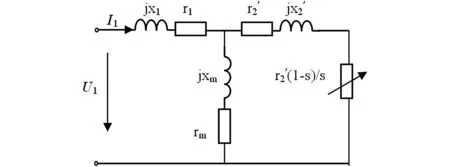
图3 异步电机的等效电路
利用图3可以推导出异步电动机的机械特性方程为:

利用等效电路还可以推导出电动机的其它特性的数学表达式,例如效率特性、功率因数特性等。
2 电机仿真软件的设计
2.1 仿真软件的设计思路
在上述电机特性的计算模型基础上,借助VC6.0编程软件就可以设计出相应的仿真软件。具体设计框图如图4。
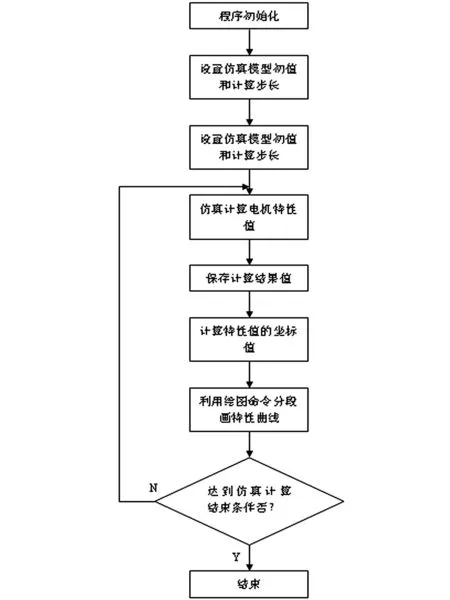
图4 仿真程序框图
2.2 仿真软件的程序实现
下面以异步电动机的机械特仿真程序的设计为例,详细讨论程序的设计过程。
(1)用VC++6.0的编程向导,创建一个名为"Elctricmachine"的基于对话框的应用程序框架[2,3]。
(2)在CPP文件的开始处添加相应的头文件名和定义相应的全局变量。
2.3 电机仿真软件的程序界面
利用VC6.0工具,设计出直流电动机的机械特性、启动特性、制动特性,异步电动机的机械特性、启动特性、制动特性,以及变压器的空载电势波形等十三个仿真程序。其部分运行结果如图5~8。
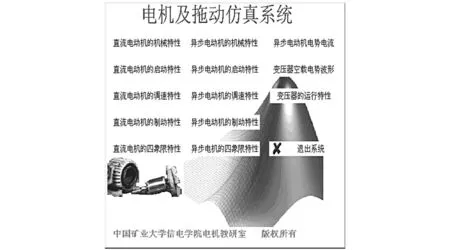
图5 仿真程序界面
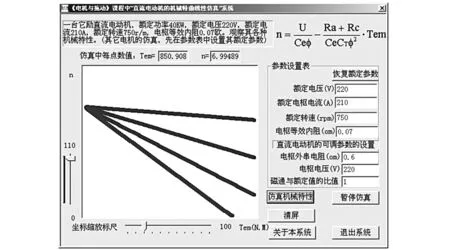
图6 直流电动机机械特性仿真
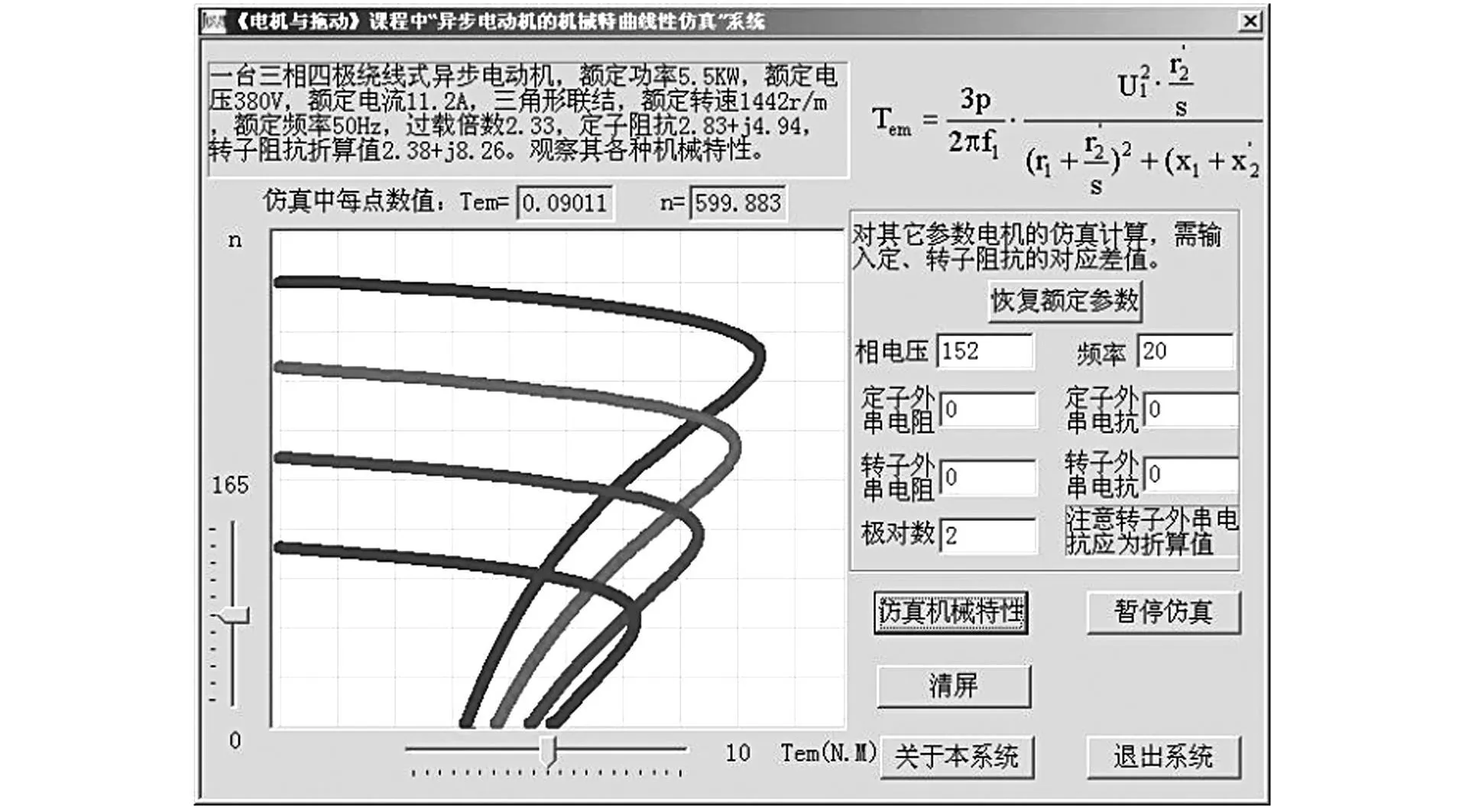
图7 异步电动机机械特性仿真
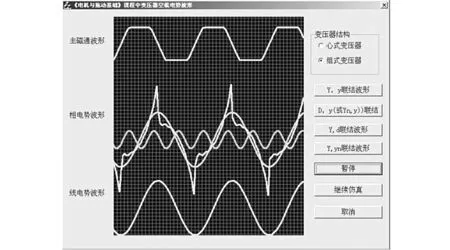
图8 变压器空载电势波形仿真
3 结论
《电机与拖动基础》课程中包含了直流电机、变压器、异步机和同步电机,它们的工作特性是重要的教学内容。通过仿真软件的演示和分析可以很清楚地展示它们的变化规律,教学效果良好。论文利用VC6.0软件,对电机特性的仿真软件设计进行了详细讨论。为该类课程的仿真软件设计提供了一定参考。
[1] 方荣惠,邓先明编,电机原理及拖动基础,中国矿业大学出版社,2004
[2] 陈冠民等译,VisualC++5.0开发技术内幕,机械工业出版社,1999
[3] 王华等编著,Visual C++610编程实例与技巧,机械工业出版社,1999
邓先明(1970-),男,博士,教授,主要从事电机方面的教学和研究工作,E-m ail:xmdeng3883023@hotmail.com
